相机图像质量概述
前言:
对很多刚入行做camera tuning的小伙伴来说,可能对图像质量还不是很了解,包括我自己刚开始接触这一行的时候也是一样,不清楚ISP是什么,为什么要调它,影响画质的因素又有哪些,哪些是ISP能调的,哪些又不能调的,所以本文主要是从概念上简单介绍下图像质量,从图像质量介绍、成像系统介绍、影响图像质量的典型因素举例,三块内容来概述的,希望对刚入行的小伙伴有所帮助,可以加深一下对图像质量的理解;
目录
1、图像质量介绍
1-1、成像产品的分类
1-2、图像质量分类
1-3、成像产品的图像质量要求
2、成像系统介绍
2-1、成像系统组成
2-2、成像系统的两条基本主线
2-3、成像系统的实时控制
3、影响图像质量的典型因素举例
3-1、光学及镜头、IR相关的图像质量问题
3-2、CMOS Sensor 相关的图像质量问题
3-3、ISP 相关的图像质量问题
3-4、Encoder 相关的图像质量问题
3-5、显示相关的图像质量问题
1、图像质量介绍
1-1、成像产品的分类

1-2、图像质量分类
-
审美型 ( 人眼评判 )
no artefacts ! color,noise,detail,focus speed、etc
-
信息型( 机器识别、检测 )
fast,no information lost,visibility,certain level tolerace to artefacts、etc
-
根据图像质量需求的成像产品分类

1-3、成像产品的图像质量要求
审美类成像产品的图像质量要求
-
单反相机 -- 真实的还原现实世界,需要遵循一定的客观成像标准CIPA,ISO,如有艺术创作的需要可以用PS等软件对照片进行后处理;
-
手机相机 -- 偏向于人眼视觉,对人/人脸的拍摄有一定要求;
-
无人机/ 运动相机 -- 视频的稳定性(防抖、不允许画面突变),对人/人脸的拍摄有一定要求;
-
监控相机 -- 低照度噪声(时域,空域)、HDR、高锐度、对人/人脸的拍摄有一定要求;
信息类成像产品的图像质量要求
-
机器视觉相机 -- 人/人脸、 高感光度;
-
Home Camera -- 家用相机,和监控相机类似,对人脸识别有一定要求;
-
车载相机 -- 高动态范围、高感光度、高帧率、motion artefacts、stitching artifacts、满足一定的人眼视觉(有前视/后视的摄像头是人眼来看的);
2、成像系统介绍
2-1、成像系统组成

-
要理解图像质量,就必须要了解整个成像系统的组成,搞清楚整个成像系统中有哪些模块会影响图像质量,如上以成像过程来描述,光源(包含人造光、自然光、闪光灯)照到物体上,光线反射进入成像系统,经过镜头(对于变焦镜头有驱动马达调整镜片位置,实现变焦)、光圈、滤光片、快门到达Sensor上成像,接着出来数字信号传到ISP进行图像处理,ISP输出YUV格式的数据,用于显示或者经过编码后进行存储,又或者用于机器视觉;所以影响图像质量的因素有很多,包括光源、镜头、滤光片、Sensor、ISP、显示器的显示、编码 ........
-
理解一下就是光源、镜头、光圈、滤光片、快门、Sensor构成了一个完整的光学成像系统,但由于光学和半导体的缺陷与局限会导致成像的一系列问题,就需要经过ISP,用数字信号处理的方法去克服光学,半导体的缺陷导致的成像问题,处理完并得到较好的图像后,就用来进行图像的显示、存储、或者机器视觉的检测识别等应用;
-
总结:整个成像系统是一个软硬结合、光机电结合的复杂系统,做有些系统架构和硬件架构的人,有必要了解整个系统,才能够设计出正确的架构,包括做图像质量的也是从系统角度去处理问题,同样要了解整个系统,才能更好的完成工作;
2-2、成像系统的两条基本主线
图像重建 --- 清晰勾画出正确的景物( 图像重建的过程,就是用数字信号处理的方法去克服光学、半导体的缺陷,清晰勾画出正确的景物 )
-
光学缺陷与局限: MTF、像差、场曲、vignetting(光晕,暗角)/luma shading(亮度阴影)、glare(眩光)、Geometry Distortion(几何失真)
-
半导体缺陷与局限:defect pixel、sensitivity、dynamic range、noise:temperal noise、fix pattern noise、color noise、spatial noise
色彩重建 --- 还原出准确丰富的色彩 ( 有时还要符合人们主观倾向的色彩 )
-
光学缺陷与局限:Color shading、chromatic aberration、purple fringe
-
半导体缺陷与局限:Cross talk、balck level
2-3、成像系统的实时控制
一般从硬件厂商那边拿到的相同产品,成像效果都是差不多的,所以要有更好的用户体验就必须在软件上面增加自己的优化,如3A算法、后处理算法;
-
系统的静态参数:black level、shading、noise profile、white balance、chromatic aberration correction
-
AE\AWB\AF(自动曝光、自动白平衡、自动对焦):达到曝光/白平衡/对焦的“快”、“准”、“稳”
-
系统的动态参数:shading,CCM, black level,noise reduction,sharpening
3、影响图像质量的典型因素举例
3-1、光学及镜头、IR相关的图像质量问题
-
畸变


-
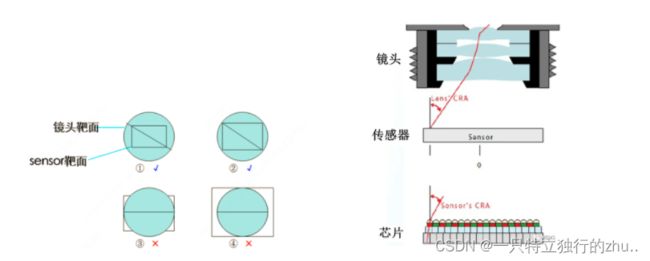
luma shading

-
color shading



-
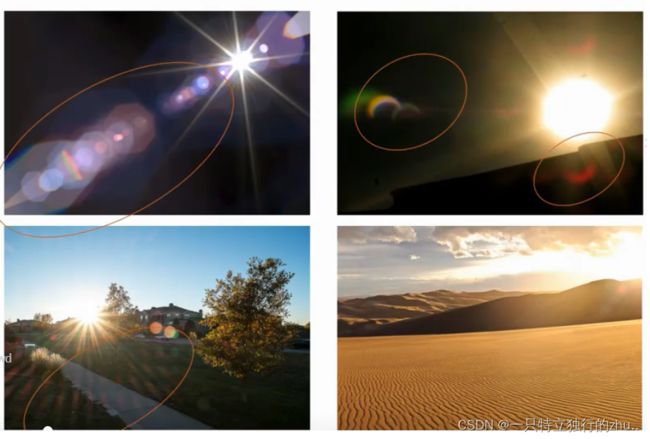
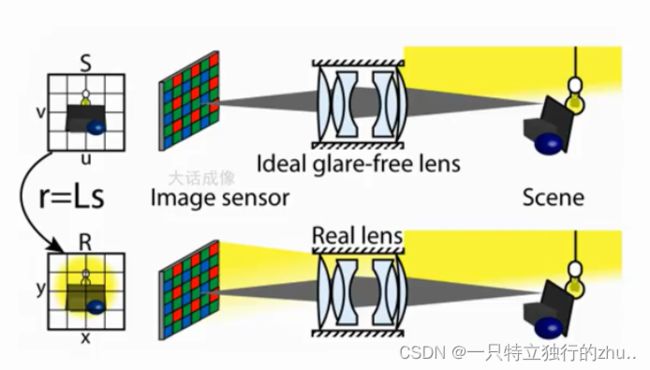
眩光、鬼影

-
紫边


3-2、CMOS Sensor 相关的图像质量问题
-
坏点
-
噪声(Fix pattern noise 、热噪)

-
sensor filp/mirror
3-3、ISP 相关的图像质量问题
-
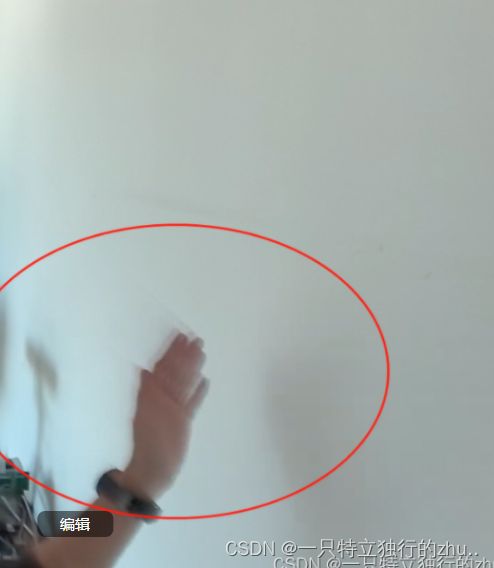
运动拖影





3-4、Encoder 相关的图像质量问题
-
mosaic

-
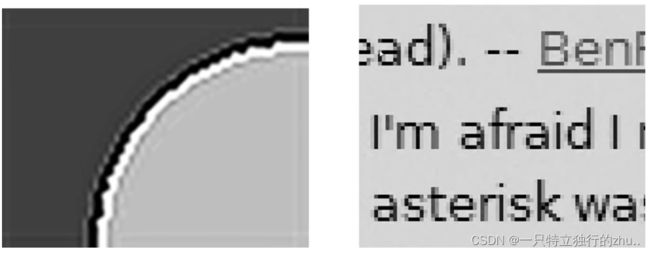
ringing (震铃)
-
contouring

-
blurry(模糊)

-
mosquito (蚊子噪声)

3-5、显示相关的图像质量问题
-
电视的PQ( Picture-Quality)会导致Camera 显示效果不一致(亮度、色彩、噪声等方面);
-
显示器色域、色准差异会导致Camera 显示效果不一致;



