【基于xilinx Zynq7000的PYNQ框架项目】03 Socket实现开发板和电脑的实时视频传输并存储图片
03 socket实现实时视频流传输并保存
- 前言
- 一、服务器端代码
- 二、客户端代码
- 三、运行
- 总结
前言
主机摄像头获取实时视频流,需要传输到开发板上并实时保存更新,才能使用开发板上的人脸识别模型进行人脸检测。本篇文章通过 socket 实现主机与 ZYNQ_MINI 开发板之间的数据传输。
一、服务器端代码
承接本项目系列的上一篇文章 【基于Xilinx Zynq7000的PYNQ框架项目】02 PYNQ镜像制作 ,使用 PYNQ 提供的 jupyter notebook 来写服务器端代码(意思是开发板作为服务器端):
import socket
import struct
import threading
import cv2
import numpy
import os
class Server:
def __init__(self):
# 设置tcp服务端的socket
self.server = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
# 设置重复使用
self.server.setsockopt(socket.SOL_SOCKET, socket.SO_REUSEADDR, True)
# 绑定地址和端口,此处的IP地址为开发板的IP,端口号可以随意设置,只要不跟已占用的端口号冲突
self.server.bind(('192.168.137.80', 11000))
# 设d置被动监听
self.server.listen(128)
def run(self):
while True:
# 等待客户端连接
print('等待客户端连接')
client, addr = self.server.accept()
ProcessClient(client).start()
class ProcessClient(threading.Thread):
def __init__(self, client):
super().__init__()
self.client = client
# 以下内容作用是根据文件夹的图片序号规定'i'的初值,方便下一次保存图片时使用
self.i=0
path = "home/xilinx/jupyter_notebooks/VideoFlows" # 设置传输过来的视频流在开发板上的存储路径
file_list = []
for file in file_list:
file = int(file.split('.')[0])
file_list.append(file)
if len(file_list) == 0:
self.i = 0
else:
file_list.sort()
self.i = file_list[-1] + 1
def run(self):
while True:
data = self.client.recv(8) # 此处的接收大小 " 8 " 是跟客户端(电脑)传输的数据包大小对应的
if not data:
break
length, width, height = struct.unpack('ihh', data) # 图片的长、宽、高
# 接收二进制形式的图片数据
imgg = b''
while length:
temp_size = self.client.recv(length)
length -= len(temp_size)
imgg += temp_size
# 还原二进制图片数据成一维数组形式
data = numpy.fromstring(imgg, dtype='uint8')
# 最终还原成矩阵形式
image = cv2.imdecode(data, cv2.IMREAD_UNCHANGED)
# 存储每帧图片,以10张为一组进行循环存储,编号为 0 到 9
cv2.imwrite(r"/home/xilinx/jupyter_notebooks/VideoFlows/" + str(self.i) + ".jpg", image)
self.i = self.i + 1
if self.i == 10:
self.i = 0
# time.sleep(5)
if __name__ == '__main__':
server = Server()
server.run()
注释已经写得比较详细,这里就不再讲述代码了。
二、客户端代码
在自己的笔记本电脑上写客户端代码:
import socket
import struct
import time
import traceback
import cv2
import numpy
import sys
class Client(object):
def __init__(self, addr_port=('192.168.137.80', 11000)):
# 连接的服务器的地址和端口号
self.addr_port = addr_port
# 创建套接字
self.client = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
# 地址端口可以复用
self.client.setsockopt(socket.SOL_SOCKET, socket.SO_REUSEADDR, 1)
# 视频的分辨率
self.resolution = (640, 480)
def connect(self):
try:
self.client.connect(self.addr_port)
return True
except Exception as e:
traceback.print_exc() # 打印原始的异常信息
print('连接失败')
return False
def send2server(self):
camera = cv2.VideoCapture(0) # 获取摄像头
print('isOpened:', camera.isOpened())
while camera.isOpened():
try:
# 读取摄像头的数据
ret, frame = camera.read()
# 对每一帧图片做大小的处理和压缩
frame = cv2.resize(frame, self.resolution)
# cv2.imencode(图片后缀名,原图片的数据,图片质量 可选范围为0-100 )
# 图片质量需合理设置,太大传得慢,太小画面不清晰
ret, img = cv2.imencode('.jpg', frame, [cv2.IMWRITE_JPEG_QUALITY, 20])
print(img)
print('-------------')
print(img.tobytes())
# 转换为numpy格式数据
img_code = numpy.array(img)
# 转为二进制数据
img = img_code.tobytes()
# 获取数据长度
length = len(img)
# 发送的数据 大小 宽 高 图片数据
# 数据打包变为二进制
# pack方法参数1 指定打包数据的数据大小 i 4字节 h代表2字节
# 【ihh】数据包的大小,i代表4字节,h代表2字节;【length】数据长度;【】后两个为长、宽;【img】图片数据
all_data = struct.pack('ihh', length, self.resolution[0], self.resolution[1]) + img
self.client.send(all_data)
# 传输间隔需合理设置,太小时延太高,太大帧数太低
time.sleep(0.5)
except:
camera.release() # 释放摄像头
traceback.print_exc()
return
if __name__ == '__main__':
client = Client()
if client.connect():
client.send2server()
注释已经写得比较详细,这里就不再讲述代码了。
三、运行
在 MobaXterm 串口终端上运行服务器端代码 server.py :

在笔记本电脑上运行客户端代码 main.py ,显示的打印内容如下:

在MobaXterm 上打开自己设置的视频流存放目录(在 server.py 代码里输入的那个路径):
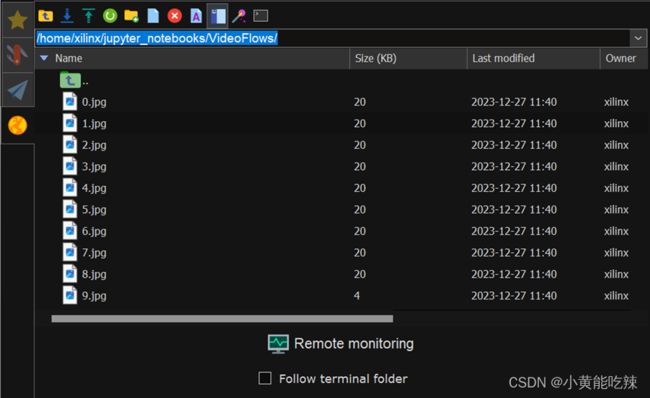
可以看到各图片的最后修改时间会实时发生变化 ,说明成功接收到笔记本电脑的视频流。所谓视频流,其实就是足够多的图片在足够短的时间内播放。
总结
本文章实现了将笔记本摄像头视频流传输到开发板上,开发板接收并存储到本地目录下。下一步就是导入每帧图片进行人脸检测啦~
有不清楚的地方,欢迎大家在评论区交流~
您的关注、点赞与收藏,是我持续创作优质博客的最大动力!
本项目系列文章:
【基于Xilinx ZYNQ7000的PYNQ框架项目】01人脸识别项目介绍与展示
【基于Xilinx Zynq7000的PYNQ框架项目】02 PYNQ镜像制作
【基于Xilinx ZYNQ7000的PYNQ框架项目】04开发板上运行人脸识别模型
【基于Xilinx ZYNQ7000的PYNQ框架项目】05使用Overlay库和python父子进程实现开发板按键控制LED灯流水或熄灭
更多优质博客:小黄能吃辣的CSDN主页