RTthread线程间通信(邮箱,消息队列,信号/软件中断)---02代码分析邮箱和消息队列
RT-Thread代码分析
这是源码分析, 实际使用看这个
信号看这个
看这一篇之前最好看一下我的RT-Thread对象管理以及线程管理, 时钟管理
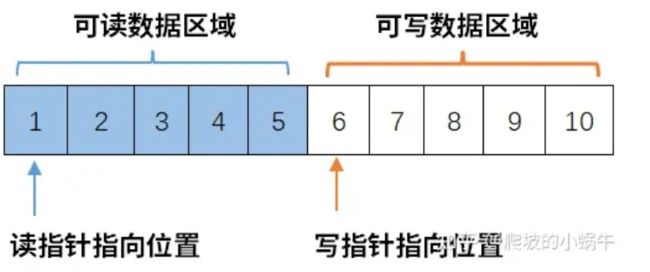
邮箱
实际是实现是一个对环形缓存区的使用
struct rt_mailbox
{
struct rt_ipc_object parent; /**< inherit from ipc_object */
rt_ubase_t *msg_pool; /**< start address of
message buffer 缓存区地址*/
rt_uint16_t size; /**< size of message pool 大小*/
rt_uint16_t entry; /**< index of messages in msg_pool
记录一下数量*/
rt_uint16_t in_offset; /**< input offset of the message buffer记录一下写的位置 */
rt_uint16_t out_offset; /**< output offset of the message 记录一下读的位置buffer */
rt_list_t suspend_sender_thread; /**< sender thread suspended on
挂起的任务链表this mailbox */
};
typedef struct rt_mailbox *rt_mailbox_t;
struct rt_ipc_object
{
struct rt_object parent; /**< inherit from rt_object */
rt_list_t suspend_thread; /**< threads pended on this resource 记录接收的任务的队列 */
};
创建
rt_mailbox_t rt_mb_create(const char *name, rt_size_t size, rt_uint8_t flag)
{
rt_mailbox_t mb;
RT_DEBUG_NOT_IN_INTERRUPT;
/* allocate object 这一个在对象创建的那一篇里面分析过了*/
mb = (rt_mailbox_t)rt_object_allocate(RT_Object_Class_MailBox, name);
if (mb == RT_NULL)
return mb;
/* set parent */
mb->parent.parent.flag = flag;
/* initialize ipc object 实际上就是初始化一个用于记录接收任务挂起的链表 */
rt_ipc_object_init(&(mb->parent));
/* initialize mailbox 记录一些信息 */
mb->size = size;
//获取一个缓存区
mb->msg_pool = (rt_ubase_t *)RT_KERNEL_MALLOC(mb->size * sizeof(rt_ubase_t));
if (mb->msg_pool == RT_NULL)
{
//获取失败
/* delete mailbox object */
rt_object_delete(&(mb->parent.parent));
return RT_NULL;
}
mb->entry = 0;
mb->in_offset = 0;
mb->out_offset = 0;
/* initialize an additional list of sender suspend thread 发送者的队列 */
rt_list_init(&(mb->suspend_sender_thread));
return mb;
}
//实际就是记录一下信息
rt_err_t rt_mb_init(rt_mailbox_t mb,
const char *name,
void *msgpool,
rt_size_t size,
rt_uint8_t flag)
{
RT_ASSERT(mb != RT_NULL);
/* initialize object 具体看对象的分析那一章*/
rt_object_init(&(mb->parent.parent), RT_Object_Class_MailBox, name);
/* set parent flag */
mb->parent.parent.flag = flag;
/* initialize ipc object */
rt_ipc_object_init(&(mb->parent));
/* initialize mailbox */
mb->msg_pool = (rt_ubase_t *)msgpool;
mb->size = size;
mb->entry = 0;
mb->in_offset = 0;
mb->out_offset = 0;
/* initialize an additional list of sender suspend thread */
rt_list_init(&(mb->suspend_sender_thread));
return RT_EOK;
}
删除
rt_err_t rt_mb_delete(rt_mailbox_t mb)
{
RT_DEBUG_NOT_IN_INTERRUPT;
/* resume all suspended thread 把所有的挂起的接收线程释放, 这个同步那一章里面有 */
rt_ipc_list_resume_all(&(mb->parent.suspend_thread));
/* also resume all mailbox private suspended thread 发送线程释放 */
rt_ipc_list_resume_all(&(mb->suspend_sender_thread));
/* free mailbox pool 释放缓存内存 */
RT_KERNEL_FREE(mb->msg_pool);
/* delete mailbox object 控制块会在空闲任务释放 */
rt_object_delete(&(mb->parent.parent));
return RT_EOK;
}
发送
rt_err_t rt_mb_send(rt_mailbox_t mb, rt_ubase_t value)
{
return rt_mb_send_wait(mb, value, 0);
}
rt_err_t rt_mb_send_wait(rt_mailbox_t mb,
rt_ubase_t value,
rt_int32_t timeout)
{
struct rt_thread *thread;
register rt_ubase_t temp;
rt_uint32_t tick_delta;
/* initialize delta tick */
tick_delta = 0;
/* get current thread 获取当前线程 */
thread = rt_thread_self();
//回调函数
RT_OBJECT_HOOK_CALL(rt_object_put_hook, (&(mb->parent.parent)));
/* disable interrupt 临界区 */
temp = rt_hw_interrupt_disable();
/* for non-blocking call 看一看有没有位置 */
if (mb->entry == mb->size && timeout == 0)
{
//没有并且不等待
rt_hw_interrupt_enable(temp);
return -RT_EFULL;
}
/* mailbox is full */
while (mb->entry == mb->size)
{
//邮箱满了
/* reset error number in thread */
thread->error = RT_EOK;
/* no waiting, return timeout */
if (timeout == 0)
{
/* enable interrupt 这一个线程等待时间到了 */
rt_hw_interrupt_enable(temp);
return -RT_EFULL;
}
//这个使用的时候需要已经开始调度了
RT_DEBUG_IN_THREAD_CONTEXT;
/* suspend current thread */
//把这一个任务记录在挂起队列里面(具体分析看任务同步的那一篇)
rt_ipc_list_suspend(&(mb->suspend_sender_thread),
thread,
mb->parent.parent.flag);
/* has waiting time, start thread timer */
if (timeout > 0)
{
//需要等待
/* get the start tick of timer 获取现在的时间 */
tick_delta = rt_tick_get();
RT_DEBUG_LOG(RT_DEBUG_IPC, ("mb_send_wait: start timer of thread:%s\n",
thread->name));
/* reset the timeout of thread timer and start it 开启一个时钟用于超时时候的唤醒*/
rt_timer_control(&(thread->thread_timer),
RT_TIMER_CTRL_SET_TIME,
&timeout);
rt_timer_start(&(thread->thread_timer));
}
/* enable interrupt */
rt_hw_interrupt_enable(temp);
/* re-schedule 启动一次调度 */
rt_schedule();
//这里线程被唤醒, 看一看这这时候是不是超时了
/* resume from suspend state */
if (thread->error != RT_EOK)
{
/* return error */
return thread->error;
}
/* disable interrupt 在这之前可能有一个高优先级把这一个位置又使用了, 需要再看看可不可以发送*/
temp = rt_hw_interrupt_disable();
/* if it's not waiting forever and then re-calculate timeout tick 跟新一下发送的时间, 再试着发送一次 */
if (timeout > 0)
{
tick_delta = rt_tick_get() - tick_delta;
timeout -= tick_delta;
//时间已经到了
if (timeout < 0)
timeout = 0;
}
}
//可以发送信息
/* set ptr 记录一下信息*/
mb->msg_pool[mb->in_offset] = value;
/* increase input offset 更新一下记录的指针 */
++ mb->in_offset;
if (mb->in_offset >= mb->size)
mb->in_offset = 0;//大小大于这一个环形缓冲区, 回头部
/* increase message entry */
mb->entry ++;//大小加一
/* resume suspended thread 看一看接收的有没有在等的 */
if (!rt_list_isempty(&mb->parent.suspend_thread))
{
//唤醒一下第一个等待的线程以及把时钟关了(看线程同步)
rt_ipc_list_resume(&(mb->parent.suspend_thread));
/* enable interrupt */
rt_hw_interrupt_enable(temp);
//切换一下任务
rt_schedule();
return RT_EOK;
}
/* enable interrupt */
rt_hw_interrupt_enable(temp);
return RT_EOK;
}
接收
//基本和发送一样, 只是循环判断是为空, 以及标识符加减反过来了
rt_err_t rt_mb_recv(rt_mailbox_t mb, rt_ubase_t *value, rt_int32_t timeout)
{
struct rt_thread *thread;
register rt_ubase_t temp;
rt_uint32_t tick_delta;
/* parameter check */
RT_ASSERT(mb != RT_NULL);
RT_ASSERT(rt_object_get_type(&mb->parent.parent) == RT_Object_Class_MailBox);
/* initialize delta tick */
tick_delta = 0;
/* get current thread */
thread = rt_thread_self();
RT_OBJECT_HOOK_CALL(rt_object_trytake_hook, (&(mb->parent.parent)));
/* disable interrupt */
temp = rt_hw_interrupt_disable();
/* for non-blocking call */
if (mb->entry == 0 && timeout == 0)
{
rt_hw_interrupt_enable(temp);
return -RT_ETIMEOUT;
}
/* mailbox is empty 看看是不是空的 */
while (mb->entry == 0)
{
//需要等待
/* reset error number in thread */
thread->error = RT_EOK;
/* no waiting, return timeout */
if (timeout == 0)
{
//等待的时间到了, 失败
/* enable interrupt */
rt_hw_interrupt_enable(temp);
thread->error = -RT_ETIMEOUT;
return -RT_ETIMEOUT;
}
//必须打开调度器了
RT_DEBUG_IN_THREAD_CONTEXT;
//一个典型的icp挂起处理
/* suspend current thread */
rt_ipc_list_suspend(&(mb->parent.suspend_thread),
thread,
mb->parent.parent.flag);
/* has waiting time, start thread timer 还有时间, 挂起*/
if (timeout > 0)
{
/* get the start tick of timer */
tick_delta = rt_tick_get();
RT_DEBUG_LOG(RT_DEBUG_IPC, ("mb_recv: start timer of thread:%s\n",
thread->name));
/* reset the timeout of thread timer and start it */
rt_timer_control(&(thread->thread_timer),
RT_TIMER_CTRL_SET_TIME,
&timeout);
rt_timer_start(&(thread->thread_timer));
}
/* enable interrupt */
rt_hw_interrupt_enable(temp);
/* re-schedule */
rt_schedule();
//切换, 看一看是不是出错了(超时等)
/* resume from suspend state */
if (thread->error != RT_EOK)
{
/* return error */
return thread->error;
}
/* disable interrupt 最后检测一下有没有位置 */
temp = rt_hw_interrupt_disable();
/* if it's not waiting forever and then re-calculate timeout tick 更新时间 */
if (timeout > 0)
{
tick_delta = rt_tick_get() - tick_delta;
timeout -= tick_delta;
if (timeout < 0)
timeout = 0;
}
}
/* fill ptr */
*value = mb->msg_pool[mb->out_offset];
/* increase output offset */
++ mb->out_offset;
if (mb->out_offset >= mb->size)
mb->out_offset = 0;
/* decrease message entry */
mb->entry --;
/* resume suspended thread */
if (!rt_list_isempty(&(mb->suspend_sender_thread)))
{
//释放第一个线程
rt_ipc_list_resume(&(mb->suspend_sender_thread));
/* enable interrupt */
rt_hw_interrupt_enable(temp);
RT_OBJECT_HOOK_CALL(rt_object_take_hook, (&(mb->parent.parent)));
rt_schedule();
return RT_EOK;
}
/* enable interrupt */
rt_hw_interrupt_enable(temp);
RT_OBJECT_HOOK_CALL(rt_object_take_hook, (&(mb->parent.parent)));
return RT_EOK;
}
消息队列
实际上这是一个对链表的使用
消息链表: 使用两个指针记录消息链表的头以及尾
空闲链表: 类似栈, 使用一个指针记录空闲任务尾部
struct rt_messagequeue
{
struct rt_ipc_object parent; /**< inherit from ipc_object */
void *msg_pool; /**< start address of message
queue 存放消息的缓冲区 */
rt_uint16_t msg_size; /**< message size of each message
记录可以容纳的每一个消息的大小*/
rt_uint16_t max_msgs; /**< max number of messages
记录消息的个数*/
rt_uint16_t entry; /**< index of messages in the queue 记录现在消息的个数 */
void *msg_queue_head; /**< list head 链表头 */
void *msg_queue_tail; /**< list tail 链表尾*/
void *msg_queue_free; /**< pointer indicated the free node of queue 记录缓冲区里下一个空闲消息的链表 */
rt_list_t suspend_sender_thread; /**< sender thread suspended on this message queue 发送线程的挂起的等待队列*/
};
struct rt_mq_message
{
struct rt_mq_message *next;
};
一个管理信息的链表
创建

初始化以后的缓冲区
rt_mq_t rt_mq_create(const char *name,
rt_size_t msg_size,
rt_size_t max_msgs,
rt_uint8_t flag)
{
struct rt_messagequeue *mq;
struct rt_mq_message *head;
register rt_base_t temp;
//这一个函数不应该在中断里面使用
RT_DEBUG_NOT_IN_INTERRUPT;
/* allocate object 获取一个邮箱的对象 */
mq = (rt_mq_t)rt_object_allocate(RT_Object_Class_MessageQueue, name);
if (mq == RT_NULL)
return mq;
/* set parent 记录一下标志 */
mq->parent.parent.flag = flag;
/* initialize ipc object 主要是初始化一个ipc的链表(这一部分在信号同步的的那一篇里面有) */
rt_ipc_object_init(&(mq->parent));
/* initialize message queue */
/* get correct message size 把这一个按照四字节对齐 */
mq->msg_size = RT_ALIGN(msg_size, RT_ALIGN_SIZE);
mq->max_msgs = max_msgs;
/* allocate message pool 获取一个存信息的内存, 实际的大小是(信息大小 + 管理结构体(一个链表)) * 数量 */
mq->msg_pool = RT_KERNEL_MALLOC((mq->msg_size + sizeof(struct rt_mq_message)) * mq->max_msgs);
if (mq->msg_pool == RT_NULL)
{
//获取失败的时候
rt_object_delete(&(mq->parent.parent));
return RT_NULL;
}
/* initialize message list */
mq->msg_queue_head = RT_NULL;
mq->msg_queue_tail = RT_NULL;
/* initialize message empty list 初始化这一个缓存里面的信息 */
mq->msg_queue_free = RT_NULL;
for (temp = 0; temp < mq->max_msgs; temp ++)
{
head = (struct rt_mq_message *)((rt_uint8_t *)mq->msg_pool +
temp * (mq->msg_size + sizeof(struct rt_mq_message)));//计算一下第n个信息的位置
head->next = (struct rt_mq_message *)mq->msg_queue_free;//初始化链表指向数组前一个信息
mq->msg_queue_free = head;//更新一下可以使用的下一个的位置
}
/* the initial entry is zero */
mq->entry = 0;
/* initialize an additional list of sender suspend thread */
rt_list_init(&(mq->suspend_sender_thread));
return mq;
}
//静态, 实际就是记录一下用到的值
rt_err_t rt_mq_init(rt_mq_t mq,
const char *name,
void *msgpool,
rt_size_t msg_size,
rt_size_t pool_size,
rt_uint8_t flag)
{
struct rt_mq_message *head;
register rt_base_t temp;
/* parameter check */
RT_ASSERT(mq != RT_NULL);
/* initialize object */
rt_object_init(&(mq->parent.parent), RT_Object_Class_MessageQueue, name);
/* set parent flag */
mq->parent.parent.flag = flag;
/* initialize ipc object */
rt_ipc_object_init(&(mq->parent));
/* set message pool */
mq->msg_pool = msgpool;
/* get correct message size 计算一下实际可以存储的信息的个数 */
mq->msg_size = RT_ALIGN(msg_size, RT_ALIGN_SIZE);
mq->max_msgs = pool_size / (mq->msg_size + sizeof(struct rt_mq_message));
/* initialize message list */
mq->msg_queue_head = RT_NULL;
mq->msg_queue_tail = RT_NULL;
/* initialize message empty list */
mq->msg_queue_free = RT_NULL;
for (temp = 0; temp < mq->max_msgs; temp ++)
{
head = (struct rt_mq_message *)((rt_uint8_t *)mq->msg_pool +
temp * (mq->msg_size + sizeof(struct rt_mq_message)));
head->next = (struct rt_mq_message *)mq->msg_queue_free;
mq->msg_queue_free = head;
}
/* the initial entry is zero */
mq->entry = 0;
/* initialize an additional list of sender suspend thread */
rt_list_init(&(mq->suspend_sender_thread));
return RT_EOK;
}
发送消息
rt_err_t rt_mq_send_wait(rt_mq_t mq,
const void *buffer,
rt_size_t size,
rt_int32_t timeout)
{
register rt_ubase_t temp;
struct rt_mq_message *msg;
rt_uint32_t tick_delta;
struct rt_thread *thread;
/* greater than one message size */
if (size > mq->msg_size)
//发送的消息太大了, 不能发送
return -RT_ERROR;
/* initialize delta tick */
tick_delta = 0;
/* get current thread 获取当前线程 */
thread = rt_thread_self();
RT_OBJECT_HOOK_CALL(rt_object_put_hook, (&(mq->parent.parent)));
/* disable interrupt 临界区 */
temp = rt_hw_interrupt_disable();
/* get a free list, there must be an empty item */
msg = (struct rt_mq_message *)mq->msg_queue_free;
/* for non-blocking call */
if (msg == RT_NULL && timeout == 0)
{
/* enable interrupt 没有位置, 并且不等待 */
rt_hw_interrupt_enable(temp);
return -RT_EFULL;
}
/* message queue is full 没有可以用于发送的空闲缓冲区 */
while ((msg = mq->msg_queue_free) == RT_NULL)
{
/* reset error number in thread */
thread->error = RT_EOK;
/* no waiting, return timeout */
if (timeout == 0)
{
/* enable interrupt 时间到了 */
rt_hw_interrupt_enable(temp);
return -RT_EFULL;
}
//一个典型的ipc挂起
RT_DEBUG_IN_THREAD_CONTEXT;
/* suspend current thread */
rt_ipc_list_suspend(&(mq->suspend_sender_thread),
thread,
mq->parent.parent.flag);
/* has waiting time, start thread timer */
if (timeout > 0)
{
//还需要等待
/* get the start tick of timer 记录现在的时间, 用于计算是不是超时 */
tick_delta = rt_tick_get();
RT_DEBUG_LOG(RT_DEBUG_IPC, ("mq_send_wait: start timer of thread:%s\n",
thread->name));
/* reset the timeout of thread timer and start it */
rt_timer_control(&(thread->thread_timer),
RT_TIMER_CTRL_SET_TIME,
&timeout);
rt_timer_start(&(thread->thread_timer));
}
/* enable interrupt */
rt_hw_interrupt_enable(temp);
/* re-schedule 任务切换*/
rt_schedule();
//回来了, 可能有位置或者出错(超时)
/* resume from suspend state */
if (thread->error != RT_EOK)
{
//是出错回来的
/* return error */
return thread->error;
}
/* disable interrupt */
temp = rt_hw_interrupt_disable();
//最后更新时间以及检测一下是不是真的有位置
/* if it's not waiting forever and then re-calculate timeout tick */
if (timeout > 0)
{
tick_delta = rt_tick_get() - tick_delta;
timeout -= tick_delta;
if (timeout < 0)
timeout = 0;
}
}
//有位置
/* move free list pointer 获取一个位置, 这个msg是记录空闲位置的那一个指针 */
mq->msg_queue_free = msg->next;
/* enable interrupt */
rt_hw_interrupt_enable(temp);
/* the msg is the new tailer of list, the next shall be NULL 这是一个新加入的信息, 没有下一个*/
msg->next = RT_NULL;
/* copy buffer 把信息拷贝到缓冲区 */
rt_memcpy(msg + 1, buffer, size);
/* disable interrupt */
temp = rt_hw_interrupt_disable();
/* link msg to message queue 看一看链表里面有没有信息*/
if (mq->msg_queue_tail != RT_NULL)
{
//这是不第一个信息, 更新上一条信息的下一条为这个新的消息
/* if the tail exists, */
((struct rt_mq_message *)mq->msg_queue_tail)->next = msg;
}
/* set new tail 尾部记录为这一个信息 */
mq->msg_queue_tail = msg;
/* if the head is empty, set head 这时候没有信息的话记录一下这一条信息为第一条 */
if (mq->msg_queue_head == RT_NULL)
mq->msg_queue_head = msg;
/* increase message entry 数量加一 */
mq->entry ++;
/* resume suspended thread 看一看有没有可以释放的任务*/
if (!rt_list_isempty(&mq->parent.suspend_thread))
{
//释放第一个任务
rt_ipc_list_resume(&(mq->parent.suspend_thread));
/* enable interrupt */
rt_hw_interrupt_enable(temp);
rt_schedule();
return RT_EOK;
}
/* enable interrupt */
rt_hw_interrupt_enable(temp);
return RT_EOK;
}
接收信息
//基本一样, 主要看链表操作
rt_err_t rt_mq_recv(rt_mq_t mq,
void *buffer,
rt_size_t size,
rt_int32_t timeout)
{
struct rt_thread *thread;
register rt_ubase_t temp;
struct rt_mq_message *msg;
rt_uint32_t tick_delta;
/* parameter check */
RT_ASSERT(mq != RT_NULL);
RT_ASSERT(rt_object_get_type(&mq->parent.parent) == RT_Object_Class_MessageQueue);
RT_ASSERT(buffer != RT_NULL);
RT_ASSERT(size != 0);
/* initialize delta tick */
tick_delta = 0;
/* get current thread */
thread = rt_thread_self();
RT_OBJECT_HOOK_CALL(rt_object_trytake_hook, (&(mq->parent.parent)));
/* disable interrupt */
temp = rt_hw_interrupt_disable();
/* for non-blocking call */
if (mq->entry == 0 && timeout == 0)
{
//没有可以获取的信息, 并且不等待
rt_hw_interrupt_enable(temp);
return -RT_ETIMEOUT;
}
/* message queue is empty 没有信息 */
while (mq->entry == 0)
{
RT_DEBUG_IN_THREAD_CONTEXT;
/* reset error number in thread */
thread->error = RT_EOK;
/* no waiting, return timeout 超时 */
if (timeout == 0)
{
/* enable interrupt */
rt_hw_interrupt_enable(temp);
thread->error = -RT_ETIMEOUT;
return -RT_ETIMEOUT;
}
//ipc挂起
/* suspend current thread */
rt_ipc_list_suspend(&(mq->parent.suspend_thread),
thread,
mq->parent.parent.flag);
/* has waiting time, start thread timer */
if (timeout > 0)
{
/* get the start tick of timer */
tick_delta = rt_tick_get();
RT_DEBUG_LOG(RT_DEBUG_IPC, ("set thread:%s to timer list\n",
thread->name));
/* reset the timeout of thread timer and start it */
rt_timer_control(&(thread->thread_timer),
RT_TIMER_CTRL_SET_TIME,
&timeout);
rt_timer_start(&(thread->thread_timer));
}
/* enable interrupt */
rt_hw_interrupt_enable(temp);
/* re-schedule */
rt_schedule();
/* recv message */
if (thread->error != RT_EOK)
{
/* return error */
return thread->error;
}
/* disable interrupt */
temp = rt_hw_interrupt_disable();
/* if it's not waiting forever and then re-calculate timeout tick */
if (timeout > 0)
{
tick_delta = rt_tick_get() - tick_delta;
timeout -= tick_delta;
if (timeout < 0)
timeout = 0;
}
}
/* get message from queue 获取当前的第一个信息 */
msg = (struct rt_mq_message *)mq->msg_queue_head;
/* move message queue head 更新一下下一条消息的位置 */
mq->msg_queue_head = msg->next;
/* reach queue tail, set to NULL 这个里面没有消息了(头尾一样, 只有一条信息) */
if (mq->msg_queue_tail == msg)
mq->msg_queue_tail = RT_NULL;
/* decrease message entry 数量更新 */
mq->entry --;
/* enable interrupt */
rt_hw_interrupt_enable(temp);
/* copy message 拷贝一下信息 */
rt_memcpy(buffer, msg + 1, size > mq->msg_size ? mq->msg_size : size);
/* disable interrupt */
temp = rt_hw_interrupt_disable();
/* put message to free list 把这个回归空闲队列 */
msg->next = (struct rt_mq_message *)mq->msg_queue_free;
mq->msg_queue_free = msg;
/* resume suspended thread 释放等待线程*/
if (!rt_list_isempty(&(mq->suspend_sender_thread)))
{
rt_ipc_list_resume(&(mq->suspend_sender_thread));
/* enable interrupt */
rt_hw_interrupt_enable(temp);
RT_OBJECT_HOOK_CALL(rt_object_take_hook, (&(mq->parent.parent)));
rt_schedule();
return RT_EOK;
}
/* enable interrupt */
rt_hw_interrupt_enable(temp);
RT_OBJECT_HOOK_CALL(rt_object_take_hook, (&(mq->parent.parent)));
return RT_EOK;
}