遗传算法优化VRPTW问题概述
遗传算法(Genetic Algorithm, GA)是一种模拟自然选择和遗传机制的优化算法,能够有效解决组合优化问题。其中,VRPTW(Vehicle Routing Problem with Time Windows)是一种典型的组合优化问题,旨在确定最优的车辆路径规划,以满足客户需求的时间窗口限制。本文将介绍遗传算法在优化VRPTW问题中的应用,并提供一个基于遗传算法的流程图。
一、问题描述
VRPTW问题是指在一组客户节点的地图上,有一辆或多辆车辆需要在特定时间内访问这些节点,同时满足各个节点的需求。每个节点有特定的服务时间和时间窗口,而车辆有固定的容量和行驶时间限制。VRPTW问题的目标是找到最优的车辆路径规划,使得所有需求被满足,且总成本最小。
二、遗传算法优化VRPTW问题
遗传算法是一种模拟生物进化过程的优化算法,它通过模拟自然选择、交叉和变异等机制来搜索最优解。下面是基于遗传算法优化VRPTW问题的流程:
-
初始化种群:随机生成一组初始解作为种群,每个解表示一组车辆路径规划。
-
评估适应度:计算每个个体的适应度,即评估该路径规划的质量。适应度可以根据目标函数(如总成本)来定义。
-
选择操作:根据适应度值,使用选择算子选择一定数量的个体作为父代。
-
交叉操作:对父代个体进行交叉操作,生成新的子代个体。交叉操作可以使用交叉算子(如单点交叉、多点交叉)来实现。
-
变异操作:对子代个体进行变异操作,引入随机扰动以增加个体的多样性。变异操作可以使用变异算子(如位变异、插入变异)来实现。
-
替换操作:根据适应度值,使用替换算子将部分父代和子代个体替换为下一代个体。
-
终止条件判断:判断是否满足终止条件,如达到最大迭代次数或找到满意的解。
-
返回最优解:返回适应度最高的个体作为最优解,即最优的车辆路径规划。
三、实验结果
在实际应用中,可以根据具体问题的约束条件和目标函数来设置遗传算法的参数。例如,种群大小、交叉率、变异率等参数的设置都会影响算法的性能和结果。
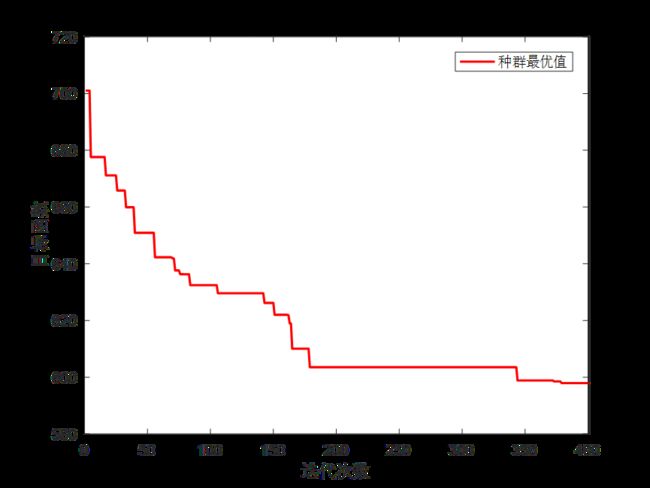
通过在多个VRPTW实例上进行实验,可以验证遗传算法在优化VRPTW问题上的有效性。实验结果可以包括总成本的降低、路径规划的优化等指标。
runtime1 =
21.3688398
遗传算法优化得到的最优目标函数
bestValue =
597.931097333565
遗传算法优化得到的最优染色体
bestChrom =
1 至 7 列
0.571179742259523 0.83700537487725 0.284746980427181 0.0394207756218597 0.839076214395033 0.223366512555334 0.120976517498948
8 至 14 列
0.624120564490613 0.552245889116193 0.232772855196508 0.241348134931805 0.953390054383031 0.194482246038729 0.477202176804283
15 至 19 列
0.923156893776337 0.564921143727806 0.105869596407688 0.029668947229939 0.129064113427449
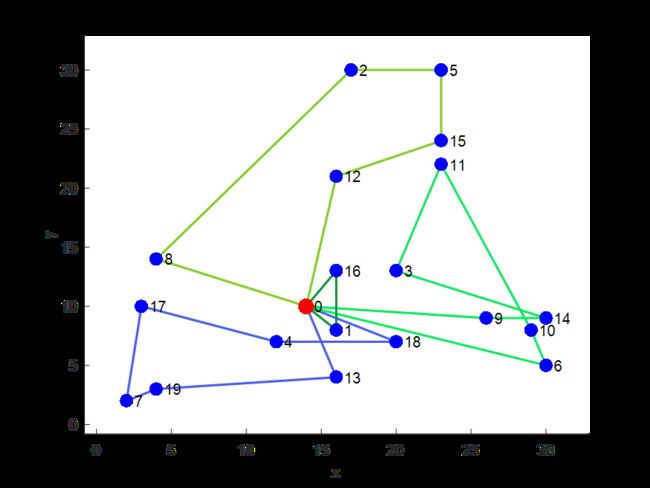
显示各个路径(遗传算法)
第1辆车的路径
route1 =
0 18 4 17 7 19 13 0
loadline =
0 0 1000
1000 1000 860
860 860 690
690 690 550
550 550 380
380 380 180
180 180 0
0 0 0
运行时间表
outcell01 =
'路径点' '到达时间' '开始服务时间' '结束时间'
[ 0] [ 1] [6.86583592135001] [6.86583592135001]
[ 18] [ 7] [ 7] [ 7.1]
[ 4] [ 7.26] [ 7.26] [ 7.36]
[ 17] [ 7.5497366596101] [ 7.5497366596101] [ 7.6497366596101]
[ 7] [7.81098181457607] [7.81098181457607] [7.91098181457607]
[ 19] [7.95570317412607] [7.95570317412607] [8.05570317412607]
[ 13] [8.29653506570191] [8.29653506570191] [8.39653506570191]
[ 0] [8.52302617210865] [8.52302617210865] [8.52302617210865]
第2辆车的路径
route1 =
0 6 10 11 3 14 9 0
loadline =
0 0 920
920 920 710
710 710 610
610 610 390
390 390 240
240 240 110
110 110 0
0 0 0
运行时间表
outcell01 =
'路径点' '到达时间' '开始服务时间' '结束时间'
[ 0] [ 1] [ 6.1647389077152] [ 6.1647389077152]
[ 6] [ 6.5] [ 6.5] [ 6.6]
[ 10] [6.66324555320337] [6.66324555320337] [6.76324555320337]
[ 11] [7.06787647743792] [7.06787647743792] [7.16787647743792]
[ 3] [7.35761313704803] [7.35761313704803] [7.45761313704802]
[ 14] [7.67301972933341] [7.67301972933341] [ 7.7730197293334]
[ 9] [7.85301972933341] [7.85301972933341] [ 7.9530197293334]
[ 0] [8.19385162090925] [8.19385162090925] [8.19385162090925]
第3辆车的路径
route1 =
0 16 1 0
loadline =
0 0 470
470 470 240
240 240 0
0 0 0
运行时间表
outcell01 =
'路径点' '到达时间' '开始服务时间' '结束时间'
[ 0] [ 1] [6.42788897449072] [6.42788897449072]
[ 16] [ 6.5] [ 6.5] [ 6.6]
[ 1] [ 6.7] [ 6.7] [ 6.8]
[ 0] [6.85656854249492] [6.85656854249492] [6.85656854249492]
第4辆车的路径
route1 =
0 8 2 5 15 12 0
loadline =
0 0 930
930 930 770
770 770 650
650 650 450
450 450 230
230 230 0
0 0 0
运行时间表
outcell01 =
'路径点' '到达时间' '开始服务时间' '结束时间'
[ 0] [ 1] [7.78459340771462] [7.78459340771462]
[ 8] [ 8] [ 8] [ 8.1]
[ 2] [8.51231056256177] [8.51231056256177] [8.61231056256177]
[ 5] [8.73231056256176] [8.73231056256176] [8.83231056256176]
[ 15] [8.95231056256176] [8.95231056256176] [9.05231056256176]
[ 12] [9.20462602467904] [9.20462602467904] [9.30462602467904]
[ 0] [9.52823282242902] [9.52823282242902] [9.52823282242902]
punish_early =
0
punish_late =
0
outcell =
'节点编号' '达到时间' '离开时间'
[ 1] [ 6.7] [ 6.8]
[ 2] [8.51231056256177] [8.61231056256177]
[ 3] [7.35761313704803] [7.45761313704802]
[ 4] [ 7.26] [ 7.36]
[ 5] [8.73231056256176] [8.83231056256176]
[ 6] [ 6.5] [ 6.6]
[ 7] [7.81098181457607] [7.91098181457607]
[ 8] [ 8] [ 8.1]
[ 9] [7.85301972933341] [ 7.9530197293334]
[ 10] [6.66324555320337] [6.76324555320337]
[ 11] [7.06787647743792] [7.16787647743792]
[ 12] [9.20462602467904] [9.30462602467904]
[ 13] [8.29653506570191] [8.39653506570191]
[ 14] [7.67301972933341] [ 7.7730197293334]
[ 15] [8.95231056256176] [9.05231056256176]
[ 16] [ 6.5] [ 6.6]
[ 17] [ 7.5497366596101] [ 7.6497366596101]
[ 18] [ 7] [ 7.1]
[ 19] [7.95570317412607] [8.05570317412607]
>>
四、总结
本文介绍了遗传算法在优化VRPTW问题中的应用,并提供了一个基于遗传算法的流程图。遗传算法通过模拟自然选择和遗传机制,能够搜索最优解并优化车辆路径规划,以满足VRPTW问题的约束条件和目标函数。通过实验结果的分析,可以验证遗传算法在优化VRPTW问题上的有效性,并为进一步的研究提供指导。
参考文献:
- Goldberg, D. E. (1989). Genetic algorithms in search, optimization, and machine learning. Addison-Wesley.
- Cordeau, J. F., Gendreau, M., & Laporte, G. (2002). A tabu search heuristic for the vehicle routing problem with time windows. Transportation Science, 36(4), 429-443.