- 【16届蓝桥杯寒假刷题营】第2期DAY5
qystca
算法数据结构c++蓝桥杯
2.最大公因数-蓝桥云课问题描述给你2个正整数N,M。你需要构造一个有N个数的正整数序列a,满足以下条件:∑i=1Nai=M。求gcd(a),可能的最大值。输入描述输入一行两个正整数N,M,表示数组的长度和数组元素总和。输出描述输出一行,表示答案。输入格式19189114514输出格式2评测数据范围1≤N≤M≤109思路:如果m/n可以整除,那么这个m/n就是最大公因数,因为平均分配了。如果不可以
- 第八届蓝桥杯嵌入式省赛程序设计题解析(基于HAL库)
SZPU领跑
蓝桥杯蓝桥杯职场和发展
一.题目分析(1).题目(2).题目分析1.按键功能分析----过程控制a.选择按键按下的个数和目标层数(每个按键都要在一秒之内按下,否则就结束)b.当升降机到达目标平台,LED灯熄灭c.按下当前平台对于按键无效d.一次可以设定多个目标平台,上下平台都有按键的时候,运行顺序是先下后上2.PWM输出a.两路PWM输出控制上下行和开关门电机b.频率转换成自动重装载值c.比较值逻辑导图二.CubeMX配
- stm32芯片包_“蓝桥杯”嵌入式stm32入门(3)搞定竞赛资源包,这都不是事儿
weixin_39997695
stm32芯片包蓝桥杯入门训练fibonacci数列
在文章“蓝桥杯”嵌入式stm32开发入门(1)概述和“蓝桥杯”嵌入式stm32开发入门(2)ARM?Cortex?确定明白?中对“蓝桥杯”以及“蓝桥杯”比赛中嵌入式设计与开发(大学组、研究生组)中所用开发板CT117E和扩展板板上资源以及什么是ARM和Cortex概念做了简要介绍。这篇文章将介绍“蓝桥杯”嵌入式stm32竞赛官方所提供的资源包,这些资源包有一些重要的内容对参赛者来说非常重要。因此这
- 备赛蓝桥杯之第十五届职业院校组省赛第三题:产品360度展示
云端·目前学前端
备赛蓝桥杯蓝桥杯职场和发展
提示:本篇文章仅仅是作者自己目前在备赛蓝桥杯中,自己学习与刷题的学习笔记,写的不好,欢迎大家批评与建议由于个别题目代码量与题目量偏大,请大家自己去蓝桥杯官网【连接高校和企业-蓝桥云课】去寻找原题,在这里只提供部分原题代码本题目为:2024年十五届省赛职业院校组真题第三题:产品360度展示题目:需要考生作答的代码段如下:/***@param{*}initialValue初始值*@param{Arra
- LVGL+FreeRTOS实战项目:智能健康助手(软件篇)
爱学电子的刻刻帝
stm32LVGLfreertos
简介在智能健康助手项目中,软件部分是整个系统的核心,包括外设控制、操作系统管理、图形界面交互等功能。本文将对软件部分进行整体介绍,并划分为三个主要模块:STM32外设部分、FreeRTOS部分和LVGL部分,为后续的详细讲解铺垫。项目概述本项目采用STM32F411CEU6作为主控,结合LVGL图形界面库和FreeRTOS实时操作系统,实现智能健康监测与交互功能。系统集成多个传感器(MPU6050
- 蓝桥杯:大小写转换(异或转换)
KuunNNn
蓝桥杯java
一、题目要求输入一个字符串,将其中的大写字母转换为小写字母,小写字母转换为大写字母,其他字符不变,输出转换后的字符。示例:输入:Aa/.+-a输出:aA/.+-A二、代码展示publicstaticvoidmain(String[]args){Scannersc=newScanner(System.in);Stringstr=sc.next();for(inti=0;i='a'&&x='A'&&x
- Microchip 系列:SAM L 系列 (基于 ARM Cortex-M0+)_(9).UART通信接口开发
kkchenkx
单片机开发arm开发嵌入式硬件单片机架构硬件架构
UART通信接口开发1.UART通信接口简介UART(UniversalAsynchronousReceiver/Transmitter)是一种通用的串行通信接口,用于实现两个设备之间的异步数据传输。异步通信的特点是数据在发送和接收之间没有固定的时钟同步,而是通过起始位和停止位来标识数据帧的开始和结束。UART广泛应用于嵌入式系统中,如单片机与PC、单片机与传感器、单片机与无线模块之间的通信。在M
- Microchip 系列:SAM L 系列 (基于 ARM Cortex-M0+)_(15).闪存编程技术
kkchenkx
单片机开发arm开发mongodb数据库嵌入式硬件单片机物联网
闪存编程技术闪存编程概述闪存编程是指将数据或代码写入单片机的闪存存储器中的过程。在Microchip系列的SAML系列(基于ARMCortex-M0+)单片机中,闪存编程是一个重要的功能,用于存储应用程序代码、配置数据和用户数据。闪存编程通常涉及以下几个步骤:擦除闪存:在写入新的数据之前,需要先擦除目标闪存区域。编程闪存:将新的数据写入闪存。验证编程:确保写入的数据正确无误。闪存编程可以通过多种方
- 基于STM32的小灵蛇智能冰箱设计
小灵蛇
STM32stm32嵌入式硬件单片机
目录一.设计背景二.设计目标三.硬件设计四.实验方案4.1方案概述4.2硬件设计思路4.2.1整体器件框架4.2.1.1微控制器4.2.1.2温度传感器4.2.1.3距离传感器4.2.1.4颜色传感器4.2.1.5显示屏4.2.1.6LED4.3模块连接框架4.4原理图设计方案本博客介绍了基于STM32的小灵蛇智能冰箱设计,涉及到的创作平台有ALTINUM、Keil5等等。如果想要实验报告、PPT
- STM32 ADC
Asa319
stm32#定时器外设stm32嵌入式硬件单片机
stm32单片机-ADC-技术详细解+程序示范(FREERTOS+HAL+多通道+DMA)-知乎(zhihu.com)记录自己的嵌入式学习之路-CSDN博客【STM32】ADC_stm32adc-CSDN博客STM32——ADC篇(ADC的使用)_stm32adc-CSDN博客【STM32ADC】-CSDN博客
- 打卡信奥刷题(689)用C++信奥P8697[普及组/提高] [蓝桥杯 2019 国 C] 最长子序列
Loge编程生活
C++c++开发语言算法青少年编程数据结构
[蓝桥杯2019国C]最长子序列题目描述我们称一个字符串SSS包含字符串TTT是指TTT是SSS的一个子序列,即可以从字符串SSS中抽出若干个字符,它们按原来的顺序组合成一个新的字符串与TTT完全一样。给定两个字符串SSS和TTT,请问TTT中从第一个字符开始最长连续多少个字符被SSS包含?输入格式输入两行,每行一个字符串。第一行的字符串为SSS,第二行的字符串为TTT。两个字符串均非空而且只包含
- 单片机与人工智能:融合创新的未来之路
嵌入式大圣
单片机人工智能嵌入式硬件
摘要:本文深入探讨了单片机与人工智能的融合,阐述了单片机在人工智能应用中的角色、挑战与机遇。通过对相关技术的分析、实际案例的展示以及未来发展趋势的展望,揭示了这一融合在推动科技创新和产业发展中的巨大潜力。目录一、引言二、单片机与人工智能的基础概念三、单片机与人工智能的融合技术四、单片机与人工智能融合的应用场景五、单片机与人工智能融合面临的挑战六、单片机与人工智能融合的发展趋势七、结论一、引言随着科
- VScode开发STM32
predestination836
vscodestm32单片机
由于keil5的界面太差(太丑),而VScode的界面,代码提醒等基本完杀keil5,所以VScode负责写代码,keil5负责代码的下载和调试VScode的下载和安装官网地址:https://code.visualstudio.com/但官网下载太慢,这里附上某盘的连接:链接:https://pan.baidu.com/s/10hL0aqUOlbe10fuSSDFS4w?pwd=3ouk提取码:
- STM32 按键密码系统的实现
2401-
stm32嵌入式硬件单片机
本次基于STM32F407开发板,来实现密码系统,输入四位密码,密码正确时LED1亮,密码错误时四个LED灯双闪。LED双闪代码简单的逻辑,让四个LED灯先亮然后再延时一会LED灯灭,循环4此实现双闪的效果。按键密码的实现前面我们写了一个按键按下返回1否则返回0的函数(在按键配置的那一章),根据这个函数来进行按键密码的实现,定义一个数组,使其按键一按下为密码一,按键二按下为密码二,按键三为密码三,
- 蓝桥杯单片机模块练习之AD/DA
我的头绝不是面团捏的
蓝桥杯单片机单片机
蓝桥杯单片机比赛系列6AD/DA转换AD/DA原理相关电路pcf8591器件地址代码解释修改代码AD自写代码ADDAAD/DA原理相关电路通过pcf8591芯片实现ad转换。板子上ad采集主要采集滑动变阻器的电压值和与光敏电阻串联电阻的电压值。ad为8位精度,采集电压0-5V对应的值为0-255。根据需要可以对读取的值进行调整。da也通过pcf8591输出,对应引脚在外部引出,在20PIN中19位
- 单片机基础模块学习——PCF8591芯片
promising-w
单片机单片机学习嵌入式硬件
一、A/D、D/A模块A——Analog模拟信号:连续变化的信号(很多传感器原始输出的信号都为此类信号)D——Digital数字信号:只有高电平和低电平两种变化(单片机芯片、微控制芯片所能处理的都是数字信号)下面是模拟信号和连续信号的区别为什么需要进行模拟信号和数字信号之间的转换呢?例如,传感器的模拟信号需要给单片机进行处理,但是单片机没法直接读取模拟信号此时需要进行A/D转换(模拟信号——>数字
- 04-标准库开发STM32-UART串口通信
坏柠
嵌入式开发笔记stm32单片机嵌入式硬件
六、USART同步/异步串口6.1基本介绍USART(UniversalSynchronous/AsynchronousReceiver/Transmitter)是STM32内部集成的硬件外设,用于实现通用同步/异步串行通信。USART不仅可以作为全双工通信接口,还支持多种通信模式,包括同步和异步通信。这使得STM32能够与其他设备(如单片机、电脑、模块等)进行高效的数据传输。USART与UART
- 蓝桥杯lesson2----数据类型
羽晨同学
蓝桥杯C++组蓝桥杯职场和发展
个人主页:羽晨同学个人格言:“成为自己未来的主人~”数据类型C++中提供了丰富的数据类型来描述生活中的各种数据,比如,整型,浮点型,字符类型等等。所谓‘类型’,就是相似的数据所拥有的共同特征,编译器只有知道了数据的类型,才知道怎么操作数据。接下来,我们谈论一下简单的数据类型。字符型char这个就是字符型。ASCII编码我们知道在计算机中所有的数据都是以二进制的形式存储的,那这些字符在内存中分别以什
- mbedtls | 06 - 非对称加密算法的配置与使用(RSA算法)
Mculover666
mbedtlsRSA
mbedtls系列文章mbedtls|01-移植mbedtls库到STM32的两种方法mbedtls|02-伪随机数生成器(ctr_drbg)的配置与使用mbedtls|03-单向散列算法的配置与使用(MD5、SHA1、SHA256、SHA512)mbedtls|04-对称加密算法的配置与使用(AES算法)mbedtls|05-消息认证码的配置与使用(HMAC算法、GCM算法)Demo工程源码ht
- 【STM32】直接内存访问DMA
大雨淅淅
嵌入式开发单片机嵌入式硬件stm32
目录一、工作原理二、组成部分三、优缺点3.1优点3.2缺点四、基于STM32的DMA驱动程序4.1硬件准备4.2软件准备4.3使用STM32CubeMX进行配置4.3.1选择芯片4.3.2配置时钟4.3.3配置串口4.3.4配置DMA4.3.5生成代码4.4编写DMA驱动代码4.5.代码解释4.6编译和下载4.7DMA中断处理(可选)直接内存访问(DirectMemoryAccess,简称DMA)
- 【STM32】STM32外设应用
大雨淅淅
嵌入式开发stm32
目录一、GPIO(通用输入输出)二、USART(通用同步异步收发传输器)三、ADC(模拟-数字转换器)四、TIM(定时器)STM32是意法半导体推出的一系列32位微控制器,具有丰富的外设资源。以下为你详细介绍几种常见STM32外设的应用:一、GPIO(通用输入输出)原理:GPIO是最基本的外设,可配置为输入或输出模式。当配置为输入模式时,可读取外部信号;配置为输出模式时,能向外部输出高或低电平。应
- STM32完全学习——0V5640的JPEG模式采集
小A159
学习
一、写在前面我参考的是买开发板的时候,普中送的资料里面的源码,他那个是用标准库写的,我将他的代码移植到了HAL库,有一些不一样的地方。由于标准库和HAL库的差别造成的。二、编程思路首先初始化OV5640模块,使用的是SCCB总线,和I2C很像,具体的就不说了,再就是将OV5640设置成JPEG输出模式,然后就是调整OV5640输出的图像的大小。下来就是开启DMA传输。然后每捕获一帧图像,DCMI会
- 详解单片机学的是什么?(电子硬件)
山羊硬件Time
硬件电子单片机硬件开发电子工程师硬件工程师电子硬件
大家好,我是山羊君Goat。单片机,对于每一个硬件行业的从业者或者在校电子类专业的学生,相信对于这个名词都不陌生,但是掌没掌握就另说了。那单片机到底学的是什么呢?其实单片机在生活中就非常常见,目前市面上主流的单片机系统就是51单片机和STM32单片机,很多地方都运用到了单片机来方便日常的生活,比如说图书城的门禁卡机,电梯,上厕所时的自动冲水系统,这些都是单片机的运用。(另外过山车的控制系统也是用的
- Microchip 系列:SAM L 系列 (基于 ARM Cortex-M0+)_(7).外设驱动开发
kkchenkx
单片机开发arm开发驱动开发架构java数据库嵌入式硬件
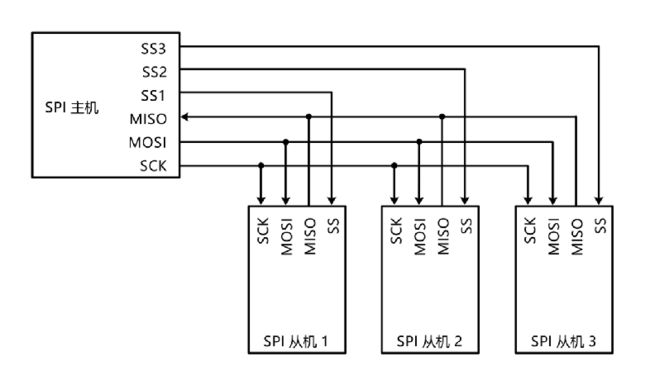
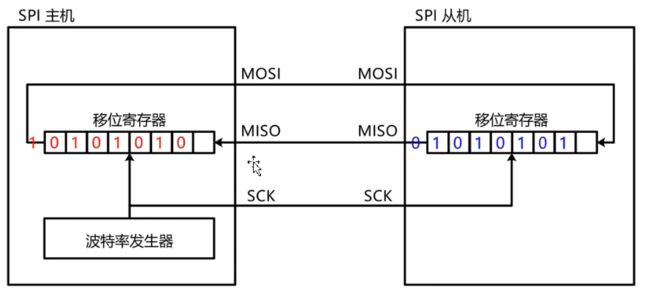
外设驱动开发在外设驱动开发中,我们将详细介绍如何使用Microchip的SAML系列单片机(基于ARMCortex-M0+)来开发各种外设驱动程序。这部分内容将涵盖常见的外设,如GPIO、UART、SPI、I2C、ADC和DAC等,并提供具体的代码示例和操作步骤。GPIO驱动开发GPIO引脚配置GPIO(GeneralPurposeInput/Output)是单片机中最基本的外设之一。通过配置GP
- 单片机内存管理剖析
jiuri_1215
MCU开发单片机嵌入式硬件
一、概述在单片机系统中,内存资源通常是有限的,因此高效的内存管理至关重要。合理地分配和使用内存可以提高系统的性能和稳定性,避免内存泄漏和碎片化问题。单片机的内存主要包括程序存储器(如Flash)和数据存储器(如RAM),其中数据存储器又可进一步分为静态数据区、栈区和堆区。动态内存分配主要发生在堆区,而sbrk、malloc和free这三个函数在堆内存管理中起着关键作用。二、sbrk:底层的内存边界
- 蓝桥杯 ALGO-1006 拿金币 动态规划 双解法 python
2401_84558326
程序员蓝桥杯动态规划python
但是我们看一下上图可以发现,有很多位置重复走过了(比如说(1,1),(2,1),(1,2)),走过的路就没必要再走一遍了,我们可以使用标记数组将记录走过位置以实现剪枝,提高执行效率。现在我们看一下代码实现:defdfs(x,y):n行n列范围外的位置没有意义,结束递归ifx>n-1ory>n-1:return0走到终点位置后将终点位置的金币返回ifx==n-1andy==n-1:returnnum
- 51单片机八位数码管0到F——16进制代码
李宇杰28
笔记1024程序员节
u8SMG_SEG[16]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x83,0xc6,0xa1,0x86,0x8e};//0-F
- STM32物联网(ESP-01S模块及STM32和ESP-01S通信方式介绍)
花落已飘
STM32框架式编程stm32物联网嵌入式硬件
文章目录前言一、ESP-01S模块介绍二、STM32和ESP-01S通信方式介绍三、什么是AT指令四、创建基础工程总结前言本篇文章我们开始正式进入STM32物联网的专栏,在这个专栏中将会带大家学习使用STM32进行联网,联网模块的话主要就是使用到了ESP-01SWIFI模块进行联网操作。一、ESP-01S模块介绍ESP-01S是一款基于ESP8266芯片的Wi-Fi模块,通常用于物联网(IoT)和
- Python蓝桥杯算法习题讲解——枚举算法进阶——扫雷矩阵问题
[木子加贝]
算法python自学python算法开发语言矩阵
一、题目描述在一个n行m列的方格图中有一些位置有地雷,另外一些位置为空,请为每个空位置标一个整数,表示周围八个相邻的方格中有多少个地雷。二、输入描述输入第1行包含两个整数n,m第2行到第n+1行每行包含m个整数,相邻整数之间用一个空格分隔,,如果对应的整数为0,表示这一格没有地雷,如果对应的整数为1,表示这一格有地雷。其中,1n,m100分钟后还是在当前三、输出描述输出n行,每行m个整数,相邻整数
- 嵌入式MCU笔记——GPIO
charlie114514191
嵌入式面试笔记整理单片机嵌入式硬件GPIO
目录模式初始化步骤速度几个典型的引用GPIO是通用输入输GPIO出的简写,也就是单片机的一个通用的输入输出接口。他的作用是:控制设备同外设之间的交互模式GPIO常见的输入输出模式有8钟模式。输入输出是对半开的。输入模式有四种:浮空输入、上拉输入、下拉输入、模拟输入浮空输入的引脚状态是不确定的,在没有外力作用的时候,我们并不知道此时此刻是高电平还是低电平。上拉输入是使用一个上拉电阻将状态确定为高电平
- Linux的Initrd机制
被触发
linux
Linux 的 initrd 技术是一个非常普遍使用的机制,linux2.6 内核的 initrd 的文件格式由原来的文件系统镜像文件转变成了 cpio 格式,变化不仅反映在文件格式上, linux 内核对这两种格式的 initrd 的处理有着截然的不同。本文首先介绍了什么是 initrd 技术,然后分别介绍了 Linux2.4 内核和 2.6 内核的 initrd 的处理流程。最后通过对 Lin
- maven本地仓库路径修改
bitcarter
maven
默认maven本地仓库路径:C:\Users\Administrator\.m2
修改maven本地仓库路径方法:
1.打开E:\maven\apache-maven-2.2.1\conf\settings.xml
2.找到
- XSD和XML中的命名空间
darrenzhu
xmlxsdschemanamespace命名空间
http://www.360doc.com/content/12/0418/10/9437165_204585479.shtml
http://blog.csdn.net/wanghuan203/article/details/9203621
http://blog.csdn.net/wanghuan203/article/details/9204337
http://www.cn
- Java 求素数运算
周凡杨
java算法素数
网络上对求素数之解数不胜数,我在此总结归纳一下,同时对一些编码,加以改进,效率有成倍热提高。
第一种:
原理: 6N(+-)1法 任何一个自然数,总可以表示成为如下的形式之一: 6N,6N+1,6N+2,6N+3,6N+4,6N+5 (N=0,1,2,…)
- java 单例模式
g21121
java
想必单例模式大家都不会陌生,有如下两种方式来实现单例模式:
class Singleton {
private static Singleton instance=new Singleton();
private Singleton(){}
static Singleton getInstance() {
return instance;
}
- Linux下Mysql源码安装
510888780
mysql
1.假设已经有mysql-5.6.23-linux-glibc2.5-x86_64.tar.gz
(1)创建mysql的安装目录及数据库存放目录
解压缩下载的源码包,目录结构,特殊指定的目录除外:
- 32位和64位操作系统
墙头上一根草
32位和64位操作系统
32位和64位操作系统是指:CPU一次处理数据的能力是32位还是64位。现在市场上的CPU一般都是64位的,但是这些CPU并不是真正意义上的64 位CPU,里面依然保留了大部分32位的技术,只是进行了部分64位的改进。32位和64位的区别还涉及了内存的寻址方面,32位系统的最大寻址空间是2 的32次方= 4294967296(bit)= 4(GB)左右,而64位系统的最大寻址空间的寻址空间则达到了
- 我的spring学习笔记10-轻量级_Spring框架
aijuans
Spring 3
一、问题提问:
→ 请简单介绍一下什么是轻量级?
轻量级(Leightweight)是相对于一些重量级的容器来说的,比如Spring的核心是一个轻量级的容器,Spring的核心包在文件容量上只有不到1M大小,使用Spring核心包所需要的资源也是很少的,您甚至可以在小型设备中使用Spring。
- mongodb 环境搭建及简单CURD
antlove
WebInstallcurdNoSQLmongo
一 搭建mongodb环境
1. 在mongo官网下载mongodb
2. 在本地创建目录 "D:\Program Files\mongodb-win32-i386-2.6.4\data\db"
3. 运行mongodb服务 [mongod.exe --dbpath "D:\Program Files\mongodb-win32-i386-2.6.4\data\
- 数据字典和动态视图
百合不是茶
oracle数据字典动态视图系统和对象权限
数据字典(data dictionary)是 Oracle 数据库的一个重要组成部分,这是一组用于记录数据库信息的只读(read-only)表。随着数据库的启动而启动,数据库关闭时数据字典也关闭 数据字典中包含
数据库中所有方案对象(schema object)的定义(包括表,视图,索引,簇,同义词,序列,过程,函数,包,触发器等等)
数据库为一
- 多线程编程一般规则
bijian1013
javathread多线程java多线程
如果两个工两个以上的线程都修改一个对象,那么把执行修改的方法定义为被同步的,如果对象更新影响到只读方法,那么只读方法也要定义成同步的。
不要滥用同步。如果在一个对象内的不同的方法访问的不是同一个数据,就不要将方法设置为synchronized的。
- 将文件或目录拷贝到另一个Linux系统的命令scp
bijian1013
linuxunixscp
一.功能说明 scp就是security copy,用于将文件或者目录从一个Linux系统拷贝到另一个Linux系统下。scp传输数据用的是SSH协议,保证了数据传输的安全,其格式如下: scp 远程用户名@IP地址:文件的绝对路径
- 【持久化框架MyBatis3五】MyBatis3一对多关联查询
bit1129
Mybatis3
以教员和课程为例介绍一对多关联关系,在这里认为一个教员可以叫多门课程,而一门课程只有1个教员教,这种关系在实际中不太常见,通过教员和课程是多对多的关系。
示例数据:
地址表:
CREATE TABLE ADDRESSES
(
ADDR_ID INT(11) NOT NULL AUTO_INCREMENT,
STREET VAR
- cookie状态判断引发的查找问题
bitcarter
formcgi
先说一下我们的业务背景:
1.前台将图片和文本通过form表单提交到后台,图片我们都做了base64的编码,并且前台图片进行了压缩
2.form中action是一个cgi服务
3.后台cgi服务同时供PC,H5,APP
4.后台cgi中调用公共的cookie状态判断方法(公共的,大家都用,几年了没有问题)
问题:(折腾两天。。。。)
1.PC端cgi服务正常调用,cookie判断没
- 通过Nginx,Tomcat访问日志(access log)记录请求耗时
ronin47
一、Nginx通过$upstream_response_time $request_time统计请求和后台服务响应时间
nginx.conf使用配置方式:
log_format main '$remote_addr - $remote_user [$time_local] "$request" ''$status $body_bytes_sent "$http_r
- java-67- n个骰子的点数。 把n个骰子扔在地上,所有骰子朝上一面的点数之和为S。输入n,打印出S的所有可能的值出现的概率。
bylijinnan
java
public class ProbabilityOfDice {
/**
* Q67 n个骰子的点数
* 把n个骰子扔在地上,所有骰子朝上一面的点数之和为S。输入n,打印出S的所有可能的值出现的概率。
* 在以下求解过程中,我们把骰子看作是有序的。
* 例如当n=2时,我们认为(1,2)和(2,1)是两种不同的情况
*/
private stati
- 看别人的博客,觉得心情很好
Cb123456
博客心情
以为写博客,就是总结,就和日记一样吧,同时也在督促自己。今天看了好长时间博客:
职业规划:
http://www.iteye.com/blogs/subjects/zhiyeguihua
android学习:
1.http://byandby.i
- [JWFD开源工作流]尝试用原生代码引擎实现循环反馈拓扑分析
comsci
工作流
我们已经不满足于仅仅跳跃一次,通过对引擎的升级,今天我测试了一下循环反馈模式,大概跑了200圈,引擎报一个溢出错误
在一个流程图的结束节点中嵌入一段方程,每次引擎运行到这个节点的时候,通过实时编译器GM模块,计算这个方程,计算结果与预设值进行比较,符合条件则跳跃到开始节点,继续新一轮拓扑分析,直到遇到
- JS常用的事件及方法
cwqcwqmax9
js
事件 描述
onactivate 当对象设置为活动元素时触发。
onafterupdate 当成功更新数据源对象中的关联对象后在数据绑定对象上触发。
onbeforeactivate 对象要被设置为当前元素前立即触发。
onbeforecut 当选中区从文档中删除之前在源对象触发。
onbeforedeactivate 在 activeElement 从当前对象变为父文档其它对象之前立即
- 正则表达式验证日期格式
dashuaifu
正则表达式IT其它java其它
正则表达式验证日期格式
function isDate(d){
var v = d.match(/^(\d{4})-(\d{1,2})-(\d{1,2})$/i);
if(!v) {
this.focus();
return false;
}
}
<input value="2000-8-8" onblu
- Yii CModel.rules() 方法 、validate预定义完整列表、以及说说验证
dcj3sjt126com
yii
public array rules () {return} array 要调用 validate() 时应用的有效性规则。 返回属性的有效性规则。声明验证规则,应重写此方法。 每个规则是数组具有以下结构:array('attribute list', 'validator name', 'on'=>'scenario name', ...validation
- UITextAttributeTextColor = deprecated in iOS 7.0
dcj3sjt126com
ios
In this lesson we used the key "UITextAttributeTextColor" to change the color of the UINavigationBar appearance to white. This prompts a warning "first deprecated in iOS 7.0."
Ins
- 判断一个数是质数的几种方法
EmmaZhao
Mathpython
质数也叫素数,是只能被1和它本身整除的正整数,最小的质数是2,目前发现的最大的质数是p=2^57885161-1【注1】。
判断一个数是质数的最简单的方法如下:
def isPrime1(n):
for i in range(2, n):
if n % i == 0:
return False
return True
但是在上面的方法中有一些冗余的计算,所以
- SpringSecurity工作原理小解读
坏我一锅粥
SpringSecurity
SecurityContextPersistenceFilter
ConcurrentSessionFilter
WebAsyncManagerIntegrationFilter
HeaderWriterFilter
CsrfFilter
LogoutFilter
Use
- JS实现自适应宽度的Tag切换
ini
JavaScripthtmlWebcsshtml5
效果体验:http://hovertree.com/texiao/js/3.htm
该效果使用纯JavaScript代码,实现TAB页切换效果,TAB标签根据内容自适应宽度,点击TAB标签切换内容页。
HTML文件代码:
<!DOCTYPE html>
<html xmlns="http://www.w3.org/1999/xhtml"
- Hbase Rest API : 数据查询
kane_xie
RESThbase
hbase(hadoop)是用java编写的,有些语言(例如python)能够对它提供良好的支持,但也有很多语言使用起来并不是那么方便,比如c#只能通过thrift访问。Rest就能很好的解决这个问题。Hbase的org.apache.hadoop.hbase.rest包提供了rest接口,它内嵌了jetty作为servlet容器。
启动命令:./bin/hbase rest s
- JQuery实现鼠标拖动元素移动位置(源码+注释)
明子健
jqueryjs源码拖动鼠标
欢迎讨论指正!
print.html代码:
<!DOCTYPE html>
<html>
<head>
<meta http-equiv=Content-Type content="text/html;charset=utf-8">
<title>发票打印</title>
&l
- Postgresql 连表更新字段语法 update
qifeifei
PostgreSQL
下面这段sql本来目的是想更新条件下的数据,可是这段sql却更新了整个表的数据。sql如下:
UPDATE tops_visa.visa_order
SET op_audit_abort_pass_date = now()
FROM
tops_visa.visa_order as t1
INNER JOIN tops_visa.visa_visitor as t2
ON t1.
- 将redis,memcache结合使用的方案?
tcrct
rediscache
公司架构上使用了阿里云的服务,由于阿里的kvstore收费相当高,打算自建,自建后就需要自己维护,所以就有了一个想法,针对kvstore(redis)及ocs(memcache)的特点,想自己开发一个cache层,将需要用到list,set,map等redis方法的继续使用redis来完成,将整条记录放在memcache下,即findbyid,save等时就memcache,其它就对应使用redi
- 开发中遇到的诡异的bug
wudixiaotie
bug
今天我们服务器组遇到个问题:
我们的服务是从Kafka里面取出数据,然后把offset存储到ssdb中,每个topic和partition都对应ssdb中不同的key,服务启动之后,每次kafka数据更新我们这边收到消息,然后存储之后就发现ssdb的值偶尔是-2,这就奇怪了,最开始我们是在代码中打印存储的日志,发现没什么问题,后来去查看ssdb的日志,才发现里面每次set的时候都会对同一个key