解锁辅助驾驶新境界:基于昇腾 AI 异构计算架构 CANN 的应用探秘
博客主页:倔强的石头的CSDN主页
Gitee主页:倔强的石头的gitee主页
⏩ 文章专栏:《AI大模型》
期待您的关注

目录
一、引言
二、CANN 是什么
1. 异构计算与人工智能的关系
2. CANN 的定义和作用
3. CANN 的技术优势
三、基于 CANN 的辅助驾驶 AI 应用原理
1. 目标检测算法
2. 智能检测流程
3. 算力平台支持
四、基于 CANN 的辅助驾驶 AI 优势
1. 高效训练
2. 精准检测
3. 快速编程
4. 产业应用
五、部署实操
六、结语
一、引言
在当今科技飞速发展的时代,汽车行业正迎来一场智能化的变革。基于昇腾 AI 异构计算架构 CANN 的辅助驾驶 AI 应用,为这场变革注入了强大的动力。
昇腾 AI 异构计算架构 CANN(Compute Architecture for Neural Networks)是华为针对 AI 场景推出的异构计算架构,向上支持多种 AI 框架,包括 MindSpore、PyTorch、TensorFlow 等,向下服务 AI 处理器与编程,发挥承上启下的关键作用,是提升昇腾 AI 处理器计算效率的关键平台。同时针对多样化应用场景,提供多层次编程接口,支持用户快速构建基于昇腾平台的 AI 应用和业务。
辅助驾驶作为汽车智能化的重要组成部分,旨在借助汽车对周围环境的自动感知和分析,让驾驶员预先察觉可能发生的危险,有效增加汽车驾驶的舒适性和安全性。基于昇腾 AI 异构计算架构 CANN 的辅助驾驶 AI 应用,具备强大的计算能力和高效的编程接口,为实现这一目标提供了有力的支持。
在接下来的内容中,我们将深入阐述基于昇腾 AI 异构计算架构 CANN 的辅助驾驶 AI 应用的原理和优势,带您领略这一创新技术的魅力。
二、CANN 是什么

1. 异构计算与人工智能的关系
在当今人工智能高速发展的时代,异构计算在其中扮演着至关重要的角色。
近年来,人工智能广泛融入日常生活,如智能助手、人脸识别摄像头、自动驾驶汽车等。要让机器拥有人类技能,就需搭建类似人类大脑的 “神经网络”,即 AI 算法或模型,并通过大量数据训练。然而,这个过程涉及高度复杂的算法和巨大的计算量,以 GPT-3 为例,参数量达 1750 亿,样本大小 45TB,单次训练时间以月为单位,如何提高计算效率成为人工智能的核心问题。
在人工智能计算中,多涉及矩阵或向量的乘法和加法,CPU 这类通用处理器处理此类计算需求效率较低。现实应用中,主要利用擅长大规模并行计算任务的 AI 加速器完成,如 NPU(昇腾 AI 处理器)等专用处理器。由于计算的多样性,在这些加速器内部存在非常多不同架构的计算单元,异构计算就是在同一计算系统集成不同类型或架构的处理单元,以更有效地执行不同类型的任务。为充分利用这些异构算力,就需要构建一套统一的编译优化和编程接口体系,实现底层多样算力与上层框架 / 算法的解耦、互通,发挥不同处理器的优势,通过协同工作提高整个系统的性能、能效和灵活性。
2. CANN 的定义和作用
CANN(Compute Architecture for Neural Networks)是华为针对 AI 场景推出的异构计算架构,对上支持 PyTorch、TensorFlow 以及昇思 MindSpore 等业界主流 AI 框架,对下使能昇腾 AI 处理器,发挥承上启下的关键作用,是提升昇腾 AI 处理器计算效率的关键平台。同时针对多样化应用场景,提供高效易用的编程接口,支持用户快速构建基于昇腾平台的 AI 应用和业务。
3. CANN 的技术优势
1.极致性能:
CANN 从 2018 年的第一个版本发展至今,经过多个版本的迭代,积累了众多技术优势。
- 为让 AI 任务在异构硬件上加速计算,CANN 对整个计算图进行编译优化。它把计算图做加工和精简,大图变成若干子图,并根据各异构硬件上擅长处理的计算任务类型,将各计算子图下发到 CPU、NPU、甚至是 NPU 内部更小的异构单元上执行。
- 同时,CANN 通过类似工厂流水线的方式让计算任务自动并行起来,提高整个系统的性能。
- 除了针对计算图的优化,CANN 更是将计算图中的节点(即 AI 算子)适配昇腾硬件进行了深度优化,并预置到内部的加速库中。其中不仅有包含常用深度学习算法计算类型的 NN(NeuralNetwork)算子库、能够提供高性能媒体数据处理能力的 DVPP(Digital Vision Pre-Processing)算子库、分布式训练中提供卡间高效数据传输的 HCCL(Huawei Collective Communication Library)算子库,更有覆盖 Transformer 网络大模型结构泛化的高性能融合算子库。
2.极简易用:
在编程易用性方面,CANN 能够端到端使能从算子到模型算法的开发及部署,帮助开发者快速构建基于昇腾平台的 AI 应用及业务。
CANN 广泛支持业界主流深度学习框架,包括昇思 MindSpore、PyTorch、TensorFlow、PaddlePaddle、计图 Jittor 等等,支持从 GPU 生态低成本迁移至昇腾生态。开发者可以选择继续使用原有框架和算法,仅切换底层硬件即可;可以选择迁移到华为开源的昇思 MindSpore 框架获得昇腾全栈能力;也完全可以基于 CANN 进行原生开发,目前 Pytorch 已支持昇腾设备接入,意味着开发者可直接在昇腾设备上使用 PyTorch 原生算法开发。在算法迁移或开发过程中,如果发现某些算子性能达不到预期要求,或者想针对新的业务场景开发新功能,就需要进行算子开发。在这个维度上,CANN 提供了面向算子开发场景的昇腾 Ascend C 编程语言,它原生支持 C/C++ 编程规范,通过多层接口抽象、并行编程范式、孪生调试等技术,极大提高了算子的开发效率,帮助 AI 开发者低成本完成算子开发和模型调优部署。
三、基于 CANN 的辅助驾驶 AI 应用原理
1. 目标检测算法
以 YOLOv4 为例,其算法结构和流程具有独特之处。
- 算法结构:
-
- Backbone 层:通过 CSPDarknet53 框架在不同图像细粒度上聚合并形成具备图像特征的卷积神经网络,主要承担图像特征提取的重任。例如在处理各种复杂的交通场景图像时,能够有效地提取出车辆、道路等关键特征。
-
- Neck 层:由 SPP 或 PAN 等一系列网络层组成,这些层能够混合和组合图像特征,提取一些更复杂的特性,并将图像特征传递到预测层。比如在辅助驾驶中,对于不同光照条件下的车辆特征进行进一步的整合和优化。
-
- Head 层:对图像特征进行预测,生成边界合并预测类别。它能够准确地确定目标物体的位置和类别,为辅助驾驶系统提供关键的决策依据。
- 算法流程:
-
- 图像分割阶段:首先,将图像分割为若干个网格(grid cell),每个网格负责生成 3 个包围框(bounding box),以及对应置信度。这就像是在一个大的拼图中,每个小网格都在尝试找到属于自己的那一块目标物体。
-
- 非极大值抑制处理阶段:接着,YOLOv4 会用非极大值抑制算法(NMS),将与标注数据(ground truth)重合度低的 bounding box 剔除。这个过程就像是在筛选出最准确的目标检测框,去除那些可能是误报的框。
-
- 回归处理阶段:经过回归处理后,最后剩下的 bounding box 所在的位置就是 YOLOv4 预测目标所在的位置。通过这种方式,YOLOv4 能够在复杂的交通环境中准确地检测出车辆、行人等目标物体。
2. 智能检测流程
借助 AscendCL 编程接口对输入视频进行预测推理,可实现对车辆及车道线的智能检测。具体步骤如下:
- 首先,利用 AscendCL 的图像预处理能力,将输入视频的每一帧图像进行处理,使其符合模型输入的标准格式和尺寸。例如,通过缩放、填充等操作,将图像调整为适合 YOLOv4 模型输入的大小。
- 然后,将处理后的图像输入到已经训练好的模型中进行推理。在这个过程中,AscendCL 负责模型的加载与执行,充分发挥昇腾 AI 处理器的强大算力。
- 最后,对模型的输出结果进行后处理,包括非极大值抑制等操作,以得到准确的车辆及车道线检测结果。
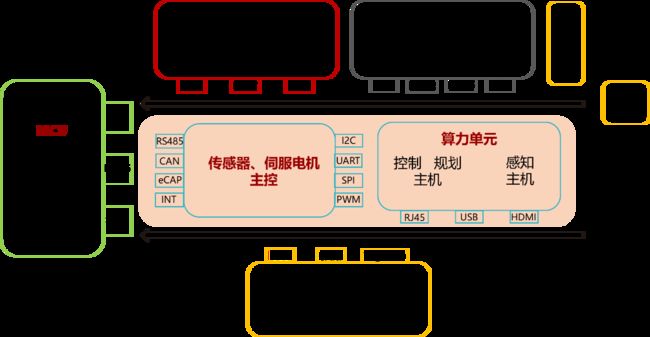
3. 算力平台支持
昇腾 AI 基础软硬件平台提供强大算力,CANN 进行软硬件协同优化,释放硬件算力,加速模型训练。
- 强大算力基础:昇腾 AI 基础软硬件平台依托昇腾 AI 处理器强大的算力,为辅助驾驶 AI 应用提供了坚实的计算基础。无论是处理大规模的交通视频数据,还是进行复杂的模型训练,都能轻松应对。
- CANN 协同优化:CANN 作为异构计算架构,通过软硬件协同优化,充分释放硬件算力。例如,在全新一代 CANN 5.0 版本中,通过图级和算子级的编译优化、自动调优等软硬件深度协同优化,全面释放硬件澎湃算力,达到 AI 模型训练性能的大幅提升。针对包括分类、检测、NLP、语义分割在内的常用模型训练场景,均可实现性能翻番,让整个训练过程快到 “飞” 起。
- 算法框架转换:AI 算法模型可以基于不同 AI 框架定义,而 CANN 能够轻松将华为开源 AI 框架昇思 MindSpore,以及 TensorFlow、PyTorch、Caffe 等其他常用 AI 框架转换成标准化的 Ascend IR (Intermediate Representation) 表达的图格式,屏蔽 AI 框架差异,让开发者快速搞定算法迁移,即刻体验昇腾 AI 处理器的澎湃算力。
四、基于 CANN 的辅助驾驶 AI 优势
1. 高效训练
CANN 5.0 版本在高效训练方面表现卓越。通过图级和算子级的编译优化、自动调优等技术,实现性能翻番,让训练过程快到 “飞” 起。例如在经典模型 BERT 的训练中,原本需要较长时间,在 CANN 5.0 的加持下,训练时间大幅缩短,仅需 2.69 分钟就能完成训练。同时,对于常用的小模型训练场景,如分类、检测、语义分割、NLP 等,性能提升同样明显。无论是大规模集群训练还是小模型训练,CANN 5.0 都能通过其先进的技术,为开发者提供高效的训练体验。
2. 精准检测
基于 CANN 的辅助驾驶 AI 在精准检测方面具有显著优势。采用先进的目标检测算法,如以 YOLOv4 为代表的目标检测算法,能够有效解决影响检测准确性的问题,如汽车外观、光照等因素的干扰。YOLOv4 算法结构由 Backbone 层、Neck 层和 Head 层组成,Backbone 层通过 CSPDarknet53 框架提取图像特征,Neck 层混合和组合图像特征,Head 层计算预测输出。在流程方面,首先将图像分割为若干网格,每个网格生成包围框和置信度,接着用非极大值抑制算法剔除重合度低的 bounding box,最后经过回归处理确定目标位置。此外,CANN 还开源了高性能的通用目标检测与识别一站式方案,支持多格式输入和输出、轻松替换和串接模型、高效数据预处理、图片数和分辨率可变场景定制、多路多线程高性能编程以及高效后处理计算等特性,进一步提升了检测的准确性和灵活性。
3. 快速编程
AscendCL 接口在辅助驾驶 AI 应用中发挥了重要作用,使其具备快速编程的优势。AscendCL 是一套用于开发深度神经网络推理应用的 C 语言 API 库,兼具运行时资源管理、模型加载与执行、图像预处理等能力。开发者可以借助 AscendCL 轻松实现图片分类、目标检测等各类 AI 应用。例如在通用目标检测与识别一站式方案中,基于 AscendCL 接口对数据预处理、模型推理、模型后处理等 AI 核心计算逻辑进行模块化组装,实现了车辆检测和车身颜色识别基础功能,同时支持多格式输入和输出、轻松替换和串接模型等特性,为开发者提供了良好的编程选择。
4. 产业应用
西安交大团队和新生代开发者利用 CANN 解决高级辅助驾驶的关键难题,推动自动驾驶产业转型升级。此外,众多汽车企业和科技企业也竞相加入辅助驾驶这条行业赛道,力求不断突破。基于昇腾 AI 异构计算架构 CANN 的辅助驾驶 AI 应用,不仅可以实时检测路面车辆,还能计算出车距,辅助驾驶员进行决策。如华为开发的一套基于 CANN 的简易版辅助驾驶 AI 应用,具备车辆检测、车距计算等基本功能,为辅助驾驶入门级项目提供了很好的范例。同时,CANN 还为机器人产业的发展提供了强大的技术支持,昇腾 AI 全栈技术和产品构筑了人工智能的算力基座,赋能上层应用,为辅助驾驶等领域的发展带来了更多可能性。
五、部署实操

以下是基于 CANN 的辅助驾驶 AI 应用的代码示例,包括环境准备、模型下载、样例运行和结果查看等步骤。
一、环境准备
- 安装昇腾 AI 异构计算架构 CANN,确保版本不低于要求的版本,一般建议安装最新版本以获得更好的性能和功能支持。安装过程可以参考华为官方文档,根据不同的操作系统和硬件环境进行相应的配置。
- 安装必要的软件依赖,如 Python 解释器。根据文档要求,Python 版本为 3.7 - 3.9 均可,并且在安装时要注意确保 CANN 支持所安装的 Python 版本。可以参考以下步骤进行安装:
-
- 下载并安装合适的 Python 版本,确保安装过程中正确配置环境变量。
-
- 在安装完成后,对于使用 MindStudio 的情况,如果在打开项目时提示 “No Python interpreter configured for the module”,可以点击 “Configure Python interpreter” 进行解释器路径的配置。点击 “Edit” 选择本地的 Python 解释器路径,然后点击 “OK”。
二、模型下载
以 YOLOV4_coco_detection_car_video 样例为例,进行模型下载:
- 获取源码包:
-
- 命令行方式下载:在开发环境中,非 root 用户命令行中执行以下命令下载源码仓。cd ${HOME},git clone samples: CANN Samples。如果需要切换到其它 tag 版本,以 v0.5.0 为例,可执行以下命令:git checkout v0.5.0。
-
- 压缩包方式下载:在 samples 仓右上角选择【克隆 / 下载】下拉框并选择【下载 ZIP】。将 ZIP 包上传到开发环境中的普通用户家目录中,例如:${HOME}/ascend-samples-master.zip。然后在开发环境中,执行以下命令,解压 zip 包:cd ${HOME},unzip ascend-samples-master.zip。
- 获取原始网络模型:
-
- cd${HOME}/samples/python/level2_simple_inference/2_object_detection/YOLOV4_coco_detection_car_video/model。
-
- wget https://obs-9be7.obs.cn-east-2.myhuaweicloud.com/003_Atc_Models/AE/ATC%20Model/YOLOv4_onnx/yolov4_dynamic_bs.onnx。
-
- 使用 atc 工具进行模型转换:atc--model=./yolov4_dynamic_bs.onnx --framework=5 --output=yolov4_bs1--input_format=NCHW --soc_version=Ascend310--input_shape="input:1,3,608,608"--out_nodes="Conv_434:0;Conv_418:0;Conv_402:0"。
三、样例运行
- 开发环境与运行环境合一部署时,跳过步骤 1,直接执行步骤 2 即可。
- 执行以下命令,将开发环境的 YOLOV4_coco_detection_car_video 目录上传到运行环境中,例如 /home/HwHiAiUser,并以 HwHiAiUser(运行用户)登录运行环境(Host)。scp -r$HOME/samples/python/level2_simple_inference/2_object_detection/YOLOV4_coco_detection_car_video [email protected]:/home/HwHiAiUser,ssh [email protected],cd ${HOME}/YOLOV4_coco_detection_car_video/src。
- 运行可执行文件:python3.6 yolov4.py../data/test.mp4。
四、结果查看
运行完成后,结果视频保存在 out 目录下。可以通过查看该目录下的视频文件,观察基于 CANN 的辅助驾驶 AI 应用对输入视频的预测推理结果。
六、结语
基于昇腾 AI 异构计算架构 CANN 的辅助驾驶 AI 应用具有强大的原理和优势,为汽车行业的智能化发展提供了有力支持。
通过图文并茂的介绍和代码示例,希望读者能够深入了解这一技术,为未来的创新应用奠定基础。