毕业设计:基于深度学习的车辆违停检测系统 人工智能 机器视觉 目标检测
目录
前言
项目背景
设计思路
数据集
模型训练
更多帮助
前言
大四是整个大学期间最忙碌的时光,一边要忙着备考或实习为毕业后面临的就业升学做准备,一边要为毕业设计耗费大量精力。近几年各个学校要求的毕设项目越来越难,有不少课题是研究生级别难度的,对本科同学来说是充满挑战。为帮助大家顺利通过和节省时间与精力投入到更重要的就业和考试中去,学长分享优质的选题经验和毕设项目与技术思路。
对毕设有任何疑问都可以问学长哦!
大家好,这里是海浪学长计算机毕设专题,本次分享的课题是
基于深度学习的车辆违停检测系统
项目背景
随着城市交通流量的增加,车辆违停问题日益突出,给交通管理和城市运行带来了许多挑战。传统的违停检测方法存在着准确性低和实时性差的问题。而采用深度学习技术,结合计算机视觉的方法,可以提高违停检测的准确性和实时性,为交通管理部门提供更可靠、高效的监测和执法手段。
设计思路
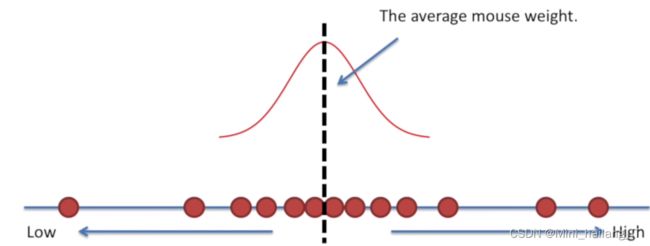
高斯模型,也称为正态分布或高斯分布,是统计学和工程领域中非常重要的分布模型。它在自然界中许多实际数据集中具有较好的适应性。高斯模型假设在特征空间中,数据点大多分布在某个均值附近,而远离均值的区域概率较低。通过高斯分布函数对特征数据进行量化表示,可以对像素灰度值进行建模,将图像的灰度直方图近似表示为灰度概率密度。当图像中目标区域和背景区域的灰度差异较大时,灰度直方图呈现双峰形状,其中一个波峰对应目标区域的中心灰度,另一个波峰对应背景区域的中心灰度。通过将直方图中的多个波峰模拟成多个高斯分布的求和,并考虑每个高斯分布的权重,可以解决图像中目标的分割问题。
在智能违停监控系统中,运动目标的检测是核心问题之一。在运动目标检测中,提取运动目标并将其与背景区分开是至关重要的。通过对当前帧图像进行背景差分,可以得到前景点,但由于噪声和干扰的存在,前景点可能会有空洞或碎片,影响后续的处理。因此,在差分后的二值化模型上进行形态学处理,如膨胀和腐蚀,对前景信息进行滤除加工。接下来,在监控区域中寻找运动目标时,可能存在多个目标,因此需要对二值化图像进行标记,分割出不同的目标。一种常用的分割方法是基于连通域的方法,通过从图像左上角开始遍历,确定第一个白色像素,然后向四周扩散寻找其他白色像素,直到找完所有连接在一起的白色像素点,将这块区域标记为一个目标。重复这个过程,直到遍历到图像右下角的像素点。
在对二值化图像进行目标分割时,通常采用连通域的方法。具体流程如下:从图像的左上角开始对整个图像进行遍历,找到第一个白色像素(像素值为1)作为起点。从该像素开始,向四周扩散,寻找与其相连的其他白色像素,直到找完所有连接在一起的白色像素点,将这个区域标记为一个目标。然后重复第一步,继续遍历,直到遍历到图像的右下角像素点。通过这个过程,可以将二值化图像分割成不同的目标区域。
# 读取二值化图像
image = cv2.imread('binary_image.png', 0)
# 连通域标记
_, labels, stats, centroids = cv2.connectedComponentsWithStats(image)
# 创建一个彩色图像用于可视化标记结果
output = np.zeros((image.shape[0], image.shape[1], 3), dtype=np.uint8)
# 遍历所有标记的连通域
for i in range(1, len(stats)):
# 获取连通域的面积
area = stats[i, cv2.CC_STAT_AREA]
# 过滤掉面积较小的连通域
if area > 100:
# 获取连通域的边界框坐标
x, y, width, height = stats[i, cv2.CC_STAT_LEFT], stats[i, cv2.CC_STAT_TOP], stats[i, cv2.CC_STAT_WIDTH], stats[i, cv2.CC_STAT_HEIGHT]
# 在输出图像上绘制连通域的边界框
cv2.rectangle(output, (x, y), (x + width, y + height), (0, 255, 0), 2)根据权重比的分布来判断像素是前景还是背景。当前景和背景的高斯模型数量不同时,需要设定一个阈值来决定哪些模型表示背景,哪些模型表示前景。较多的模型被用来模拟背景点,其余模型模拟前景点。阈值的选择需要权衡背景和前景模型的数量和性能表现。一般来说,阈值较大一些,使更多的模型来模拟背景点,但不能过大,以免将真正用于模拟前景点的高斯模型判定为背景模型,导致算法失效。在实际应用中,阈值一般设为中间值或接近中间值,根据具体场景进行微调。
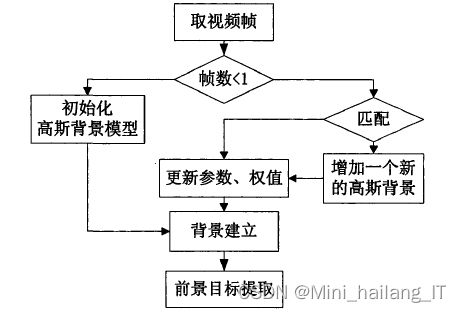
每次处理当前像素时,根据灰度值信息和各个模型的匹配情况进行判定。如果像素的灰度值与所有高斯模型都不匹配,说明出现了新的目标。此时需要初始化一个新的高斯模型来模拟该目标,并移除原有模型中排序最后的一个模型,保持模型数量不变。这样可以适应目标的动态变化和新目标的出现。
数据集
考虑到网络上没有现有合适的数据集可用,研究者亲自前往车辆违停场景进行拍摄,收集了丰富多样的照片。该数据集包含了不同场景下的车辆违停情况,并记录了违停车辆的位置信息。通过现场拍摄,研究者能够捕捉到真实的违停场景,为研究提供更准确、可靠的数据。相信这个自制的数据集将为车辆违停检测的研究提供有力的支持,为交通管理和城市安全方面的发展做出积极贡献。

数据扩展是一种重要的数据增强策略,用于通过各种技术手段增加数据集的数量和多样性。通过应用图像操作、噪声添加、亮度调整等技术,可以生成与原始数据具有相似特征但略有差异的样本。这样做的目的是提高深度学习模型的性能和泛化能力,使其能够更好地应对不同环境和变化。数据扩展可以帮助克服数据不足的问题,充分利用有限的数据资源,并提供更多的训练样本来训练更健壮的模型。
def data_augmentation(image, angle_range=(-10, 10), translation_range=(-10, 10), flip_prob=0.5):
# 随机旋转
angle = np.random.uniform(angle_range[0], angle_range[1])
height, width = image.shape[:2]
rotation_matrix = cv2.getRotationMatrix2D((width / 2, height / 2), angle, 1)
rotated_image = cv2.warpAffine(image, rotation_matrix, (width, height), flags=cv2.INTER_LINEAR)
# 随机平移
tx = np.random.uniform(translation_range[0], translation_range[1])
ty = np.random.uniform(translation_range[0], translation_range[1])
translation_matrix = np.float32([[1, 0, tx], [0, 1, ty]])
translated_image = cv2.warpAffine(rotated_image, translation_matrix, (width, height), flags=cv2.INTER_LINEAR)
# 随机翻转
flip_prob = np.random.uniform(0, 1)
if flip_prob < flip_prob:
flipped_image = cv2.flip(translated_image, 1) # 水平翻转
else:
flipped_image = translated_image
return flipped_image模型训练
模型训练的目的是通过深度学习使车辆违停检测系统具备自动化、高准确性、高效率和良好的泛化能力。通过大量标注的数据,模型能够学习到输入数据的特征和模式,并对新数据进行准确的预测或分类。这样的系统能够提高交通管理的效率,减轻人工负担,并为长期的安全和可持续发展提供支持。基本的模型训练流程:
- 数据收集和标注:首先需要收集大量的包含违停和非违停场景的车辆图像数据。这些数据应该涵盖各种不同的场景、天气和光照条件。然后,需要对这些图像进行标注,标明哪些是违停车辆,哪些不是。
- 数据预处理:对收集到的图像数据进行预处理,包括图像的大小调整、归一化、增强和数据增强等操作。数据增强可以通过旋转、平移、缩放、翻转等方式来增加数据样本的多样性,提高模型的泛化能力。
- 构建CNN模型:基于深度学习框架(如TensorFlow、PyTorch等),构建一个适合车辆违停检测任务的CNN模型。常用的模型包括AlexNet、VGG、ResNet、MobileNet等。可以使用预训练的模型作为基础网络,也可以从头开始训练一个新的模型。
- 模型训练:使用标注好的数据集对CNN模型进行训练。训练过程中,通过反向传播算法和优化器(如SGD、Adam等)来不断调整模型的权重和参数,使其能够准确地判断车辆是否违停。
- 模型评估和调优:训练完成后,使用验证集或测试集对模型进行评估,计算准确率、召回率、F1值等指标。根据评估结果,可以调整模型结构、超参数和训练策略,进一步提升模型性能。
- 模型部署:在模型训练达到满意的性能后,可以将模型部署到实际的车辆违停检测系统中。部署可以是将模型集成到移动设备、嵌入式系统或云服务器中,以便实时进行违停检测。
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(model.parameters(), lr=0.001)
# 加载训练数据
train_dataset = YourDataset(train_data, train_labels) # 自定义训练数据集
train_loader = DataLoader(train_dataset, batch_size=32, shuffle=True)
# 开始训练
num_epochs = 10
for epoch in range(num_epochs):
model.train()
running_loss = 0.0
for images, labels in train_loader:
# 将数据加载到设备上(如GPU)
images = images.to(device)
labels = labels.to(device)
# 清零梯度
optimizer.zero_grad()
# 前向传播
outputs = model(images)
# 计算损失
loss = criterion(outputs, labels)
# 反向传播和优化
loss.backward()
optimizer.step()
running_loss += loss.item()
# 打印训练损失
print(f"Epoch [{epoch+1}/{num_epochs}], Loss: {running_loss / len(train_loader)}")
# 在验证集上评估模型
model.eval()
with torch.no_grad():
correct = 0
total = 0
for images, labels in validation_loader:
# 将数据加载到设备上(如GPU)
images = images.to(device)
labels = labels.to(device)
# 前向传播
outputs = model(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
accuracy = 100 * correct / total
print(f"Validation Accuracy: {accuracy}%")