Coursera吴恩达机器学习课程笔记——神经网络: 学习(Neural Networks: Learning)
9 神经网络: 学习(Neural Networks: Learning)
9.1 代价函数(Cost Function)
神经网络的分类问题有两种:
-
二元分类问题(0/1分类)
只有一个输出单元( K = 1 K=1 K=1)
-
多元( K K K)分类问题
输出单元不止一个( K > 1 K\gt1 K>1)
神经网络的代价函数公式:
h Θ ( x ) = a ( L ) = g ( Θ ( L − 1 ) a ( L − 1 ) ) = g ( z ( L ) ) h_\Theta(x) = a^{(L)} = g(\Theta^{(L-1)}a^{(L-1)}) = g(z^{(L)}) hΘ(x)=a(L)=g(Θ(L−1)a(L−1))=g(z(L))
KaTeX parse error: {gather*} can be used only in display mode.
L L L: 神经网络的总层数
s l s_l sl: 第 l l l 层激活单元的数量(不包含偏置单元)
h Θ ( x ) k h_\Theta(x)_k hΘ(x)k: 分为第 k k k 个分类( k t h k^{th} kth)的概率 $P(y=k | x ; \Theta) $
K K K: 输出层的输出单元数量,即类数 - 1
y k ( i ) y_k^{(i)} yk(i): 第 i i i 个训练样本的第 k k k 个分量值
y y y: K K K 维向量
注:此处符号表达和第四周的内容有异有同,暂时先按照视频来,有必要的话可以做下统一.
公式可长可长了是吧,但是不是有些熟悉?对照下逻辑回归中的代价函数:
J ( θ ) = − 1 m ∑ i = 1 m [ y ( i ) log ( h θ ( x ( i ) ) ) + ( 1 − y ( i ) ) log ( 1 − h θ ( x ( i ) ) ) ] + λ 2 m ∑ j = 1 n θ j 2 J(\theta) = - \frac{1}{m} \sum_{i=1}^m [ y^{(i)}\ \log (h_\theta (x^{(i)})) + (1 - y^{(i)})\ \log (1 - h_\theta(x^{(i)}))] + \frac{\lambda}{2m}\sum_{j=1}^n \theta_j^2 J(θ)=−m1∑i=1m[y(i) log(hθ(x(i)))+(1−y(i)) log(1−hθ(x(i)))]+2mλ∑j=1nθj2
在神经网络的代价函数中,
- 左边的变化实际上是为了求解 K K K 分类问题,即公式会对每个样本特征都运行 K K K 次,并依次给出分为第 k k k 类的概率, h Θ ( x ) ∈ R K , y ∈ R K h_\Theta(x)\in \mathbb{R}^{K}, y \in \mathbb{R}^{K} hΘ(x)∈RK,y∈RK。
- 右边的正则化项比较容易理解,每一层有多维矩阵 Θ ( l ) ∈ R ( s l + 1 ) × s l + 1 \Theta^{(l)}\in \mathbb{R}^{(s_l + 1)\times s_{l+1}} Θ(l)∈R(sl+1)×sl+1,从左到右看这个三次求和式 ∑ l = 1 L − 1 ∑ i = 1 s l ∑ j = 1 s l + 1 \sum\limits_{l=1}^{L-1}\sum\limits_{i=1}^{s_l}\sum\limits_{j=1}^{s_{l+1}} l=1∑L−1i=1∑slj=1∑sl+1 ,就是对每一层间的多维矩权重 Θ ( l ) \Theta^{(l)} Θ(l) ,依次平方后求取其除了偏置权重部分的和值,并循环累加即得结果。
R m \mathbb{R}^{m} Rm: 即 m m m 维向量
R m × n \mathbb{R}^{m\times n} Rm×n: 即 m × n m \times n m×n 维矩阵
再次可见,神经网络背后的思想是和逻辑回归一样的,但由于计算复杂,实际上神经网络的代价函数 J ( Θ ) J(\Theta) J(Θ) 是一个非凸(non-convex)函数。
9.2 反向传播算法(Backpropagation Algorithm)
类似于回归模型中的梯度下降算法,为了求解神经网络最优化问题,我们也要计算 ∂ ∂ Θ J ( Θ ) \frac{\partial}{\partial\Theta}J(\Theta) ∂Θ∂J(Θ),以此 minimize Θ J ( Θ ) \underset{\Theta}{\text{minimize}}J(\Theta) ΘminimizeJ(Θ) 。
在神经网络中,代价函数看上去虽然不复杂,但要注意到其中 h Θ ( x ) h_\Theta(x) hΘ(x) 的求取实际上是由前向传播算法求得,即需从输入层开始,根据每层间的权重矩阵 Θ \Theta Θ 依次计算激活单元的值 a a a。 在最优化代价函数时,我们必然也需要最优化每一层的权重矩阵,再次强调一下,算法最优化的是权重,而不是输入。
反向传播算法用于计算每一层权重矩阵的偏导 ∂ ∂ Θ J ( Θ ) \frac{\partial}{\partial\Theta}J(\Theta) ∂Θ∂J(Θ),算法实际上是对代价函数求导的拆解。
-
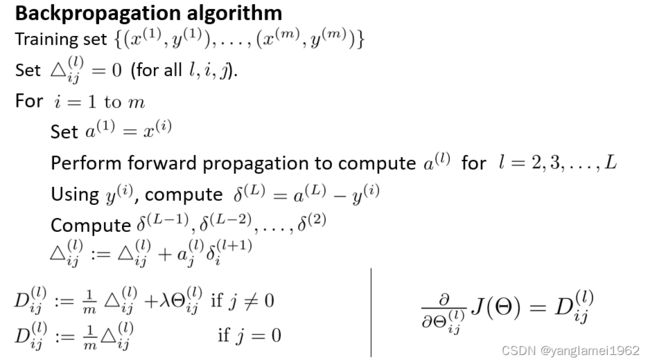
对于给定训练集 { ( x ( 1 ) , y ( 1 ) ) ⋯ ( x ( m ) , y ( m ) ) } \lbrace (x^{(1)}, y^{(1)}) \cdots (x^{(m)}, y^{(m)})\rbrace {(x(1),y(1))⋯(x(m),y(m))} ,初始化每层间的误差和矩阵 Δ \Delta Δ,即令所有的 Δ i , j ( l ) = 0 \Delta^{(l)}_{i,j}=0 Δi,j(l)=0,使得每个 Δ ( l ) \Delta^{(l)} Δ(l) 为一个全零矩阵。
-
接下来遍历所有样本实例,对于每一个样本实例,有下列步骤:
-
运行前向传播算法,得到初始预测 a ( L ) = h Θ ( x ) a^{(L)}=h_\Theta(x) a(L)=hΘ(x) 。
-
运行反向传播算法,从输出层开始计算每一层预测的误差(error),以此来求取偏导。
-
输出层的误差即为预测与训练集结果的之间的差值:$\delta^{(L)} = a^{(L)} - y$,
对于隐藏层中每一层的误差,都通过上一层的误差来计算:
$\delta^{(l)} = (\Theta^{(l)})^T\delta^{(l+1)} .*\ \frac{\partial a^{(l)}}{\partial z^{(l)}}\; \; \; \; \; \text{for }l := L-1, L-2,\dots,2.$
隐藏层中,$a^{(l)}$ 即为增加偏置单元后的 $g(z^{(l)})$,$a^{(l)}$ 与 $\Theta^{(l)}$ 维度匹配,得以完成矩阵运算。
即对于隐藏层,有 $a^{(l)} = (g(z^{(l)})$ 添加偏置单元 $a^{(l)}_0 = 1)$
解得 $\frac{\partial}{\partial z^{(l)}}g(z^{(l)})=g'(z^{(l)})=g(z^{(l)}) .* \ (1-g(z^{(l)}))$,
则有 $\delta^{(l)} = (\Theta^{(l)})^T\delta^{(l+1)} .*\ a^{(l)} .*\ (1-a^{(l)}), \ \ a^{(l)}_0 = 1$。
> $\delta^{(l)}$ 求导前的公式不同于视频内容,经核实为视频内容错误。推导请阅下节。
根据以上公式计算依次每一层的误差 $\delta^{(L)}, \delta^{(L-1)},\dots,\delta^{(2)}$。
-
依次求解并累加误差 Δ i , j ( l ) : = Δ i , j ( l ) + a j ( l ) δ i ( l + 1 ) \Delta^{(l)}_{i,j} := \Delta^{(l)}_{i,j} + a_j^{(l)} \delta_i^{(l+1)} Δi,j(l):=Δi,j(l)+aj(l)δi(l+1),向量化实现即 Δ ( l ) : = Δ ( l ) + δ ( l + 1 ) ( a ( l ) ) T \Delta^{(l)} := \Delta^{(l)} + \delta^{(l+1)}(a^{(l)})^T Δ(l):=Δ(l)+δ(l+1)(a(l))T
-
遍历全部样本实例,求解完 Δ \Delta Δ 后,最后则求得偏导 ∂ ∂ Θ i , j ( l ) J ( Θ ) = D i , j ( l ) \frac \partial {\partial \Theta_{i,j}^{(l)}} J(\Theta)=D_{i,j}^{(l)} ∂Θi,j(l)∂J(Θ)=Di,j(l)
- D i , j ( l ) : = 1 m ( Δ i , j ( l ) + λ Θ i , j ( l ) ) D^{(l)}_{i,j} := \dfrac{1}{m}\left(\Delta^{(l)}_{i,j} + \lambda\Theta^{(l)}_{i,j}\right) Di,j(l):=m1(Δi,j(l)+λΘi,j(l)), if j ≠ 0 j\neq0 j=0,
- D i , j ( l ) : = 1 m Δ i , j ( l ) D^{(l)}_{i,j} := \dfrac{1}{m}\Delta^{(l)}_{i,j} Di,j(l):=m1Δi,j(l), if j = 0 j=0 j=0.(对应于偏置单元)
δ ( l ) \delta^{(l)} δ(l): 第 l l l 层的误差向量
δ i ( l ) \delta^{(l)}_i δi(l): 第 l l l 层的第 i i i 个激活单元的误差
Δ i , j ( l ) \Delta^{(l)}_{i,j} Δi,j(l): 从第 l l l 层的第 j j j 个单元映射到第 l + 1 l+1 l+1 层的第 i i i 个单元的权重代价的偏导(所有样本实例之和)
D i , j ( l ) D^{(l)}_{i,j} Di,j(l): Δ i , j ( l ) \Delta^{(l)}_{i,j} Δi,j(l) 的样本均值与正则化项之和
注:无需计算 δ ( 1 ) \delta^{(1)} δ(1),因为输入没有误差。
这就是反向传播算法,即从输出层开始不断向前迭代,根据上一层的误差依次计算当前层的误差,以求得代价函数的偏导。
应用反向传播(BP)算法的神经网络被称为 BP 网络,也称前馈网络(向前反馈)。
《机器学习》一书中提到的 BP 网络强大之处:
任何布尔函数都可由两层神经网络准确表达,但所需的中间单元的数量随输入呈指数级增长;
任何连续函数都可由两层神经网络以任意精度逼近;
任何函数都可由三层神经网络以任意程度逼近。
9.3 直观理解反向传播(Backpropagation Intuition)
这节给出了反向传播算法中误差的数学意义:
c o s t ( t ) = y ( t ) log ( h Θ ( x ( t ) ) ) + ( 1 − y ( t ) ) log ( 1 − h Θ ( x ( t ) ) ) cost(t) =y^{(t)} \ \log (h_\Theta (x^{(t)})) + (1 - y^{(t)})\ \log (1 - h_\Theta(x^{(t)})) cost(t)=y(t) log(hΘ(x(t)))+(1−y(t)) log(1−hΘ(x(t)))
δ j ( l ) = ∂ ∂ z j ( l ) c o s t ( t ) \delta_j^{(l)} = \dfrac{\partial}{\partial z_j^{(l)}} cost(t) δj(l)=∂zj(l)∂cost(t)
视频内容实际在上文都涉及到了,上节也做了解释:
反向传播算法,即从输出层开始不断向前迭代,根据上一层的误差依次计算当前层的误差,以求得代价函数的偏导。
不过,这块还是有些不好理解,可回顾视频。
前文提到输入层没有偏差,所以没有 δ ( 1 ) \delta^{(1)} δ(1),同样的,偏置单元的值始终为 1,也没有误差,故一般会选择忽略偏置单元项的误差。
神经网络中代价函数求导的推导过程:
代价函数无正则化项时:
KaTeX parse error: {gather*} can be used only in display mode.
再次的,为了方便起见,这里假设样本只有一个,则有:
KaTeX parse error: {gather*} can be used only in display mode.
忆及 h Θ ( x ) = a ( L ) = g ( z ( L ) ) h_\Theta(x) = a^{(L)} = g(z^{(L)}) hΘ(x)=a(L)=g(z(L)), g ( z ) = 1 1 + e ( − z ) g(z) = \frac{1}{1+e^{(-z)}} g(z)=1+e(−z)1,代入后整理后可得:
J ( Θ ) = y log ( 1 + e − z ( L ) ) + ( 1 − y ) log ( 1 + e z ( L ) ) J(\Theta) ={y}\log \left( 1+{{e}^{-z^{(L)}}} \right)+\left( 1-{y} \right)\log \left( 1+{{e}^{z^{(L)}}} \right) J(Θ)=ylog(1+e−z(L))+(1−y)log(1+ez(L))

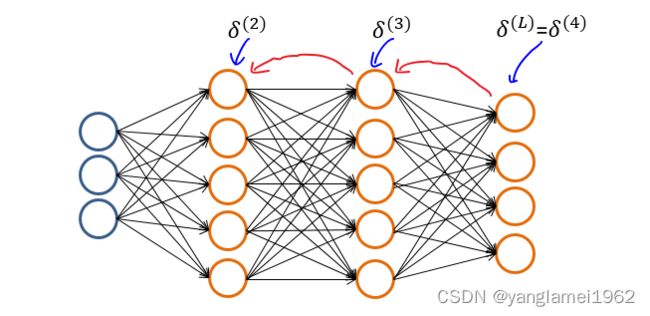
再次为了便于计算,我们用到如上图这个三层(输入层一般不计数)神经网络。
忆及 z ( l ) = Θ ( l − 1 ) a ( l − 1 ) z^{(l)} = \Theta^{(l-1)}a^{(l-1)} z(l)=Θ(l−1)a(l−1),我们有 h Θ ( x ) = a ( 4 ) = g ( z ( 4 ) ) = g ( Θ ( 3 ) a ( 3 ) ) h_\Theta(x)=a^{(4)}= g(z^{(4)})=g(\Theta^{(3)}a^{(3)}) hΘ(x)=a(4)=g(z(4))=g(Θ(3)a(3))
观察考虑各变量与 Θ ( 3 ) \Theta^{(3)} Θ(3) 之间的关系,有 J ( Θ ) → a ( 4 ) → z ( 4 ) → Θ ( 3 ) J(\Theta) \rightarrow a^{(4)}\rightarrow z^{(4)}\rightarrow \Theta^{(3)} J(Θ)→a(4)→z(4)→Θ(3)
要计算 J ( Θ ) J(\Theta) J(Θ) 的偏导,就要按照关系不断往前看,每一次回头看,就称为一次反向传播。
把回头看的关系说的“微积分一点”,那就是 Θ ( 3 ) \Theta^{(3)} Θ(3) 的微小改变会引起 z ( 4 ) z^{(4)} z(4) 的改变, z ( 4 ) z^{(4)} z(4) 的微小改变会引起 a ( 4 ) a^{(4)} a(4) 的改变, a ( 4 ) a^{(4)} a(4) 的微小改变又会引起 $ J(\Theta)$ 的改变,关系方向也可以反过来写:$\Theta^{(3)} \rightarrow z^{(4)} \rightarrow a^{(4)} \rightarrow J(\Theta) $。
如果你还记得微积分(不然你应该也不会看到这里(*_*)~),听起来像不像在暗示链式求导?
令 δ ( l ) = ∂ ∂ z ( l ) J ( Θ ) \delta^{(l)} = \frac{\partial}{\partial z^{(l)}} J(\Theta) δ(l)=∂z(l)∂J(Θ),则有 J ( Θ ) J(\Theta) J(Θ) 关于 Θ ( 3 ) \Theta^{(3)} Θ(3) 的偏导:
∂ ∂ Θ ( 3 ) J ( Θ ) = ∂ J ( Θ ) ∂ z ( 4 ) ∂ z ( 4 ) ∂ Θ ( 3 ) = δ ( 4 ) ∂ z ( 4 ) ∂ Θ ( 3 ) \frac{\partial}{\partial\Theta^{(3)}} J(\Theta) = \frac{\partial J(\Theta)}{\partial z^{(4)}} \frac{\partial z^{(4)}}{\partial\Theta^{(3)}} = \delta^{(4)}\frac{\partial z^{(4)}}{\partial\Theta^{(3)}} ∂Θ(3)∂J(Θ)=∂z(4)∂J(Θ)∂Θ(3)∂z(4)=δ(4)∂Θ(3)∂z(4)
再次忆及 z ( l ) = Θ ( l − 1 ) a ( l − 1 ) z^{(l)} = \Theta^{(l-1)}a^{(l-1)} z(l)=Θ(l−1)a(l−1),则 ∂ z ( 4 ) ∂ Θ ( 3 ) = a ( 3 ) \frac{\partial z^{(4)}}{\partial\Theta^{(3)}} = a^{(3)} ∂Θ(3)∂z(4)=a(3)
则对于输出层,我们证得 ∂ ∂ Θ ( 3 ) J ( Θ ) = a ( 3 ) δ ( 4 ) \frac{\partial}{\partial\Theta^{(3)}} J(\Theta) = a^{(3)}\delta^{(4)} ∂Θ(3)∂J(Θ)=a(3)δ(4)。
再次忆及 g ( z ) = 1 1 + e − z g(z) = \frac{1}{1+e^{-z}} g(z)=1+e−z1, a ( L ) = g ( z ( L ) ) a^{(L)}=g(z^{(L)}) a(L)=g(z(L))
δ ( 4 ) = ∂ ∂ z ( 4 ) J ( Θ ) = y − e − z ( 4 ) 1 + e − z ( 4 ) + ( 1 − y ) e z ( 4 ) 1 + e z ( 4 ) = g ( z ( 4 ) ) − y = a ( 4 ) − y \delta^{(4)}=\frac{\partial}{\partial z^{(4)}}J(\Theta)={{y}}\frac{-e^{-z^{(4)}}}{1+e^{-z^{(4)}}}+\left( 1-{{y}} \right)\frac{{e^{z^{(4)}}}}{1+e^{z^{(4)}}} = g(z^{(4)}) - y = a^{(4)}-y δ(4)=∂z(4)∂J(Θ)=y1+e−z(4)−e−z(4)+(1−y)1+ez(4)ez(4)=g(z(4))−y=a(4)−y
即证得 δ ( 4 ) = a ( 4 ) − y \delta^{(4)} = a^{(4)}-y δ(4)=a(4)−y
对于任意的输出层 L L L 及 Θ ( L − 1 ) \Theta^{(L-1)} Θ(L−1),有 J ( Θ ) → a ( L ) → z ( L ) → Θ ( L − 1 ) J(\Theta) \rightarrow a^{(L)}\rightarrow z^{(L)}\rightarrow \Theta^{(L-1)} J(Θ)→a(L)→z(L)→Θ(L−1) 关系不变,故证得:
∂ ∂ Θ ( L − 1 ) J ( Θ ) = a ( L − 1 ) δ ( L ) , δ ( L ) = a ( L ) − y \frac{\partial}{\partial\Theta^{(L-1)}} J(\Theta) = a^{(L-1)}\delta^{(L)}, \ \ \delta^{(L)} = a^{(L)}-y ∂Θ(L−1)∂J(Θ)=a(L−1)δ(L), δ(L)=a(L)−y
好了,接下来来看一下 J ( Θ ) J(\Theta) J(Θ) 关于 Θ ( 2 ) \Theta^{(2)} Θ(2) 的偏导
仍然观察考虑各变量与 Θ ( 2 ) \Theta^{(2)} Θ(2) 之间的关系,有 J ( Θ ) → a ( 4 ) → z ( 4 ) → a ( 3 ) → z ( 3 ) → Θ ( 2 ) J(\Theta)\rightarrow a^{(4)} \rightarrow z^{(4)} \rightarrow a^{(3)} \rightarrow z^{(3)} \rightarrow\Theta^{(2)} J(Θ)→a(4)→z(4)→a(3)→z(3)→Θ(2)
∂ ∂ Θ ( 2 ) J ( Θ ) = ∂ J ( Θ ) ∂ z ( 3 ) ∂ z ( 3 ) ∂ Θ ( 2 ) = δ ( 3 ) ∂ z ( 3 ) ∂ Θ ( 2 ) = a ( 2 ) δ ( 3 ) \frac{\partial}{\partial \Theta^{(2)}}J(\Theta) = \frac{\partial J(\Theta)}{\partial z^{(3)}} \frac{\partial z^{(3)}}{\partial \Theta^{(2)}}=\delta^{(3)} \frac{\partial z^{(3)}}{\partial \Theta^{(2)}}= a^{(2)}\delta^{(3)} ∂Θ(2)∂J(Θ)=∂z(3)∂J(Θ)∂Θ(2)∂z(3)=δ(3)∂Θ(2)∂z(3)=a(2)δ(3)
δ ( 3 ) = ∂ ∂ z ( 3 ) J ( Θ ) = ∂ J ( Θ ) ∂ z ( 4 ) ∂ z ( 4 ) ∂ a ( 3 ) ∂ a ( 3 ) ∂ z ( 3 ) = δ ( 4 ) ∂ z ( 4 ) ∂ a ( 3 ) ∂ a ( 3 ) ∂ z ( 3 ) \delta^{(3)} = \frac{\partial}{\partial z^{(3)}}J(\Theta) =\frac{\partial J(\Theta)}{\partial z^{(4)}} \frac{\partial z^{(4)}}{\partial a^{(3)}}\frac{\partial a^{(3)}}{\partial z^{(3)}} = \delta^{(4)}\frac{\partial z^{(4)}}{\partial a^{(3)}}\frac{\partial a^{(3)}}{\partial z^{(3)}} δ(3)=∂z(3)∂J(Θ)=∂z(4)∂J(Θ)∂a(3)∂z(4)∂z(3)∂a(3)=δ(4)∂a(3)∂z(4)∂z(3)∂a(3)
易求得 ∂ z ( 4 ) ∂ a ( 3 ) = Θ ( 3 ) \frac{\partial z^{(4)}}{\partial a^{(3)}}=\Theta^{(3)} ∂a(3)∂z(4)=Θ(3)
g ′ ( z ) = e − z ( 1 + e − z ) 2 = ( 1 + e − z ) − 1 ( 1 + e − z ) 2 = 1 1 + e − z − 1 ( 1 + e − z ) 2 = g ( z ) ( 1 − g ( z ) ) g'(z) =\frac{e^{-z}}{(1+e^{-z})^2}=\frac{(1+e^{-z})-1}{(1+e^{-z})^2}=\frac{1}{1+e^{-z}}-\frac{1}{(1+e^{-z})^2}=g(z)(1-g(z)) g′(z)=(1+e−z)2e−z=(1+e−z)2(1+e−z)−1=1+e−z1−(1+e−z)21=g(z)(1−g(z))
即 g ′ ( z ( l ) ) = g ( z ( l ) ) . ∗ ( 1 − g ( z ( l ) ) ) g'(z^{(l)})=g(z^{(l)}) .* \ (1-g(z^{(l)})) g′(z(l))=g(z(l)).∗ (1−g(z(l)))
有 a ( l ) = ( g ( z ( l ) ) a^{(l)} = (g(z^{(l)}) a(l)=(g(z(l)) 添加偏置单元 a 0 ( l ) = 1 ) a^{(l)}_0 = 1) a0(l)=1),则 ∂ a ( 3 ) ∂ z ( 3 ) = a ( 3 ) . ∗ ( 1 − a ( 3 ) ) \frac{\partial a^{(3)}}{\partial z^{(3)}}=a^{(3)} .*\ (1-a^{(3)}) ∂z(3)∂a(3)=a(3).∗ (1−a(3)),
证明时为先求导后添加偏置单元,与前向传播算法顺序一致,实际实现时,求导和添加偏置单元的顺序可作调换,由于一般选择忽略偏置单元的误差,所以并不影响结果。
即证得 δ ( 3 ) = ( Θ ( 3 ) ) T δ ( 4 ) . ∗ ( a ( 3 ) ) ′ = ( Θ ( 3 ) ) T δ ( 4 ) . ∗ a ( 3 ) . ∗ ( 1 − a ( 3 ) ) \delta^{(3)}=(\Theta^{(3)})^T\delta^{(4)}.*(a^{(3)})'=(\Theta^{(3)})^T\delta^{(4)}.*\ a^{(3)} .*\ (1-a^{(3)}) δ(3)=(Θ(3))Tδ(4).∗(a(3))′=(Θ(3))Tδ(4).∗ a(3).∗ (1−a(3))
对于任意的隐藏层 l + 1 l + 1 l+1 及权重矩阵 Θ ( l ) \Theta^{(l)} Θ(l),有 J ( Θ ) → a ( L ) → z ( L ) → ⋯ → a ( l + 1 ) → z ( l + 1 ) → Θ ( l ) J(\Theta)\rightarrow a^{(L)} \rightarrow z^{(L)} \rightarrow \dots \rightarrow a^{(l+1)} \rightarrow z^{(l+1)} \rightarrow\Theta^{(l)} J(Θ)→a(L)→z(L)→⋯→a(l+1)→z(l+1)→Θ(l) 关系不变,故证得:
∂ ∂ Θ ( l ) J ( Θ ) = a ( l ) δ ( l + 1 ) , δ ( l ) = ( Θ ( l ) ) T δ ( l + 1 ) . ∗ a ( l ) . ∗ ( 1 − a ( l ) ) for l : = L − 1 , L − 2 , … , 2. \frac{\partial}{\partial\Theta^{(l)}} J(\Theta) = a^{(l)}\delta^{(l+1)}, \ \ \delta^{(l)} = (\Theta^{(l)})^T\delta^{(l+1)}.*\ a^{(l)} .*\ (1-a^{(l)})\; \; \; \; \; \text{for }l := L-1, L-2,\dots,2. ∂Θ(l)∂J(Θ)=a(l)δ(l+1), δ(l)=(Θ(l))Tδ(l+1).∗ a(l).∗ (1−a(l))for l:=L−1,L−2,…,2.
再添回为了计算方便去掉的 1 m \frac{1}{m} m1 和正则化项(时刻记住偏置单元不正则化)等,即可得上节中 J ( Θ ) J(\Theta) J(Θ) 的偏导。
证明结束,留个课后作业呀,自己来计算一下 J ( Θ ) J(\Theta) J(Θ) 关于 Θ ( 1 ) \Theta^{(1)} Θ(1) 的偏导,是不是能得到同样的结果?
9.4 实现注意点: 参数展开(Implementation Note: Unrolling Parameters)
在 Octave/Matlab 中,如果要使用类似于 fminunc 等高级最优化函数,其函数参数、函数返回值等都为且只为向量,而由于神经网络中的权重是多维矩阵,所以需要用到参数展开这个技巧。
说白了,这个技巧就是把多个矩阵转换为一个长长的向量,便于传入函数,之后再根据矩阵维度,转回矩阵即可。
Octave 代码:
% 多个矩阵展开为一个向量
Theta1 = ones(11, 10); % 创建维度为 11 * 10 的矩阵
Theta2 = ones(2, 4) * 2; % 创建维度为 2 * 4 的矩阵
ThetaVec = [Theta1(:); Theta2(:)]; % 将上面两个矩阵展开为向量
% 从一个向量重构还原回多个矩阵
Theta1 = reshape(ThetaVec(1:110), 11, 10)
Theta2 = reshape(ThetaVec(111:118), 2, 4)
% Theta2 = reshape(ThetaVec(111:(111 + 2 * 4) - 1), 2, 4)
reshape(A,m,n): 将向量 A 重构为 m * n 维矩阵。
9.5 梯度检验(Gradient Checking)
由于神经网络模型中的反向传播算法较为复杂,在小细节非常容易出错,从而无法得到最优解,故引入梯度检验。
梯度检验采用数值估算(Numerical estimation)梯度的方法,被用于验证反向传播算法的正确性。
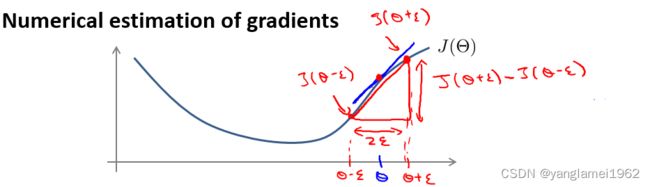
把视 Θ \Theta Θ 为一个实数,数值估算梯度的原理如上图所示,即有 ∂ ∂ Θ J ( Θ ) ≈ J ( Θ + ϵ ) − J ( Θ − ϵ ) 2 ϵ \dfrac{\partial}{\partial\Theta}J(\Theta) \approx \dfrac{J(\Theta + \epsilon) - J(\Theta - \epsilon)}{2\epsilon} ∂Θ∂J(Θ)≈2ϵJ(Θ+ϵ)−J(Θ−ϵ)
其中, ϵ \epsilon ϵ 为极小值,由于太小时容易出现数值运算问题,一般取 1 0 − 4 10^{-4} 10−4。
对于矩阵 Θ \Theta Θ,有 ∂ ∂ Θ j J ( Θ ) ≈ J ( Θ 1 , … , Θ j + ϵ , … , Θ n ) − J ( Θ 1 , … , Θ j − ϵ , … , Θ n ) 2 ϵ \dfrac{\partial}{\partial\Theta_j}J(\Theta) \approx \dfrac{J(\Theta_1, \dots, \Theta_j + \epsilon, \dots, \Theta_n) - J(\Theta_1, \dots, \Theta_j - \epsilon, \dots, \Theta_n)}{2\epsilon} ∂Θj∂J(Θ)≈2ϵJ(Θ1,…,Θj+ϵ,…,Θn)−J(Θ1,…,Θj−ϵ,…,Θn)
Octave 代码:
epsilon = 1e-4;
for i = 1:n,
thetaPlus = theta;
thetaPlus(i) += epsilon;
thetaMinus = theta;
thetaMinus(i) -= epsilon;
gradApprox(i) = (J(thetaPlus) - J(thetaMinus))/(2*epsilon);
end
在得出 gradApprox 梯度向量后,将其同之前计算的偏导 D D D 比较,如果相等或很接近,即说明算法没有问题。
在确认算法没有问题后(一般只需运行一次),由于数值估计的梯度检验效率很低,所以一定要禁用它。
9.6 随机初始化(Random Initialization)
逻辑回归中,初始参数向量全为 0 没什么问题,在神经网络中,情况就不一样了。
初始权重如果全为 0,忆及 z ( l ) = Θ ( l − 1 ) a ( l − 1 ) z^{(l)} = \Theta^{(l-1)}a^{(l-1)} z(l)=Θ(l−1)a(l−1),则隐藏层除了偏置单元,都为 0,而每个单元求导的值也都一样,这就相当于是在不断重复计算同一结果,也就是算着算着,一堆特征在每一层都变成只有一个特征(虽然有很多单元,但值都相等),这样,神经网络的性能和效果都会大打折扣,故需要随机初始化初始权重。
随机初始化权重矩阵也为实现细节之一,用于打破对称性(Symmetry Breaking),使得 Θ i j ( l ) ∈ [ − ϵ , ϵ ] \Theta^{(l)}_{ij} \in [-\epsilon,\epsilon] Θij(l)∈[−ϵ,ϵ] 。
Octave 代码:
当然,初始权重的波动也不能太大,一般限定在极小值 ϵ \epsilon ϵ 范围内,即 Θ i , j ( l ) ∈ [ − ϵ , ϵ ] \Theta^{(l)}_{i,j} \in [-\epsilon, \epsilon] Θi,j(l)∈[−ϵ,ϵ]。
If the dimensions of Theta1 is 10x11, Theta2 is 10x11 and Theta3 is 1x11.
Theta1 = rand(10,11) * (2 * INIT_EPSILON) - INIT_EPSILON;
Theta2 = rand(10,11) * (2 * INIT_EPSILON) - INIT_EPSILON;
Theta3 = rand(1,11) * (2 * INIT_EPSILON) - INIT_EPSILON;
rand(m,n): 返回一个在区间 ( 0 , 1 ) (0,1) (0,1) 内均匀分布的随机矩阵。ϵ \epsilon ϵ: 和梯度下降中的 ϵ \epsilon ϵ 没有联系,这里只是一个任意实数,给定了权重矩阵初始化值的范围。
9.7 综合起来(Putting It Together)
一般来说,应用神经网络有如下步骤:
-
神经网络的建模(后续补充)
- 选取特征,确定特征向量 x x x 的维度,即输入单元的数量。
- 鉴别分类,确定预测向量 h Θ ( x ) h_\Theta(x) hΘ(x) 的维度,即输出单元的数量。
- 确定隐藏层有几层以及每层隐藏层有多少个隐藏单元。
默认情况下,隐藏层至少要有一层,也可以有多层,层数越多一般意味着效果越好,计算量越大。
-
训练神经网络
-
随机初始化初始权重矩阵
-
应用前向传播算法计算初始预测
-
计算代价函数 J ( Θ ) J(\Theta) J(Θ) 的值
-
应用后向传播宣发计算 J ( Θ ) J(\Theta) J(Θ) 的偏导数
-
使用梯度检验检查算法的正确性,别忘了用完就禁用它
-
丢给最优化函数最小化代价函数
由于神经网络的代价函数非凸,最优化时不一定会收敛在全局最小值处,高级最优化函数能确保收敛在某个局部最小值处。
-
9.8 自主驾驶(Autonomous Driving)

描述了神经网络在于自动驾驶领域的应用实例,用于打鸡血,笔记略。