Arduino ESP32 FreeRTOS
文章目录
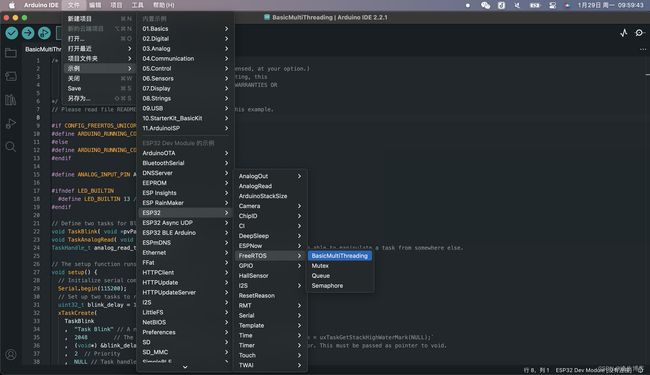
- 基本多线程Arduino示例
- 配置
- 创建任务
- 消息队列
- 信号量
- 定时器
- 互拆量(Mutex)
- 事件组(Event Group)
基本多线程Arduino示例
配置
#if CONFIG_FREERTOS_UNICORE
#define ARDUINO_RUNNING_CORE 0
#else
#define ARDUINO_RUNNING_CORE 1
#endif
当FreeRTOS配置为单核模式时,ARDUINO_RUNNING_CORE宏被定义为0,表示应用程序在主核心上运行。而当FreeRTOS配置为双核模式时,ARDUINO_RUNNING_CORE宏被定义为1,表示应用程序在第二个核心上运行。
在ESP32上,可以使用两个独立的处理器核心来运行应用程序和操作系统。在双核模式下,一个核心运行FreeRTOS调度程序,另一个核心则可用于运行用户应用程序。这种方式可以提高系统性能和响应速度。
创建任务
#include -
例子中,setup()函数用于初始化代码,而loop()函数为空。FreeRTOS的任务(task1和task2)被创建在setup()函数中,因为它们会在整个程序运行期间持续执行。
-
请注意,在ESP32上,FreeRTOS自身负责任务的调度,因此在loop()中通常不需要编写额外的代码。任务的具体实现应该在各自的任务函数中。这样设计的好处是能够更灵活地管理任务的执行和调度。
消息队列
#include -
例子中,sender_task任务负责产生随机数据并将其发送到消息队列中,而receiver_task任务则负责从消息队列中接收数据并进行处理。在setup()函数中,首先创建了一个消息队列 (xQueue = xQueueCreate(5, sizeof(int)),然后创建了两个FreeRTOS任务,分别执行sender_task和receiver_task。
-
请注意,vTaskDelay函数用于任务之间的延时,以防止任务频繁执行。此外,在Arduino中使用Serial对象输出调试信息。
信号量
#include -
例子中,task1和task2任务都尝试获取一个互斥信号量 (xSemaphore)。如果信号量可用,任务就会获得对共享资源的访问权限,执行一些操作,然后释放信号量。如果信号量当前被其他任务占用,任务将等待,直到信号量可用。
-
请注意,在实际应用中,信号量可用于保护共享资源,以确保多个任务之间对资源的访问是同步的,避免竞态条件。
定时器
#include - 定时器可以用于定时执行特定的任务或操作。
互拆量(Mutex)
#include - 互斥量用于保护共享资源,确保在任何时刻只有一个任务能够访问临界区的代码。
事件组(Event Group)
#include - 事件组允许任务等待和设置事件标志,用于任务间的同步和通信。