matlab+Simulink实现微分方程求解及子系统封装
1.内容
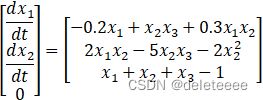
(一)、Lorenz模型的状态方程表示为:

初值为![]()
要求:
1.建立脚本,采用四阶五级的(Runge-Kutta-Felhberg, RKF)方法,调用ode45()方法求解该方程;
2.在Simulink下完成下列要求:
(1) 在Simulink下为上述方程组建立仿真模型,保存在st1.mdl中;
(2)仿真时间tout初值为0,终值根据实际情况而定,在图形窗口中设置4个子窗口,将x1(t),x2(t),x3(t)和相三维图分别绘在其中:
(a) 给该图形窗口增加标题“Lorenz模型的状态方程仿真图形”;
(b)给每个子窗口加坐标轴名称。
(3)将tout, x1(t),x2(t),x3(t)中的数据分别保存到变量t,x1,x2及x3中,将这四个变量保存到st1_data.mat数据文件中。
(二)、下面给出的微分代数方程表示为:
初始条件为x10=0.8, x20=x30=0.1
要求:
1.建立脚本,采用刚性方程求解算法ode15()函数求解该方程;
2.在Simulink下完成下列要求
(1)在Simulink下为上述一阶微分方程组建立仿真模型,保存在st1.mdl中;
(2)利用(1)中的仿真模型,在Simulink下调用ode15( )方法进行仿真求解x1(t), x2(t)和x3(t),仿真时间tout初值为0,终值为20,在图形窗口中设置2×2四个子窗口,将x1(t),x2(t),x3(t)和x(t)(包含x1(t), x2(t)和x3(t)三个变量),分别绘在四个子窗口中,并包括:
(a)给该图形窗口增加标题“微分代数方程仿真图形”;(b)给每个子窗口加坐标轴名称。
(3) 将tout,x1(t),,x2(t)和x3(t)中的数据分别保存到变量t,y1,y2和y3中,将这四个变量保存到st1_data.mat数据文件中。
(三)、子系统封装及仿真
(1)将图1中的PID Controller模型图在Simulink下封装成子系统;其中:


图1 PID Controller模型图
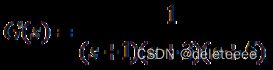
(2)将(1)中的子系统用在图2所示的仿真模型(保存到st2.mdl)中,在Simulink下调用ode45( )方法进行仿真求解单位阶跃响应y(t)(包括y(t)响应曲线和tout在0-20秒内的y(t)的值)。
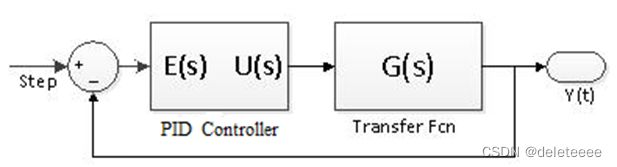
图2 PID控制系统仿真图
Kp=11.520,Ti=0.658,Td=0.164,Step为单位阶跃函数。如果仿真输出超调量过大,希望调整以上参数以获取更好的动态性能。
2. 过程
(一)、Lorenz模型
1. 建立脚本,采用四阶五级的(Runge-Kutta-Felhberg, RKF)方法,调用ode45()方法求解该方程;
脚本:
clear;
f=@(t,x)[-8*x(1)/3+x(2)*x(3);-10*x(2)+10*x(3);-x(1)*x(2)+28*x(2)-x(3)];
t=50;
x0=[0;0;1e-10];
[t,x]=ode45(f,[0,t],x0);
x1=x(:,1);
x2=x(:,2);
x3=x(:,3);
plot3(x1,x2,x3);%绘制相三维图
xlabel('x1(t)'),ylabel('x2(t)'),zlabel('x3(t)');
title('Lorenz模型的状态方程仿真图形');运行图形:
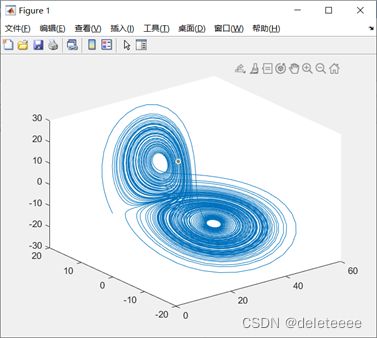
图3 Lorenz模型三维仿真图
2. Simulink仿真
Lorenz仿真模型:

图4 Lorenz仿真模型
设置相关属性:
形式改为数组形式

图5 修改为数组形式
调用ode45( )方法进行仿真求解x1(t), x2(t)和x3(t),仿真时间tout初值为0,终值为50
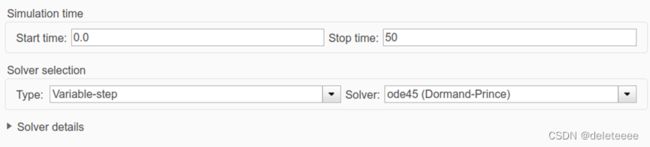
图6 修改方法以及时间
设置初值为![]()
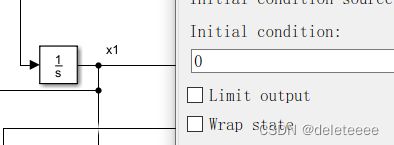
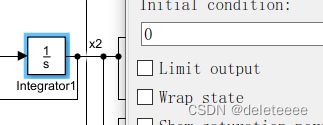

图7 修改x1,x2,x3初始值
脚本实现绘图保存数据等功能:
t=tout;
x1=yout(:,1);
x2=yout(:,2);
x3=yout(:,3);
subplot(2,2,1);%设置2*2四个子窗口
plot(t,x1);%绘制x1(t)曲线
xlabel('时间t'),ylabel('x1(t)');%设置坐标轴
subplot(2,2,2);
plot(t,x2);%绘制x2(t)曲线
xlabel('时间t'),ylabel('x2(t)');
subplot(2,2,3);
plot(t,x3);%绘制x3(t)曲线
xlabel('时间t'),ylabel('x3(t)');
subplot(2,2,4);
plot3(x1,x2,x3);%绘制相三维图
xlabel('x1(t)'),ylabel('x2(t)'),zlabel('x3(t)');
suptitle('Lorenz模型的状态方程仿真图形');
save st1_data t x1 x2 x3;%保存仿真图形

图8 Lorenz模型仿真图形
比较脚本和仿真的运行图形可以发现它们是有区别的
在脚本和仿真模型都运行过后,查看工作区:
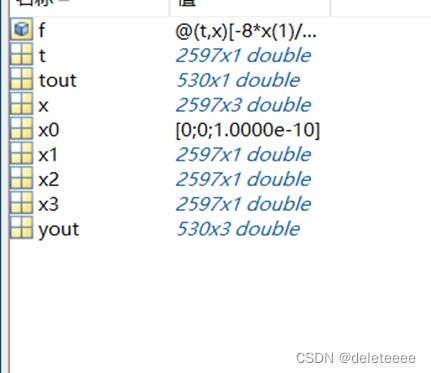
图9 工作区
可以发现,脚本中运行后时间和结果长度都是2597,而仿真中tout和yout长度都是530,这导致所绘制的图形有所不同,经过查阅得知可能与ode45为变步长算法有关,自动根据连续状态变化速度,来改变步长,但是具体原因还未弄清。但是可以验证它们的趋势一致,由此可见,ode45脚本解方程与仿真解方程两种方式都是没有问题的。
保存的数据文件st1_data.mat
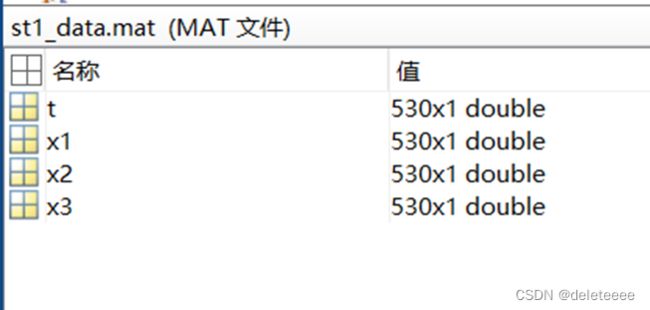
图10 保存的st1_data.mat文件
(二)微分方程
1. 建立脚本,采用刚性方程求解算法ode15()函数求解该方程;
脚本:
clear;
f=@(t,x)[-0.2*x(1)+x(2)*x(3)+0.3*x(1)*x(2);2*x(1)*x(2)-5*x(2)*x(3)-2*x(2)*x(2);x(1)+x(2)+x(3)-1];
A=[1 0 0;0 1 0;0 0 0];
options=odeset;
options.Mass=A;
x0=[0.8;0.1;0.1];
[t,x]=ode15s(f,[0 20],x0,options);
ph=plot(t,x);
xlabel('时间t'),ylabel('x(t)');
legend([ph(1),ph(2),ph(3)],'x1(t)','x2(t)','x3(t)');
suptitle('微分代数方程仿真图形');仿真图形:

图11 微分代数方程仿真图形
2. Simulink仿真
微分代数方程仿真模型:

图12 微分代数方程仿真模型
设置相关属性:
形式改为数组形式

图13 修改输出形式
调用ode15( )方法进行仿真求解x1(t), x2(t)和x3(t),仿真时间tout初值为0,终值为20

图14 修改调用方法以及时间
设置初值为![]() 。
。

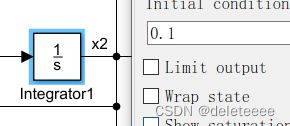

图15 修改初始值
脚本实现绘图保存数据等功能:
脚本:
t=tout;
x1=yout(:,1);
x2=yout(:,2);
x3=yout(:,3);
subplot(2,2,1);%设置2*2四个子窗口
plot(t,x1);%绘制x1(t)曲线
xlabel('时间t'),ylabel('x1(t)');%设置坐标轴
subplot(2,2,2);
plot(t,x2);%绘制x2(t)曲线
xlabel('时间t'),ylabel('x2(t)');
subplot(2,2,3);
plot(t,x3);%绘制x3(t)曲线
xlabel('时间t'),ylabel('x3(t)');
subplot(2,2,4);
ph=plot(t,yout);%绘制x(t)曲线
xlabel('时间t'),ylabel('x(t)');
legend([ph(1),ph(2),ph(3)],'x1(t)','x2(t)','x3(t)');
suptitle('微分代数方程仿真图形');
y1=x1;y2=x2;y3=x3;
save st1_data t y1 y2 y3;%保存仿真图形

图16 微分代数方程仿真图形
可以看出与ode15脚本所绘制图形一致,表明两种解代数方程的方法均有效实现
保存的数据文件st1_data.mat
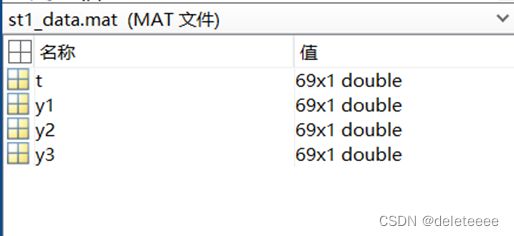
图17 保存的文件
(三)、子系统封装及仿真
(1)将图1中的PID Controller模型图在Simulink下封装成子系统

图18 子系统封装内部结构

图19 封装后
(2)将(1)中的子系统用在图2所示的仿真模型(保存到st2.mdl)中,在Simulink下调用ode45( )方法进行仿真求解单位阶跃响应y(t)(包括y(t)响应曲线和tout在0-20秒内的y(t)的值)。
G(s)值设置:
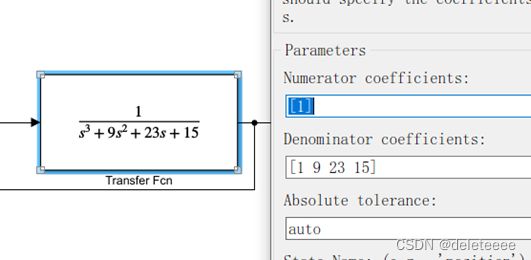
图20 设置G(s)值
仿真模型:

图21 仿真模型
鼠标右击simulink子系统mask如下图所示
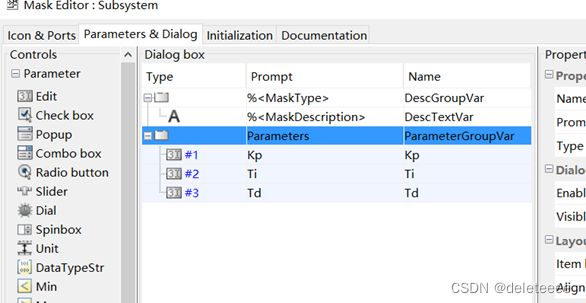
图22 创建mask
设置相关参数的值:
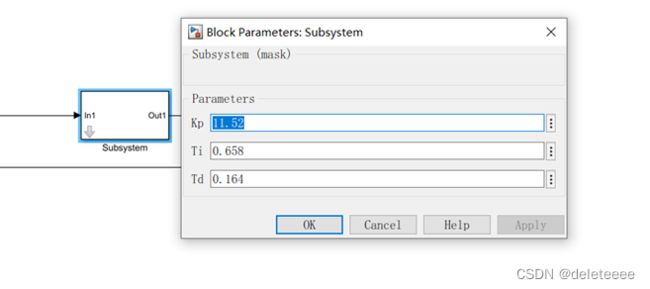
图23 修改参数初始值
设置起始到终止时间0-20,调用ode45

图24 修改方法以及时间
此时示波器中仿真图形:
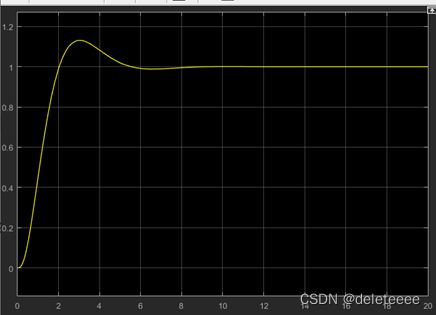
图25 Kp=11.52,Ti=0.658,Td=0.164
将Kp值减小为8,所的仿真图形:
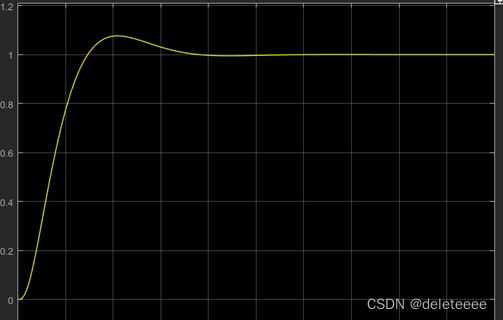
图26 Kp=8,Ti=0.658,Td=0.164
超调量减小
继续将Kp值减小为4,所的仿真图型如下:
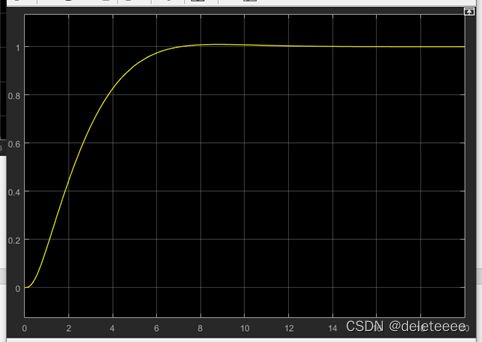
图27 Kp=4,Ti=0.658,Td=0.164
可以看出此时超调量几乎没有了,且曲线变得更加平缓
而若将Kp值升高为15:
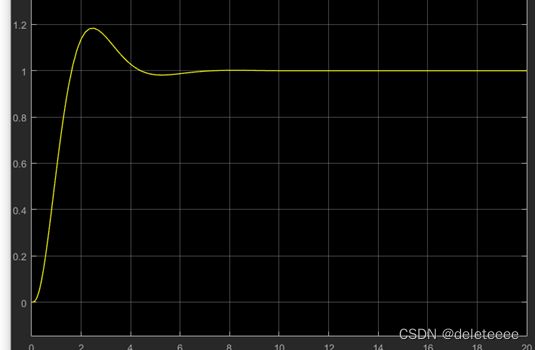
图28 Kp=15,Ti=0.658,Td=0.164
超调量将会增大,且曲线上升的趋势更加陡峭
保持Kp值为15不变,此时如果我们将Ti值增加到1:
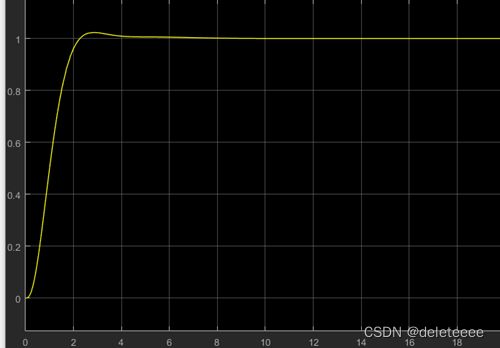
图29 Kp=11.52,Ti=1,Td=0.164
超调量明显减小,系统响应趋于稳态值的速度加快
此时继续升高Ti至1.5:
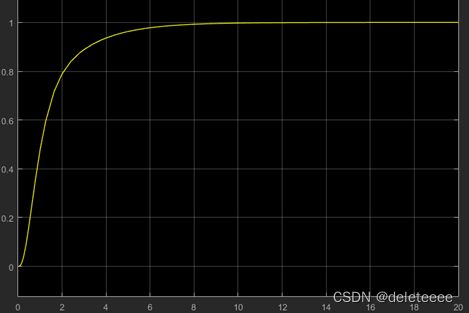
图30 Kp=11.52,Ti=1.5,Td=0.164
曲线无超调,初期曲线陡峭,然后快速平缓趋于稳态
将Ti减小至0.5:

图31 Kp=11.52,Ti=0.5,Td=0.164
曲线振荡,稳定性降低
此时,再将Td值增加至1:

图32 Kp=11.52,Ti=0.658,Td=1
曲线振荡减弱
而若将Td减少至0.5:
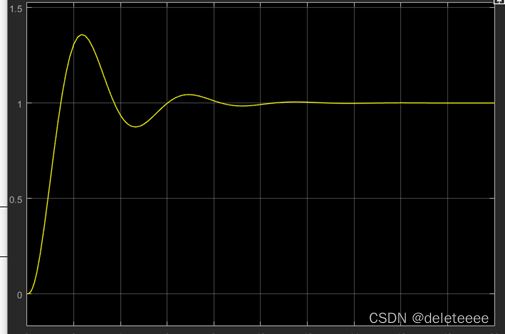
图33 Kp=11.52,Ti=0.658,Td=0.5
振荡幅度增加
3. 结果分析
通过上述过程分析可以发现,随着Kp的增大系统的响应速度越快,系统的调节精度越高,但是系统易产生超调,系统的稳定性变差,甚至会导致系统不稳定。Kp取值过小,调节精度降低,响应速度变慢,调节时间加长,使系统的动静态性能变坏。Ti可以消除系统的稳态误差。Ti越大系统的稳态误差消除的越快,但Ti如果过大,在响应过程的初期会产生积分饱和现象。若Ti过小,系统的稳态误差将难以消除,影响系统的调节精度,系统可能会更加不稳定,此时可以增加Td的值改善系统的动态性能,抑制响应过程中出现的振荡偏差,系统的抗干扰性能增强。