【STM32】智能避障红外小车
文章目录
-
- 直流电机
-
- ` motor.c / motor.h `
- 红外对管
-
- 红外循迹
- 利用脉冲宽度调制技术(PWM)控制电机转速
- 避障
- `red.c / red.h`
编译环境:
keil5 SourceInsight STM32F103X
原理图:

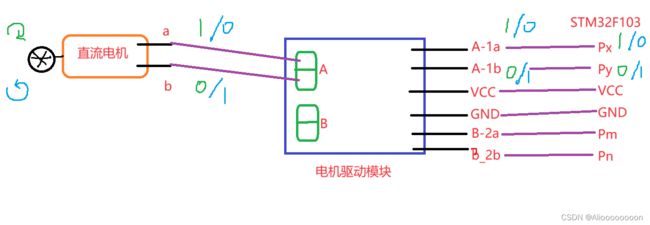
直流电机
直流电机的原理:
通电就会转, 反向通电就会反转
两极的电势差 决定转速
电机驱动模块 以及 接线
参考图示
代码实现:
motor.c / motor.h
#ifndef __MOTOR_H__
#define __MOTOR_H__
void motor_init(void); //函数声明
void set_left_A( int a );
void set_right_B( int b );
void move_front( void );
void move_back(void);
void move_left(void);
void move_right(void);
void stop(void);
#endif
#include "motor.h"
#include "led.h"
#include "stm32f10x.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_rcc.h"
#include "SysTick.h"
void motor_init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
led_init();
//1.使能 GPIO分组 和 AFIO 时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);
//2.禁用Jtag功能, 把PB3, PB4等重新映射为普通IO口
GPIO_PinRemapConfig( GPIO_Remap_SWJ_JTAGDisable , ENABLE );
//3.初始化GPIO --> PB0,PB1,PB6,PB7, 输出推挽
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_6 | GPIO_Pin_7 ;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init( GPIOB, &GPIO_InitStruct );
//设置默认状态 --》 高电平
//GPIO_ResetBits(GPIOB, GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_6 | GPIO_Pin_7);
}
//左轮
void set_left_A( int a )
{
if( a == 0 )//左后退
{
led_ctl(6,0);
led_ctl(7,1);
}
else //左前进
{
led_ctl(6,1);
led_ctl(7,0);
}
}
void set_right_B( int a )
{
if( a == 0 )//右后退
{
led_ctl(0,0);
led_ctl(1,1);
}
else //右前进
{
led_ctl(0,1);
led_ctl(1,0);
}
}
//前进
void move_front( void )
{
set_left_A(1);
set_right_B(1);
}
void move_back(void)
{
set_left_A(0);
set_right_B(0);
}
void move_left(void)
{
//set_left_A(0);
set_right_B(1);
}
void move_right(void)
{
set_left_A(1);
// set_right_B(0);
}
void stop(void)
{
led_ctl(0,0);
led_ctl(1,0);
led_ctl(6,0);
led_ctl(7,0);
}
红外对管
红外发射管
红外接收管
工作原理:
一通电,红外发射管就会不断地往外发射红外光线
红外接收管不断地 接收反射回来的红外光线
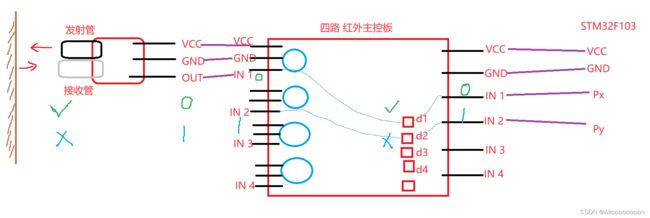
红外主控板 以及 接线
参考图示
灵敏度的调节
旋转灵敏度的调节器 至 指示灯灭,然后 反向旋转 至指示灯 刚刚正常亮的位置
能够让红外对管处于白色地面时,指示灯能够正常点亮
处于黑色轨迹时,指示灯能够熄灭
作用:
(1)循迹
红外对管要垂直于地面进行安装
主要是利用不同颜色的物体对于光线的反射和吸收程度不一样
白色物体:能够反射大量的光线,吸收的比较少
黑色物体:能够吸收大量的光线,反射的比较少
--》
地面(白色):红外接收管能够接收到反射回来的光线
轨迹(黑色):红外接收管就收不到红外光线了
红外循迹
原理:
当红外对管处于白色地面时,红外接收管能够收到反射光线,
此时模块OUT引脚为 低电平0, 红外主控板对应的led灯就会点亮,
连接到32芯片上的对应的GPIO引脚 为低电平0
当红外对管处于黑色轨迹时,红外接收管接收不到反射光线,
此时模块OUT引脚为 高电平1, 红外主控板对应的led灯就会熄灭,
连接到32芯片上的对应的GPIO引脚 为高电平1
利用脉冲宽度调制技术(PWM)控制电机转速
//前进 -- 控速
//举例如下
void move_front_PWM()
{
unsigned char i = 2;
set_left_a( 1 );
set_right_a( 1 );
while( i-- )
{
set_left_b( 0 );
set_right_b( 0 );
delay_ms( 80 ); //前进80ms
set_left_b( 1 );
set_right_b( 1 );
delay_ms( 20 ); //停止20ms(让惯性带动车子转动)
}
}
避障
避障原理:
把红外对管平行于地面进行安装
主要利用空气对于光线有一定削弱作用
当前面有障碍物时,红外接收管能够收到大量的红外光线,红外模块OUT引脚为 低电平0
当前面没有障碍物时,红外接收管接收不到红外光线,红外模块OUT引脚为 高电平1
red.c / red.h
#ifndef __RED_H__
#define __RED_H__
void gpio_redINit(void);
void ourdelay(int time);
void red_init(void);
void red_ctl_led(void);
void red_control(void);
void red_ctl_car(void);
void red_ctl_car_PWM(void);
void red_avoid_car(void);
void red_avoid_car1(void);
#endif
#include "stm32f10x.h"
#include "SysTick.h"
#include "system.h"
#include "wheel.h"
#include "led.h"
#include "beep.h"
#include "red.h"
void ourdelay(int time)
{
int i;
for( i=1;i<=time;i++)
{
delay_ms(1000);
}
}
void gpio_redINit(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_3|GPIO_Pin_4;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU ;
GPIO_Init( GPIOB, &GPIO_InitStruct );
}
void red_init(void)
{
// 1.使能GPIO分组和AFIO时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_AFIO, ENABLE);
// 2.禁用Jtag功能,把PB3, PB4等重新映射为普通IO口
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE);
// 3.初始化GPIO -->带上拉的输入
gpio_redINit();
}
//
void red_ctl_led(void)
{
while(1)
{
uint8_t red1 =GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_3) ;
uint8_t red2 =GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_4) ;
if(red1 ==0) lightledon(6); // sw1开关按下
else lightledoff(0);
if(red2 ==0) lightledon(7);
else lightledoff(1);
}
}
void red_ctl_car(void)
{
SysTick_Init(72);
red_init();
wheel_Init();
beep_control_on();
while(1)
{
uint8_t red1 =GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_3) ;
uint8_t red2 =GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_4) ;
// 左轮白地0,右轮白地0 -->正常前进
if(red1==0 && red2==0)
{
// 前进
move_front();
}
// 左轮检测到黑1,右轮白地0 -->需要左转
if(red1 == 1&& red2 ==0)
{
// 左转
move_left();
}
// 左轮检测到白0,右轮检测到黑1 -->需要右转
if(red1==0&&red2==1)
{
// 右转
move_right();
}
// 左轮检测到黑1,右轮检测到黑1 -->需要停止
if(red1 == 1&& red2 == 1)
{
// 停止
stop();
}
}
}
void red_ctl_car_PWM(void)
{
red_init();
wheel_Init();
while(1)
{
uint8_t red1 =GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_3) ;
uint8_t red2 =GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_4) ;
// 左轮白地0,右轮白地0 -->正常前进
if(red1==0 && red2==0)
{
// 前进
move_front_PWM(80);
}
// 左轮检测到黑1,右轮白地0 -->需要左转
if(red1 == 1&& red2 ==0)
{
// 左转
move_left_PWM(80);
}
// 左轮检测到白0,右轮检测到黑1 -->需要右转
if(red1==0&&red2==1)
{
// 右转
move_right_PWM(80);
}
// 左轮检测到黑1,右轮检测到黑1 -->需要停止
if(red1 == 1&& red2 == 1)
{
// 停止
stop();
}
}
}
// 避障
void red_avoid_car(void)
{
red_init();
wheel_Init();
while(1)
{
uint8_t red1 =GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_3) ;
uint8_t red2 =GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_4) ;
// 左轮1,右轮1 -->无障碍物正常前进
if(red1==1 && red2==1)
{
// 前进
move_front();
}
// 左轮检测到障碍物0,右轮正常1 -->需要右转
if(red1 == 0&& red2 ==1)
{
// 也可以后退一点点 再右转 90°需要延时
stop();
delay_ms(1000);
move_back();
delay_ms(200);
stop();
delay_ms(500);
move_right();
delay_ms(750);
//move_front_PWM(80);
}
// 左轮正常1,右轮检测到障碍物0 -->需要左转
if(red1==1&&red2==0)
{
stop();
delay_ms(1000);
// 先后退
move_back();
// 延时
delay_ms(200);
stop();
delay_ms(500);
move_left();
delay_ms(750);
// move_front_PWM(80);
}
// 前面都有障碍物 0 0 -->需要停止
if(red1 == 0&& red2 == 0)
{
// 停止
stop();
delay_ms(1000);
// 先后退
move_back();
// 延时
delay_ms(600);
move_left();
delay_ms(1000);
delay_ms(500);
//move_front_PWM(80);
}
}
}
// 避障
void red_avoid_car1(void)
{
red_init();
wheel_Init();
while(1)
{
uint8_t red1 =GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_3) ;
uint8_t red2 =GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_4) ;
// 左轮1,右轮1 -->无障碍物正常前进
if(red1==1 && red2==1)
{
// 前进
move_front_PWM(80);
}
// 左轮检测到障碍物0,右轮正常1 -->需要右转
if(red1 == 0&& red2 ==1)
{
// 也可以后退一点点 再右转 90°需要延时
move_right_PWM(80);
}
// 左轮正常1,右轮检测到障碍物0 -->需要左转
if(red1==1&&red2==0)
{
move_left_PWM(80);
}
// 前面都有障碍物 0 0 -->需要停止
if(red1 == 0&& red2 == 0)
{
// 先后退
move_back();
}
}
}
void red_control(void)
{
red_init();
red_ctl_led();
}