高效构建仓库AGV管理系统:基于Python的路径规划与货架管理
在现代化仓储中,高效管理自动引导车辆(AGV)是提升生产力和管理效率的关键。作为一种智能仓储设备,AGV可以自主完成物料的搬运,但如何实现AGV的路径规划和货架管理?本篇博客将通过一个Python项目,带你深度了解如何实现一个具备路径规划与货架管理功能的仓库管理系统(WMS)。在此过程中,你将学习到AGV的路径规划、图像可视化、节拍管理等核心技术。无论你是对物流技术感兴趣,还是对Python项目管理跃跃欲试,这个项目都将为你打开一个全新的视角。
项目目标
在本项目中,我们要实现一个简化的仓库管理系统,帮助仓库中的10台AGV高效完成物品的存储和取货。AGV将在系统的指挥下自动选择最佳路线,并按照特定的节拍完成一系列入库和出库操作。这项任务包含了路径规划、货架管理、AGV电池续航、充电管理等实际问题,最终将这些动态变化实时呈现出来。关键任务包括:
- 路径规划与阻塞处理:AGV需要动态规划路径,并避免在狭窄空间中相互阻挡。
- 货架状态管理:货架状态分为占用和空闲,带有上架和下架的动态显示。
- AGV状态监控:包括AGV的负载状态、电池状态、距离管理等。
- 节拍管理与动画渲染:我们将实现系统的节拍管理并生成图片序列,将其渲染为视频。
技术栈与系统结构
- Python基础:Python的面向对象编程(OOP)、数据结构。
- Matplotlib:实现实时的仓库状态可视化,并动态生成图片序列。
- MoviePy:将图片序列渲染成视频。
- 文件操作和性能优化:创建多线程文件保存和图片合成操作。
项目搭建与实现步骤
第一步:项目结构与数据准备
项目结构如下:
project/
│── main.py # 主运行脚本
│── agv.py # AGV类
│── shelf_manager.py # 货架管理
│── operation.py # 出入库管理
│── visualizer.py # 仓库可视化
│── map_data.py # 仓库地图数据
│── frames/ # 存储生成的帧图像
│── simulation.mp4 # 最终生成的视频
在 map_data.py 中,预先定义好仓库内的各个点坐标数据,包括road_points(道路点)、rack_points(货架点)、dock_points(接驳点)和charge_points(充电点)。这些点数据将为AGV路径规划提供参照。
第二步:AGV路径规划与任务分配
AGV的路径规划实现了从接驳点到货架位置的最短路径寻找。每台AGV都具有如下特性:
- 位置:当前坐标。
- 电池状态:动态电量监控,到达阈值后自动前往充电。
- 负载状态:标识是否满载货物。
- 路径规划与阻塞检测:实现简单路径规划,自动避让其他AGV,防止拥堵。
在AGV任务分配时,我们采用了一个二元组序列,其中(+1, dock_id)表示入库任务,(-1, dock_id)表示出库任务,并规定初始仓库为空,自动在20%节拍内完成初始入库操作。在货架满载和空载的情况下,AGV会根据状态判断任务优先级,确保安全和高效。
代码示例:
# AGV任务分配逻辑
def assign_store_task(self, dock_id):
# 根据接驳点dock_id确定任务
self.task = {'type': 'store', 'dock_id': dock_id, 'step': 'to_dock'}
self.status = 'assigned'
self.destination = dock_points[dock_id - 1]
第三步:仓库状态可视化与动态节拍渲染
为了让整个仓库的动态过程清晰可见,我们使用 matplotlib 实现了仓库的图形化展示。具体步骤为:
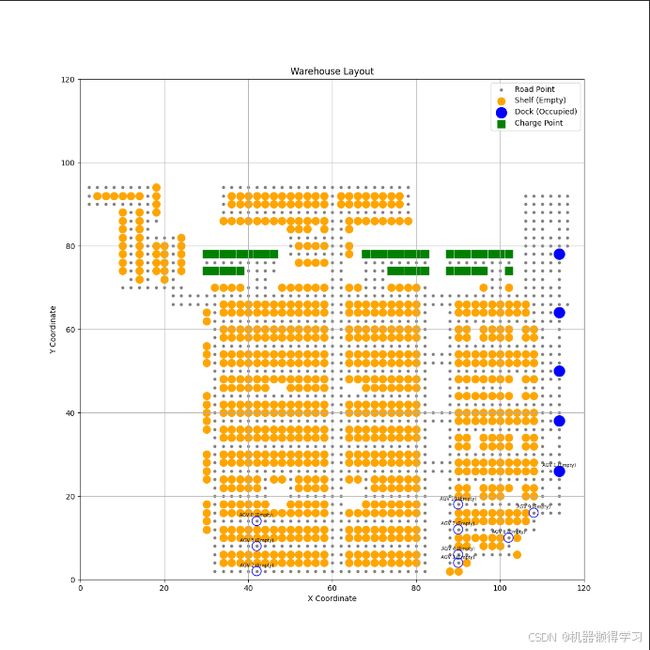
- 路径点绘制:道路点显示为灰色小圆点,接驳点显示为蓝色圆圈。
- 货架状态管理:通过货架点的大小来显示上架与下架的状态,使用橙色标识货架状态。
- AGV状态显示:AGV空载时显示为空心蓝色环,满载时为实心蓝色圆;充电状态则为绿色星标。
在生成每帧图片时,根据当前节拍进行状态刷新,并将图片保存到指定目录下。在生成了足够多的图片后,我们使用 MoviePy 将这些帧图片合成为MP4视频。
# 仓库状态的动态展示
def display_warehouse(self, beat):
plt.figure(figsize=(12, 12))
for agv in self.agvs:
self.display_agv(agv) # 绘制AGV位置和状态
plt.savefig(os.path.join(self.frames_dir, f'frame_{self.frame_counter:05d}.png'))
self.frame_counter += 1
plt.close()
第四步:生成视频与多节拍控制
在 main.py 中,我们使用节拍控制AGV的运行,使每个节拍完成一次任务并保存一帧图片。这样可以有效模拟仓库动态过程,生成的帧图片则按序保存,每隔300帧合成一个视频,以确保视频长度控制在合理范围。整个过程以 time.sleep() 控制节拍,便于调试和查看。
第五步:项目运行效果展示
成功运行后,我们会生成一个动态展示仓库管理的MP4视频。从接驳点到货架的路径、AGV的充电状态切换以及货架状态的动态变化都能在视频中清晰展示。通过这种方式,我们实现了AGV的路径规划与仓库管理的初步构想,为将来更复杂的仓储管理系统提供了灵感和实现思路。
未来扩展
在这个项目的基础上,可以考虑以下扩展:
- 路径优化算法:引入A*或Dijkstra算法,进一步优化AGV的路径规划,提升仓储效率。
- 多任务并行调度:通过调度算法优化多台AGV的协同作业。
- 实时监控和数据分析:通过实时数据获取AGV的电量消耗、任务完成时间等关键数据,优化运营成本。
总结
通过该项目,我们从零开始构建了一个AGV管理的仓库模拟系统。这个Python项目不仅帮助我们理解了AGV路径规划的基本逻辑,还学习了如何将动态图像合成为视频,更形象地展示仓储流程。如果你对现代仓储管理技术充满好奇,动手实现类似的项目会是一个非常棒的体验!