基于单片机PID算法的恒温控制系统仿真与程序源码设计(DS18B20传感器)实物图、仿真工程、源代码
基于单片机PID算法的恒温控制系统仿真与程序源码设计(DS18B20传感器)
源代码
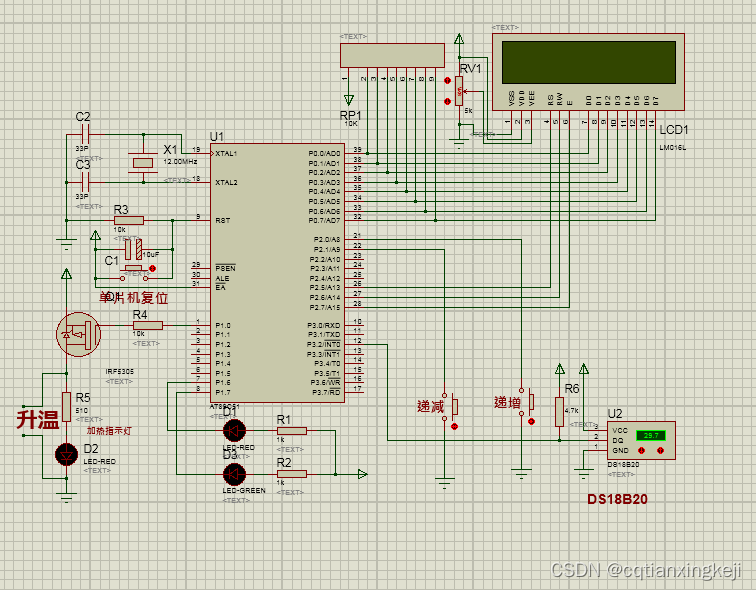
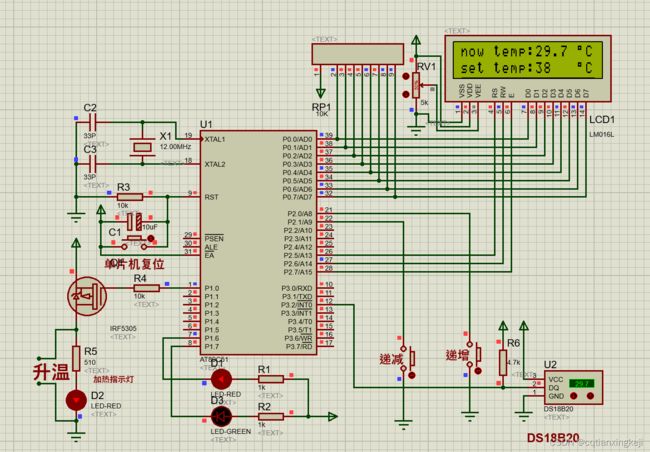
仿真工程
实物图
原理图
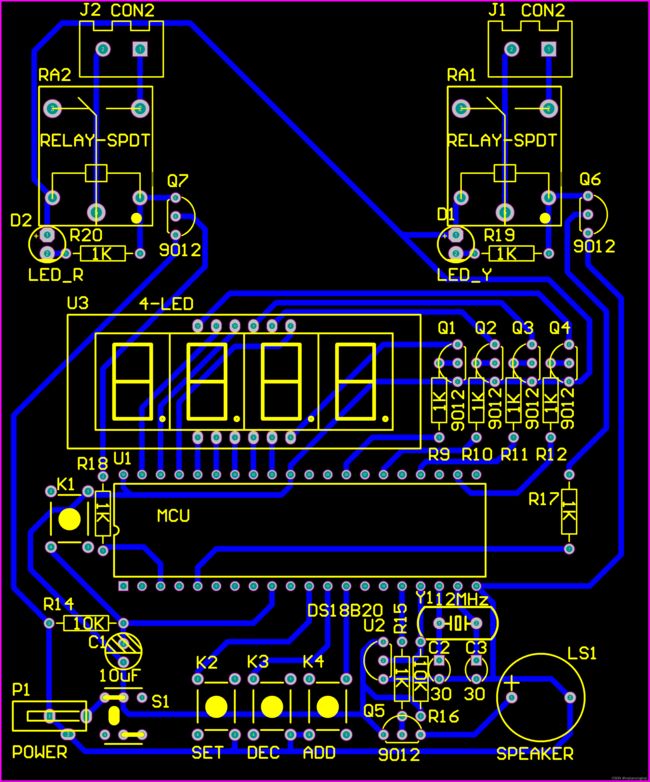
PCB图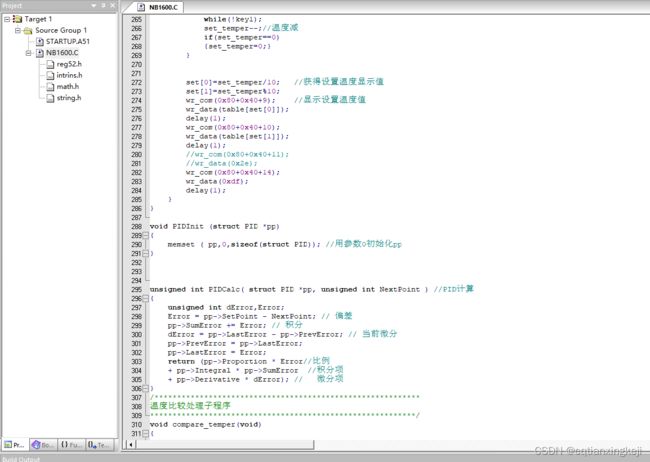


#include
#include
#include
#include
struct PID {
unsigned int SetPoint; // 设定目标 Desired Value
unsigned int Proportion; // 比例常数 Proportional Const
unsigned int Integral; // 积分常数 Integral Const
unsigned int Derivative; // 微分常数 Derivative Const
unsigned int LastError; // Error[-1]
unsigned int PrevError; // Error[-2]
unsigned int SumError; // Sums of Errors
};
struct PID spid; // PID Control Structure
unsigned int rout; // PID Response (Output) 响应输出
unsigned int rin; // PID Feedback (Input)//反馈输入
unsigned char high_time,low_time,count=0;//占空比调节参数
#define uchar unsigned char
#define uint unsigned int
sbit output=P1^0;
sbit ds=P3^2;
sbit DQ=P3^2;//ds18b20与单片机连接口
sbit lcden=P2^7;//LCE使能引脚
sbit lcdrs=P2^5;
sbit lcdrw=P2^6;
sbit ledred=P1^6;
sbit ledgreen=P1^7;
sbit key0=P2^0;//按键引脚
sbit key1=P2^1;
uchar set[2]={0};
uchar code str1[]="now temp: C";
uchar code str2[]="set temp: C";
uchar code table[]={0x30,0x31,0x32,0x33,0x34,0x35,0x36,0x37,0x38,0x39};
uchar n,num;
int set_temper=30,temper,temp; //温度变量定义
unsigned int s;
float f_temp;//转换后的温度
uint tvalue;
uchar tflag;//温度正负标志
void delay(i)//延时函数
{
uint j;
for(i;i>0;i--)
for(j=110;j>0;j--);
}
void wr_com(uchar ml)//写命令
{
lcdrs=0;
P0=ml;
delay(5);
lcden=1;
delay(5);
lcden=0;
}
void wr_data(uchar shuju)//写数据
{
lcdrs=1;
//lcden=1;
P0=shuju;
delay(5);
lcden=1;
delay(5);
lcden=0;
}
void init() //按照时序操作的初始化
{
lcdrw=0;
wr_com(0x38);//显示模式设置,设置为16*2显示,5*7点阵,八位数据口
wr_com(0x0c);//开显示,但不开光标,光标不闪
wr_com(0x06);//显示光标移动设置
wr_com(0x01);// 清屏
wr_com(0x80); // 数据指针初始化
for(num=0;num<16;num++)
{
wr_data(str1[num]);//now temp
}
wr_com(0x80+0x40); //地址初始化
for(num=0;num<16;num++)
{
wr_data(str2[num]);//set temp
}
}
/*************************DS1820程序****************************/
void delay_18B20(unsigned int i)//延时1微秒
{
while(i--);
}
void ds1820rst(void)/*ds1820复位*/
{
unsigned char x=0;
DQ = 1; //DQ复位
delay_18B20(4); //延时
DQ = 0; //DQ拉低
TR0=0;
delay_18B20(100); //精确延时大于
TR0=1;
DQ = 1; //拉高
delay_18B20(40);
}
uchar ds1820rd(void)/*读数据*/
{
unsigned char i=0;
unsigned char dat = 0;
TR0=0;
for (i=8;i>0;i--)
{
DQ = 0; //给脉冲信号
dat>>=1;
DQ = 1; //给脉冲信号
if(DQ)
dat|=0x80;
delay_18B20(10);
}
return(dat);
}
void ds1820wr(uchar wdata)/*写数据*/
{
unsigned char i=0;
TR0=0;
for (i=8; i>0; i--)
{
DQ = 0;
DQ = wdata&0x01;
delay_18B20(10);
DQ = 1;
wdata>>=1;
}
}
uint get_temper()//获取温度
{
uchar a,b;
ds1820rst();
ds1820wr(0xcc);//*跳过读序列号*/
ds1820wr(0x44);//*启动温度转换*/
ds1820rst();
ds1820wr(0xcc);//*跳过读序列号*/
ds1820wr(0xbe);//*读取温度*/
a=ds1820rd();
b=ds1820rd();
tvalue=b;
tvalue<<=8;
tvalue=tvalue|a;
TR0=1;
if(tvalue<0x0fff) tflag=0;
else {tvalue=~tvalue+1;tflag=1;}
tvalue=tvalue*(0.625);//温度值扩大10倍,精确到1位小数
temp=tvalue;
return temp;
}
void dis_temp(int t)//显示温度
{
uchar d0,d1,d2,d3;
//t=26;
if(tflag==0)
{
d0=t/1000+0x30;
d1=t%1000/100+0x30;
d2=t%100/10+0x30;
d3=t%10+0x30;
if(d0==0x30)
{
wr_com(0x80+9);
wr_data(d1);
wr_com(0x80+10);
wr_data(d2);
wr_com(0x80+11);
wr_data(0x2e);
wr_com(0x80+12);
wr_data(d3);
}
else
{
wr_com(0x80+9);
wr_data(d0);
wr_com(0x80+10);
wr_data(d1);
wr_com(0x80+11);
wr_data(d2);
wr_com(0x80+12);
wr_data(' ');
}
}
else
{
wr_com(0x80+9);
wr_data('-');
wr_com(0x80+10);
wr_data(d1);
wr_com(0x80+11);
wr_data(d2);
wr_com(0x80+12);
wr_data(' ');
//wr_com(0x80+12);
//wr_data(d3);
}
wr_com(0x80+14);
wr_data(0xdf);
temper=t/10;
}
void keyscan()//键盘扫描
{
if(key0==0)
{
delay(1);
if(key0==0)
{
while(!key0);
delay(1);
while(!key0);
set_temper++;
}
set[0]=set_temper/10; //获得设置温度显示值
set[1]=set_temper%10;
wr_com(0x80+0x40+9);
wr_data(table[set[0]]);
delay(1);
wr_com(0x80+0x40+10);
wr_data(table[set[1]]);
delay(1);
//wr_com(0x80+0x40+11);
//wr_data(0x2e);
//wr_com(0x80+0x40+14);
//wr_data(0xdf);
delay(1);
}
if(key1==0)
{
delay(3);//延时去抖
if(key1==0)
{
while(!key1);
delay(3);
while(!key1);
set_temper--;//温度减
if(set_temper==0)
{set_temper=0;}
}
set[0]=set_temper/10; //获得设置温度显示值
set[1]=set_temper%10;
wr_com(0x80+0x40+9); //显示设置温度值
wr_data(table[set[0]]);
delay(1);
wr_com(0x80+0x40+10);
wr_data(table[set[1]]);
delay(1);
//wr_com(0x80+0x40+11);
//wr_data(0x2e);
wr_com(0x80+0x40+14);
wr_data(0xdf);
delay(1);
}
}
void PIDInit (struct PID *pp)
{
memset ( pp,0,sizeof(struct PID)); //用参数0初始化pp
}
unsigned int PIDCalc( struct PID *pp, unsigned int NextPoint ) //PID计算
{
unsigned int dError,Error;
Error = pp->SetPoint - NextPoint; // 偏差
pp->SumError += Error; // 积分
dError = pp->LastError - pp->PrevError; // 当前微分
pp->PrevError = pp->LastError;
pp->LastError = Error;
return (pp->Proportion * Error//比例
+ pp->Integral * pp->SumError //积分项
+ pp->Derivative * dError); // 微分项
}
/***********************************************************
温度比较处理子程序
***********************************************************/
void compare_temper(void)
{
unsigned char i;
if(set_temper>temper) //设置温度大于当前温度
{
ledred=0;
ledgreen=1;
if(set_temper-temper>1) //温度相差1度以上
{
high_time=100;
low_time=0;
}
else //设置温度不大于当前温度
{
for(i=0;i<10;i++)
{
get_temper();
rin = s; // Read Input
rout = PIDCalc ( &spid,rin ); // Perform PID Interation
}
if (high_time<=100) high_time=(unsigned char)(rout/800);
else high_time=100;
low_time= (100-high_time);
}
}
else if(set_temper<=temper) //设置温度不大于当前温度
{
ledred=1;
ledgreen=0;
if(temper-set_temper>0) //温度相差0度以上
{
high_time=0;
low_time=100;
}
else
{
for(i=0;i<10;i++)
{
get_temper();
rin = s; // Read Input
rout = PIDCalc ( &spid,rin ); // Perform PID Interation
}
if (high_time<100) high_time=(unsigned char)(rout/10000);
else high_time=0;
low_time= (100-high_time);
}
}
}
/*****************************************************
T0中断服务子程序,用于控制电平的翻转 ,40us*100=4ms周期
******************************************************/
void serve_T0() interrupt 1 using 1
{
if(++count<=(high_time)) output=0;
else if(count<=100)
{
output=1;
}
else count=0;
TH0=0x2f;
TL0=0x40;
}
/***********主函数**********/
void main(void)
{
unsigned char i;
init();//LCD初始化
TMOD=0x01;
TH0=0x2f;
TL0=0x40;
EA=1;
ET0=1;
TR0=1;
high_time=50;
low_time=50;
PIDInit ( &spid ); // Initialize Structure
spid.Proportion= 10; // Set PID Coefficients
spid.Integral = 8;
spid.Derivative =6;
spid.SetPoint =100; // Set PID Setpoint
set[0]=set_temper/10;
set[1]=set_temper%10;
wr_com(0x80+0x40+9); //显示设置温度
wr_data(table[set[0]]);
delay(1);
wr_com(0x80+0x40+10);
wr_data(table[set[1]]);
delay(1);
wr_com(0x80+0x40+14); //显示温度符号
wr_data(0xdf);
delay(1);
while(1)
{
keyscan(); //按键扫描
for(i=0;i<10;i++) //循环10次
{
dis_temp(get_temper()); //显示温度值
if((key0==0)||(key1==0)) break; //如果有按键退出显示循环
}
if((key0!=0)&&(key1!=0)) compare_temper(); //比较温度
}
}