【lesson11】高并发内存池性能优化
文章目录
- 高并发内存池性能问题
- 基数树优化性能
-
- 代码
-
- 一层基数树
- 两层基数树
- 三层基数树
- 一层基数树替代map
-
- PageCache.h
- PageCache.cpp
- 基数树线程安全的原因
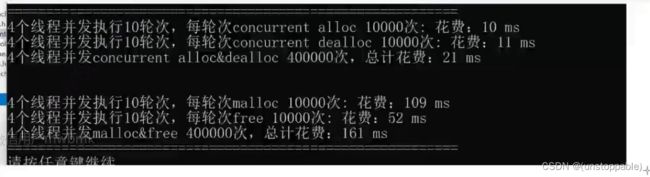
高并发内存池性能问题
我们知道,我们实现的高并发内存池存在大量的申请锁和,释放锁,而这样就会导致我们的性能比不上原来的malloc。
性能分析:

通过报告,我们发现性能差的很大原因是因为MapObjectToSpan。
而MapObjectToSpan耗费性能的原因是因为锁的问题,频繁的申请锁和释放锁会很耗费性能。
// 获取从对象到span的映射
Span* PageCache::MapObjectToSpan(void* obj)
{
PAGE_ID id = ((PAGE_ID)obj >> PAGE_SHIFT);
std::unique_lock<std::mutex> lock(_pageMtx);
auto ret = _idSpanMap.find(id);
if (ret != _idSpanMap.end())
{
return ret->second;
}
else
{
assert(false);
return nullptr;
}
}
而这是我们就要对其进行优化,我们查看tcmalloc发现,他用一个叫基数树的数据结构解决了这方面的问题。
基数树也是存储id和span的映射关系。
基数树优化性能
代码
一层基数树
#pragma once
#include"Common.h"
// Single-level array
template <int BITS>
class TCMalloc_PageMap1 {
private:
static const int LENGTH = 1 << BITS;
void** array_;
public:
typedef uintptr_t Number;
//explicit TCMalloc_PageMap1(void* (*allocator)(size_t)) {
explicit TCMalloc_PageMap1() {
//array_ = reinterpret_cast((*allocator)(sizeof(void*) << BITS));
size_t size = sizeof(void*) << BITS;
size_t alignSize = SizeClass::_RoundUp(size, 1<<PAGE_SHIFT);
array_ = (void**)SystemAlloc(alignSize>>PAGE_SHIFT);
memset(array_, 0, sizeof(void*) << BITS);
}
// Return the current value for KEY. Returns NULL if not yet set,
// or if k is out of range.
void* get(Number k) const {
if ((k >> BITS) > 0) {
return NULL;
}
return array_[k];
}
// REQUIRES "k" is in range "[0,2^BITS-1]".
// REQUIRES "k" has been ensured before.
//
// Sets the value 'v' for key 'k'.
void set(Number k, void* v) {
array_[k] = v;
}
};
一层基数树,是在映射之前直接开辟219个指针大小的空间。
所以每个位置都能存储指针,而要存的_pageid直接映射到桶对应的下标处。

两层基数树
#pragma once
#include"Common.h"
// Two-level radix tree
template <int BITS>
class TCMalloc_PageMap2 {
private:
// Put 32 entries in the root and (2^BITS)/32 entries in each leaf.
static const int ROOT_BITS = 5;
static const int ROOT_LENGTH = 1 << ROOT_BITS;
static const int LEAF_BITS = BITS - ROOT_BITS;
static const int LEAF_LENGTH = 1 << LEAF_BITS;
// Leaf node
struct Leaf {
void* values[LEAF_LENGTH];
};
Leaf* root_[ROOT_LENGTH]; // Pointers to 32 child nodes
void* (*allocator_)(size_t); // Memory allocator
public:
typedef uintptr_t Number;
//explicit TCMalloc_PageMap2(void* (*allocator)(size_t)) {
explicit TCMalloc_PageMap2() {
//allocator_ = allocator;
memset(root_, 0, sizeof(root_));
PreallocateMoreMemory();
}
void* get(Number k) const {
const Number i1 = k >> LEAF_BITS;
const Number i2 = k & (LEAF_LENGTH - 1);
if ((k >> BITS) > 0 || root_[i1] == NULL) {
return NULL;
}
return root_[i1]->values[i2];
}
void set(Number k, void* v) {
const Number i1 = k >> LEAF_BITS;
const Number i2 = k & (LEAF_LENGTH - 1);
ASSERT(i1 < ROOT_LENGTH);
root_[i1]->values[i2] = v;
}
bool Ensure(Number start, size_t n) {
for (Number key = start; key <= start + n - 1;) {
const Number i1 = key >> LEAF_BITS;
// Check for overflow
if (i1 >= ROOT_LENGTH)
return false;
// Make 2nd level node if necessary
if (root_[i1] == NULL) {
//Leaf* leaf = reinterpret_cast((*allocator_)(sizeof(Leaf)));
//if (leaf == NULL) return false;
static ObjectPool<Leaf> leafPool;
Leaf* leaf = (Leaf*)leafPool.New();
memset(leaf, 0, sizeof(*leaf));
root_[i1] = leaf;
}
// Advance key past whatever is covered by this leaf node
key = ((key >> LEAF_BITS) + 1) << LEAF_BITS;
}
return true;
}
void PreallocateMoreMemory() {
// Allocate enough to keep track of all possible pages
Ensure(0, 1 << BITS);
}
};
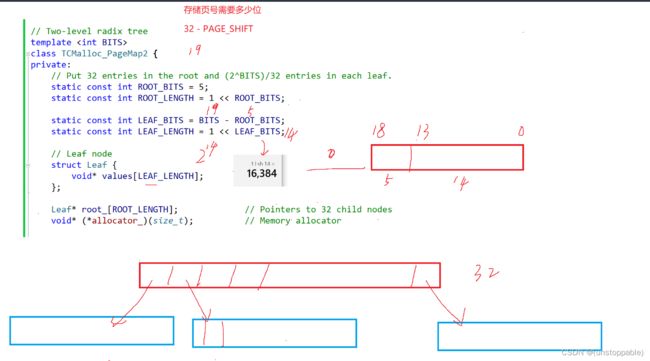
两层基数树和一层基数树,有所不同,
一层基数树是直接无脑开219个指针大小的空间,无论存不存在映射关系或,也不管映射关系的多与少。
而两层基数树则是先开25个指针大小的空间
然后这时如果有映射关系,要插入其中,我们再开辟219-5个指针大小的空间也就是214个。

这样我们就比之前节省了一些空间。
三层基数树
#pragma once
#include"Common.h"
// Three-level radix tree
template <int BITS>
class TCMalloc_PageMap3 {
private:
// How many bits should we consume at each interior level
static const int INTERIOR_BITS = (BITS + 2) / 3; // Round-up
static const int INTERIOR_LENGTH = 1 << INTERIOR_BITS;
// How many bits should we consume at leaf level
static const int LEAF_BITS = BITS - 2 * INTERIOR_BITS;
static const int LEAF_LENGTH = 1 << LEAF_BITS;
// Interior node
struct Node {
Node* ptrs[INTERIOR_LENGTH];
};
// Leaf node
struct Leaf {
void* values[LEAF_LENGTH];
};
Node* root_; // Root of radix tree
void* (*allocator_)(size_t); // Memory allocator
Node* NewNode() {
Node* result = reinterpret_cast<Node*>((*allocator_)(sizeof(Node)));
if (result != NULL) {
memset(result, 0, sizeof(*result));
}
return result;
}
public:
typedef uintptr_t Number;
explicit TCMalloc_PageMap3(void* (*allocator)(size_t)) {
allocator_ = allocator;
root_ = NewNode();
}
void* get(Number k) const {
const Number i1 = k >> (LEAF_BITS + INTERIOR_BITS);
const Number i2 = (k >> LEAF_BITS) & (INTERIOR_LENGTH - 1);
const Number i3 = k & (LEAF_LENGTH - 1);
if ((k >> BITS) > 0 ||
root_->ptrs[i1] == NULL || root_->ptrs[i1]->ptrs[i2] == NULL) {
return NULL;
}
return reinterpret_cast<Leaf*>(root_->ptrs[i1]->ptrs[i2])->values[i3];
}
void set(Number k, void* v) {
ASSERT(k >> BITS == 0);
const Number i1 = k >> (LEAF_BITS + INTERIOR_BITS);
const Number i2 = (k >> LEAF_BITS) & (INTERIOR_LENGTH - 1);
const Number i3 = k & (LEAF_LENGTH - 1);
reinterpret_cast<Leaf*>(root_->ptrs[i1]->ptrs[i2])->values[i3] = v;
}
bool Ensure(Number start, size_t n) {
for (Number key = start; key <= start + n - 1;) {
const Number i1 = key >> (LEAF_BITS + INTERIOR_BITS);
const Number i2 = (key >> LEAF_BITS) & (INTERIOR_LENGTH - 1);
// Check for overflow
if (i1 >= INTERIOR_LENGTH || i2 >= INTERIOR_LENGTH)
return false;
// Make 2nd level node if necessary
if (root_->ptrs[i1] == NULL) {
Node* n = NewNode();
if (n == NULL) return false;
root_->ptrs[i1] = n;
}
// Make leaf node if necessary
if (root_->ptrs[i1]->ptrs[i2] == NULL) {
Leaf* leaf = reinterpret_cast<Leaf*>((*allocator_)(sizeof(Leaf)));
if (leaf == NULL) return false;
memset(leaf, 0, sizeof(*leaf));
root_->ptrs[i1]->ptrs[i2] = reinterpret_cast<Node*>(leaf);
}
// Advance key past whatever is covered by this leaf node
key = ((key >> LEAF_BITS) + 1) << LEAF_BITS;
}
return true;
}
void PreallocateMoreMemory() {
}
};
和两次思路一样。
这里我们只使用一层基数树代替map。其余有兴趣自己实现。
一层基数树替代map
用到存储map映射关系,和查找map映射关系的函数,都只在Page Cache中,所以我们只在Page Cache中修改即可。
PageCache.h
#pragma once
#include "Common.h"
#include "ObjectPool.h"
#include "PageMap.h"
class PageCache
{
public:
static PageCache* GetInstance()
{
return &_sInst;
}
// 获取从对象到span的映射
Span* MapObjectToSpan(void* obj);
// 释放空闲span回到Pagecache,并合并相邻的span
void ReleaseSpanToPageCache(Span* span);
// 获取一个K页的span
Span* NewSpan(size_t k);
std::mutex _pageMtx;
private:
SpanList _spanLists[NPAGES];
ObjectPool<Span> _spanPool;
//std::unordered_map _idSpanMap;
//std::map _idSpanMap;
TCMalloc_PageMap1<32 - PAGE_SHIFT> _idSpanMap;
PageCache()
{}
PageCache(const PageCache&) = delete;
static PageCache _sInst;
};
PageCache.cpp
#include "PageCache.h"
PageCache PageCache::_sInst;
// 获取一个K页的span
Span* PageCache::NewSpan(size_t k)
{
assert(k > 0);
// 大于128 page的直接向堆申请
if (k > NPAGES-1)
{
void* ptr = SystemAlloc(k);
//Span* span = new Span;
Span* span = _spanPool.New();
span->_pageId = (PAGE_ID)ptr >> PAGE_SHIFT;
span->_n = k;
//_idSpanMap[span->_pageId] = span;
_idSpanMap.set(span->_pageId, span);
return span;
}
// 先检查第k个桶里面有没有span
if (!_spanLists[k].Empty())
{
Span* kSpan = _spanLists[k].PopFront();
// 建立id和span的映射,方便central cache回收小块内存时,查找对应的span
for (PAGE_ID i = 0; i < kSpan->_n; ++i)
{
//_idSpanMap[kSpan->_pageId + i] = kSpan;
_idSpanMap.set(kSpan->_pageId + i, kSpan);
}
return kSpan;
}
// 检查一下后面的桶里面有没有span,如果有可以把他它进行切分
for (size_t i = k+1; i < NPAGES; ++i)
{
if (!_spanLists[i].Empty())
{
Span* nSpan = _spanLists[i].PopFront();
//Span* kSpan = new Span;
Span* kSpan = _spanPool.New();
// 在nSpan的头部切一个k页下来
// k页span返回
// nSpan再挂到对应映射的位置
kSpan->_pageId = nSpan->_pageId;
kSpan->_n = k;
nSpan->_pageId += k;
nSpan->_n -= k;
_spanLists[nSpan->_n].PushFront(nSpan);
// 存储nSpan的首位页号跟nSpan映射,方便page cache回收内存时
// 进行的合并查找
//_idSpanMap[nSpan->_pageId] = nSpan;
//_idSpanMap[nSpan->_pageId + nSpan->_n - 1] = nSpan;
_idSpanMap.set(nSpan->_pageId, nSpan);
_idSpanMap.set(nSpan->_pageId + nSpan->_n - 1, nSpan);
// 建立id和span的映射,方便central cache回收小块内存时,查找对应的span
for (PAGE_ID i = 0; i < kSpan->_n; ++i)
{
//_idSpanMap[kSpan->_pageId + i] = kSpan;
_idSpanMap.set(kSpan->_pageId + i, kSpan);
}
return kSpan;
}
}
// 走到这个位置就说明后面没有大页的span了
// 这时就去找堆要一个128页的span
//Span* bigSpan = new Span;
Span* bigSpan = _spanPool.New();
void* ptr = SystemAlloc(NPAGES - 1);
bigSpan->_pageId = (PAGE_ID)ptr >> PAGE_SHIFT;
bigSpan->_n = NPAGES - 1;
_spanLists[bigSpan->_n].PushFront(bigSpan);
return NewSpan(k);
}
Span* PageCache::MapObjectToSpan(void* obj)
{
PAGE_ID id = ((PAGE_ID)obj >> PAGE_SHIFT);
/*std::unique_lock lock(_pageMtx);
auto ret = _idSpanMap.find(id);
if (ret != _idSpanMap.end())
{
return ret->second;
}
else
{
assert(false);
return nullptr;
}*/
auto ret = (Span*)_idSpanMap.get(id);
assert(ret != nullptr);
return ret;
}
void PageCache::ReleaseSpanToPageCache(Span* span)
{
// 大于128 page的直接还给堆
if (span->_n > NPAGES-1)
{
void* ptr = (void*)(span->_pageId << PAGE_SHIFT);
SystemFree(ptr);
//delete span;
_spanPool.Delete(span);
return;
}
// 对span前后的页,尝试进行合并,缓解内存碎片问题
while (1)
{
PAGE_ID prevId = span->_pageId - 1;
//auto ret = _idSpanMap.find(prevId);
前面的页号没有,不合并了
//if (ret == _idSpanMap.end())
//{
// break;
//}
auto ret = (Span*)_idSpanMap.get(prevId);
if (ret == nullptr)
{
break;
}
// 前面相邻页的span在使用,不合并了
Span* prevSpan = ret;
if (prevSpan->_isUse == true)
{
break;
}
// 合并出超过128页的span没办法管理,不合并了
if (prevSpan->_n + span->_n > NPAGES-1)
{
break;
}
span->_pageId = prevSpan->_pageId;
span->_n += prevSpan->_n;
_spanLists[prevSpan->_n].Erase(prevSpan);
//delete prevSpan;
_spanPool.Delete(prevSpan);
}
// 向后合并
while (1)
{
PAGE_ID nextId = span->_pageId + span->_n;
/*auto ret = _idSpanMap.find(nextId);
if (ret == _idSpanMap.end())
{
break;
}*/
auto ret = (Span*)_idSpanMap.get(nextId);
if (ret == nullptr)
{
break;
}
Span* nextSpan = ret;
if (nextSpan->_isUse == true)
{
break;
}
if (nextSpan->_n + span->_n > NPAGES-1)
{
break;
}
span->_n += nextSpan->_n;
_spanLists[nextSpan->_n].Erase(nextSpan);
//delete nextSpan;
_spanPool.Delete(nextSpan);
}
_spanLists[span->_n].PushFront(span);
span->_isUse = false;
//_idSpanMap[span->_pageId] = span;
//_idSpanMap[span->_pageId+span->_n-1] = span;
_idSpanMap.set(span->_pageId, span);
_idSpanMap.set(span->_pageId + span->_n - 1, span);
}
基数树线程安全的原因
为什么基数树是线程安全的不用加锁?

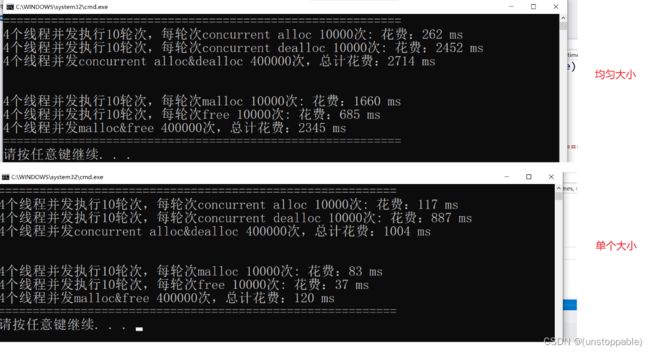
Realese下再次对比性能: