vins-fusion用自己的双目相机时需要修改的参数文件
https://blog.csdn.net/CSDN_XCS/article/details/91039481

感觉这篇更OK。
https://blog.csdn.net/sinat_16643223/article/details/115362074

似乎订阅的话题也写在这个yaml文件里面了。

我发现之前自己用XTDrone的vins-fusion跑的时候也是在yaml文件里面改对应订阅的话题,似乎可能这就是共同点,这个yaml文件很可能就是那个双目+IMU的标定参数的yaml文件!!!
https://blog.csdn.net/sinat_16643223/article/details/115363850

https://blog.csdn.net/sinat_16643223/article/details/115276730

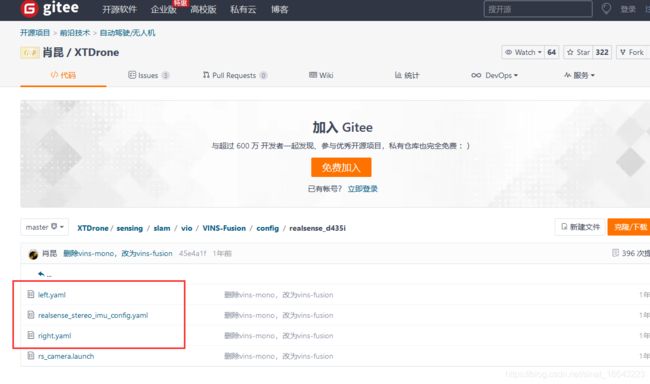
可以确定是有三个yaml文件的,其中stereo_imu.yaml应该是双目IMU联合标定的参数文件,这个yaml文件也include了另外两个yaml文件,就是左右两个相机的参数文件。结合下面这三篇博文应该可以得出这个结论。
https://blog.csdn.net/sinat_16643223/article/details/115362074
https://blog.csdn.net/sinat_16643223/article/details/115363850
https://blog.csdn.net/sinat_16643223/article/details/115276730
https://gitee.com/robin_shaun/XTDrone/tree/master/sensing/slam/vio/VINS-Fusion/config/realsense_d435i
==========================================================================
最后运行vins-fusion的命令似乎都是这样,启动vins_node节点命令上对应的yaml文件,看到多次了
一共三条命令都是
第一个启动realsense摄像头的
第二个打开rviz的
第三个vins_node的
https://blog.csdn.net/weixin_44350238/article/details/102751819?utm_medium=distribute.pc_relevant.none-task-blog-2~default~baidujs_title~default-1.base&spm=1001.2101.3001.4242

https://blog.csdn.net/sinat_16643223/article/details/115276777

https://blog.csdn.net/sinat_16643223/article/details/115276730

这可能是加开回环检测的命令。现在应该也可以明白他们之前跑VINS说这是没有开回环的效果,说明这个回环不是默认开的,是可以单独开的。
https://blog.csdn.net/sinat_16643223/article/details/115276673

====================================================================
我们具体看下yaml文件,发现两个摄像头的yaml文件是比较简单的,感觉和我们标定普通的USB摄像头一样,填写的也是那几个参数。
https://gitee.com/robin_shaun/XTDrone/blob/master/sensing/slam/vio/VINS-Fusion/config/realsense_d435i/right.yaml
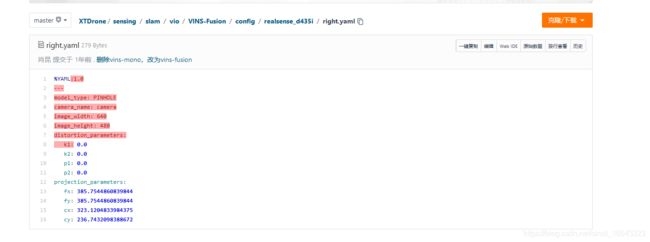
https://gitee.com/robin_shaun/XTDrone/blob/master/sensing/slam/vio/VINS-Fusion/config/realsense_d435i/left.yaml

那么首先T265的这两个摄像头的这些参数怎么获得呢。
这里说T265的出场标定参数可以这么获得。
https://blog.csdn.net/sinat_16643223/article/details/118959961
