linux应用 进程间通信之信号量(System V)
1、定义
System V 信号量是一种用于进程间同步和互斥的机制,它是 System V IPC(Inter-Process Communication,进程间通信)机制的一部分。信号量通常用于控制对共享资源的访问,以避免竞争条件(race condition)和数据不一致性。
一般来说,System V 信号量常用于以下场景:
- 进程同步:多个进程需要协调执行顺序,例如在生产者-消费者问题中,生产者和消费者需要同步对共享缓冲区的访问。
- 资源互斥:多个进程需要互斥地访问共享资源,例如文件、打印机、设备等。
- 进程间通信:信号量也可以用于进程间的通信,通过信号量的值来进行信息传递。:
优点:
- 高效性:信号量是一种轻量级的同步机制,适用于对共享资源的快速访问和控制。
- 多种同步操作:信号量支持多种同步操作,包括 P(等待)操作和 V(释放)操作,可以灵活地控制对资源的访问。
- 可扩展性:信号量可以用于控制多个资源的访问,适用于复杂的同步和互斥场景。
缺点:
- 复杂性:与其他进程间通信机制相比,信号量的使用可能更为复杂,容易出现死锁等问题。
重要概念:
- P 操作:P 操作用于请求进入临界区(临界区是一段代码,一次只允许一个进程进入执行)。如果信号量的值大于 0,那么执行 P 操作会将信号量的值减 1,并允许进程进入临界区执行。如果信号量的值已经为 0,那么执行 P 操作的进程会被阻塞,直到信号量的值变为非零为止。
- V 操作:V 操作用于离开临界区。执行 V 操作会将信号量的值加 1。如果有其他进程因为执行 P 操作而被阻塞,那么执行 V 操作会唤醒其中一个被阻塞的进程。
2、常用接口介绍
2.1 编程常用接口和数据结构
2.1.1 ftok函数
ftok函数用于生成一个System V IPC对象(如消息队列、共享内存等)的key。它将pathname和proj_id组合起来,生成一个唯一的key,用于标识一个System V IPC对象。
key_t ftok(const char *pathname, int proj_id);- 入参:pathname是一个路径名,proj_id是一个用户指定的整数。
- 返回值:返回一个基于pathname和proj_id生成的key。
2.1.2 semget函数
semget 用于创建一个新的信号量集或者获取一个已存在的信号量集。
int semget(key_t key, int nsems, int semflg);- 入参:key用于标识信号量集的键值,通常使用 ftok 函数生成,nsems信号量集中包含的信号量数量,semflg:用于指定信号量的权限和标志,通常使用 IPC_CREAT 来创建一个新的信号量集。
- 返回值:返回一个信号量集的标识符(semid)。
2.1.3 semctl函数
semctl 用于对信号量集进行控制操作,比如初始化、获取值、设置值、删除等。
int semctl(int semid, int semnum, int cmd, ...);- 入参:semid信号量集的标识符,semnum信号量的索引,通常为 0,cmd:控制命令,用于指定要进行的操作,比如 SETVAL 用于设置信号量的值,... 根据不同的命令,可能会有额外的参数。
- 返回值:根据不同的命令,返回不同的值。
cmd取值如下:
GETVAL:获取信号量的值SETVAL:设置信号量的值GETPID:获取上次执行semop操作的进程IDGETNCNT:获取当前等待信号量值增加的进程数GETZCNT:获取当前等待信号量值减少的进程数GETALL:获取所有信号量的值SETALL:设置所有信号量的值IPC_RMID:删除信号量
当第三个参数为 SETVAL 时,需要第四个参数,第四个参数是一个 union semun 结构体类型的变量,用于指定要设置的信号量的值。
当第三个参数为 SETALL 时,需要第四个参数,第四个参数是一个指向 short 类型数组的指针,数组的长度等于信号量集中的信号量数量,用于指定要设置的所有信号量的值。
2.1.4 semop函数
semop 用于执行对信号量的操作,比如等待(P操作)和释放(V操作)。
int semop(int semid, struct sembuf *sops, unsigned nsops);- 入参:semid信号量集的标识符,sops指向一个 sembuf 结构体数组的指针,每个 sembuf 结构体描述了一个操作,nsops:sops 数组中结构体的数量。
- 返回值:成功返回 0,失败返回 -1。
2.1.5 struct sembuf
struct sembuf {
unsigned short sem_num; // 信号量在信号量集中的索引
short sem_op; // 操作值,可以是正数(V操作)或负数(P操作)
short sem_flg; // 操作标志位,可以使用 IPC_NOWAIT 等标志
};
sem_op |
sem_flg |
结果影响 |
|---|---|---|
| 正数 | 无 | 执行 V(释放)操作,增加信号量的值。如果信号量的值非负,就会唤醒等待该信号量的进程。操作成功返回,否则返回失败。 |
| 负数 | 无 | 执行 P(等待)操作,减少信号量的值。如果信号量的值小于 0,就会阻塞等待直到信号量的值变为非负。操作成功返回,否则返回失败。 |
| 0 | 无 | 执行 Z(等待直到值为 0)操作,等待信号量的值变为 0。如果信号量的值不为 0,就会阻塞等待。操作成功返回,否则返回失败。 |
| 任意 | IPC_NOWAIT |
如果操作无法立即进行,就会立即返回,而不是阻塞等待。如果操作成功返回,否则返回失败。 |
| 任意 | SEM_UNDO |
系统会跟踪对信号量的修改,并在进程终止时撤销这些修改,以防止进程异常终止导致信号量的值不一致。如果操作成功返回,否则返回失败。 |
2.1.6 union semun
union semun {
int val; // 用于设置单个信号量的值
struct semid_ds *buf; // 用于获取或设置信号量集的属性
unsigned short *array; // 用于设置所有信号量的值
} arg;
struct semid_ds {
struct ipc_perm sem_perm; // 信号量集的权限信息
time_t sem_otime; // 上次操作时间
time_t sem_ctime; // 上次修改时间
unsigned short sem_nsems; // 信号量集中的信号量数量
};
struct ipc_perm {
key_t key; // IPC 对象的键值
uid_t uid; // 所有者的用户ID
gid_t gid; // 所有者的组ID
uid_t cuid; // 创建者的用户ID
gid_t cgid; // 创建者的组ID
mode_t mode; // 权限
};
2.2 控制台常用命令
2.2.1 ipcs
ipcs命令用于显示系统中的IPC资源信息,包括消息队列、共享内存和信号量。-s选项表示只显示信号量的信息:
ipcs -s2.2.2 ipcrm
ipcrm命令用于删除指定的 IPC 对象,包括信号量:
ipcrm -s
3、编程示例
测试代码如下:
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#define SEM_FILE_PATH "/home/sem"
#define INIT_NUM 2
// 打印时分秒的宏
#define PRINT_MIN_SEC() do { \
time_t t = time(NULL); \
struct tm *tm_ptr = localtime(&t); \
printf("%02d:%02d:%02d:", tm_ptr->tm_hour, tm_ptr->tm_min, tm_ptr->tm_sec); \
} while (0)
int main(int argc, char *argv[])
{
key_t key;
int semid;
struct sembuf sops = {0};
// 文件不存在则创建文件
if (-1 == access(SEM_FILE_PATH, F_OK))
{
system("touch "SEM_FILE_PATH);
}
// 获取key
if((key = ftok(SEM_FILE_PATH, 'a')) < 0)
{
return 0;
}
// 创建一个信号量集
semid = semget(key, 1, IPC_CREAT | 0666);
// 命令行参数
// 第一个参数 P表示P操作 V表示V操作 I表示设置初始值为INIT_NUM D表示删除
if (argc != 2)
{
printf("Usage: %s P|V|I|D", argv[0]);
return 0;
}
if (!strcmp(argv[1], "P"))
{
PRINT_MIN_SEC();
printf("*****P Opt*****\n");
sops.sem_num = 0;
sops.sem_op = -1; // P 操作
sops.sem_flg = 0;
semop(semid, &sops, 1); // 执行 P 操作
PRINT_MIN_SEC();
printf("!!!Inter P Zero!!!\n");
}
else if (!strcmp(argv[1], "V"))
{
PRINT_MIN_SEC();
printf("*****V Opt*****\n");
sops.sem_num = 0;
sops.sem_op = 1; // V 操作
sops.sem_flg = 0;
semop(semid, &sops, 1); // 执行 V 操作
}
else if (!strcmp(argv[1], "I"))
{
PRINT_MIN_SEC();
printf("*****Init Opt*****\n");
// 设置信号量的值
union semun {
int val;
struct semid_ds *buf;
unsigned short *array;
} arg;
arg.val = INIT_NUM;
semctl(semid, 0, SETVAL, arg);
}
else if (!strcmp(argv[1], "D"))
{
PRINT_MIN_SEC();
printf("*****Delete Opt*****\n");
semctl(semid, 0, IPC_RMID);
}
else
{
printf("Usage: %s P|V|I|D", argv[0]);
return 0;
}
// 执行完操作后打印状态
struct semid_ds seminfo;
semctl(semid, 0, IPC_STAT, &seminfo);
PRINT_MIN_SEC();
printf("SME Value: %d\n", semctl(semid, 0, GETVAL));
PRINT_MIN_SEC();
printf("SME Mode: %o\n", seminfo.sem_perm.mode);
PRINT_MIN_SEC();
printf("SME Create User ID: %d\n", seminfo.sem_perm.uid);
return 0;
}
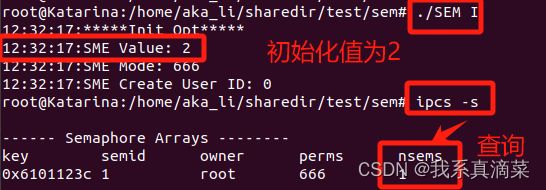
运行程序时根据命令行参数的不同执行不同操作:P表示P操作 V表示V操作 I表示设置初始值为INIT_NUM D表示删除,首先执行初始化,并查询:
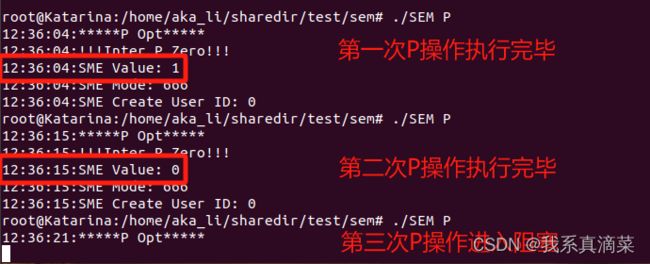
代码中P操作执行sops.sem_op = -1,初始值为2可以满足两次P操作,第三次P操作进入阻塞:
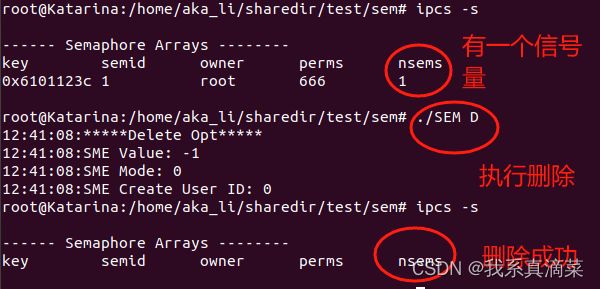
另起一个终端执行V操作,此时第三次P操作可以获取到信号量完成后续:

测试删除:
4、总结
本文阐述了进程间通信之信号量(System V)的定义,列举了编程中使用的接口和linux命令,编写了测试用例测试相关功能。