IIR数字滤波器实现
题目:16k采样率音频数据下采样到8k采样率
求解方案分析:直接每隔一个取一个采样值,这样就可以得到8k采样率的数据。但是这样明显会有问题。按照采样率变换理论,首先应该通过一个低通滤波器,滤掉[pi/2, pi]这个区间上的频率,以防止下采样造成的频率混叠。这个低通滤波器在很多书上都用FIR滤波去实现,并且可以用FIR滤波的多相结构去实现。这样滤波和下采样过程可以互换位置。即先下采样再进行多相FIR滤波。
在嵌入式设备上FIR滤波会占用较长的时间,为此,我们可以采用IIR滤波器来做。滤波器的设计采用MATLAB的FDATool工具。相关的参数如下:
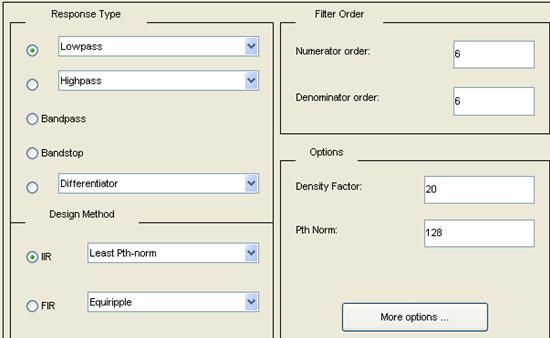
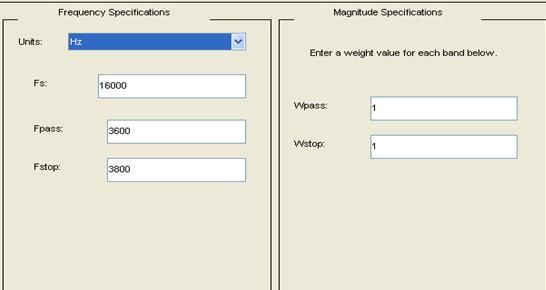
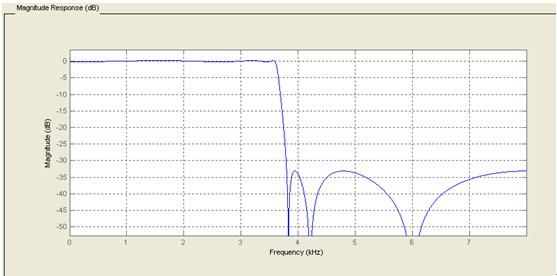
采用最小P阶范数设计IIR滤波器的幅频特性较好。滤波器阶数设定为6阶,需要滤除4k到8k的频率段,才能保证无混叠失真。实际由于滤波器的特性没法做到理想的状态,选择滤波器截止频率为3800hz,3600到3800为过渡带宽。其它选项采用默认设置。设计的滤波器幅度响应如下图:
生成的滤波器系数文件如下:
/*
* Filter Coefficients (C Source) generated by the Filter Design and Analysis Tool
*
* Generated by MATLAB(R) 7.6 and the Signal Processing Toolbox 6.9.
*
* Generated on: 03-Dec-2010 10:41:03
*
*/
/*
* Discrete-Time IIR Filter (real)
* -------------------------------
* Filter Structure : Direct-Form II, Second-Order Sections
* Number of Sections : 3
* Stable : Yes
* Linear Phase : No
*/
/* General type conversion for MATLAB generated C-code */
#include "tmwtypes.h"
/*
* Expected path to tmwtypes.h
* D:/MATLAB/R2008a/extern/include/tmwtypes.h
*/
#define MWSPT_NSEC 7
const int NL[MWSPT_NSEC] = { 1,3,1,3,1,3,1 };
const real64_T NUM[MWSPT_NSEC][3] = {
{
0.09065504059673, 0, 0
},
{
1, -0.1323122149853, 0.9999674089086
},
{
1, 0, 0
},
{
1, 0.1670351201308, 0.9999889247428
},
{
1, 0, 0
},
{
1, 1.417032671609, 0.9978019623105
},
{
1, 0, 0
}
};
const int DL[MWSPT_NSEC] = { 1,3,1,3,1,3,1 };
const real64_T DEN[MWSPT_NSEC][3] = {
{
1, 0, 0
},
{
1, -0.40321085647, 0.7334254033056
},
{
1, 0, 0
},
{
1, -0.6868636040216, 0.2670185171768
},
{
1, 0, 0
},
{
1, -0.2880720042256, 0.9480010462991
},
{
1, 0, 0
}
};
上述系数是3个2阶节IIR结构的级联。可以转换为我们熟悉的b/a的形式如下:
double a[3][3] = {
{1, -0.6868636040216, 0.2670185171768},
{1, -0.40321085647, 0.7334254033056},
{1, -0.2880720042256, 0.9480010462991}
};
double b[3][3] = {
{1, 1.417032671609, 0.9978019623105},
{1, 0.1670351201308, 0.9999889247428},
{1, -0.1323122149853, 0.9999674089086},
};
注意上面系数文件中还有一个增益:
double gain = 0.09065504059673;
这个增益最好在第一级实现以后加入运算。这样可以减小误差,保证数据 动态范围不被溢出。尤其是在定点计算的时候尤为如此。
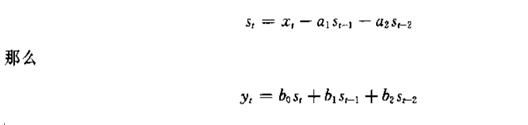
2阶节IIR滤波的直接实现
一个2阶节结构是下面这样一个表达式:

实现上面这个表达式需要4个过去的历史值,把它定义在结构体
typedef struct tag_ IIR_State_2order
{
float y2;
float y1;
float x1;
float x0;
} IIR_State_2order;
调用下面函数之前需要把上述结构体所有值初始化为零。滤波按一帧一帧数据进行。
#define ONE_FRAME_SAMPLE_SIZE 1024
void cy_signal_filter_by_iir(signed short* pcmIn, IIR_State_2order* filter_state, float a[], float b[], signed short* pcmOut)
{
int i;
float x2;
float tmp;
for ( i = 0; i < ONE_FRAME_SAMPLE_SIZE; i++ )
{
x2 = filter_state->x1;
filter_state->x1 = filter_state->x0;
filter_state->x0 = pcmIn[i];
tmp = ( float )(b[0]* filter_state->x0 + b[1]* filter_state->x1 +
b[2] * x2 - a[1] * filter_state->y1 - a[2] * filter_state->y2);
if(tmp >= 32767)
{
tmp = 32767;
}
if(tmp <= -32768)
{
tmp = -32768;
}
pcmOut[i] = (signed short)tmp;
filter_state->y2 = filter_state->y1;
filter_state->y1 = tmp;
}
}
有一个简单的技巧可以把上面的计算简化,使得历史状态数由4减少为2。定义下面的表达式:
结构体定义如下:
typedef struct tag_ IIR_State_2order
{
float st1;
float st2;
} IIR_State_2order;
void cy_signal_filter_by_iir(signed short* pcmIn, IIR_State_2order* filter_state, float a[], float b[], signed short* pcmOut)
{
int i;
float st;
float Tmp_fl;
for ( i = 0; i < ONE_FRAME_SAMPLE_SIZE; i++ )
{
st = (float)(pcmIn[i] - a[1] * filter_state->st1 - a[2] * filter_state-> st2);
Tmp_fl = b[0] * st + b[1] * filter_state->st1 + b[2] * filter_state->st2;
filter_state->st2= filter_state->st1;
filter_state->st1 = st;
if(Tmp_fl >= 32767.0)
{
Tmp_fl = 32767;
}
if(Tmp_fl <= -32768)
{
Tmp_fl = -32768;
}
pcmOut[i] = (signed short)Tmp_fl;
}
}
6阶节IIR滤波的实现
有个上面的基础,我们来实现上面设计的6阶IIR滤波器。
6阶节分解为3个2阶节级联实现。每个2阶节需要2个历史状态,总共需要6个历史状态。结构体定义如下:
typedef struct tag_IIR_State_3Order
{
double w01;
double w02;
double w11;
double w12;
double w21;
double w22;
}IIR_State_6order;
代码中数组a,b,还有gain的定义见第一部分。
void cy_signal_filter_by_6th_iir(signed short* pcmIn, IIR_State_6order* filter_state, int sample_size)
{
double x1, x2, x3, Tmp_f00, Tmp_f10, Tmp_f20;
int i;
double Tmp_pcm;
for (i = 0; i < sample_size; i++)
{
Tmp_pcm = pcmIn[i];
Tmp_f00 = Tmp_pcm - a[0][1] * filter_state->w01 - a[0][2] * filter_state->w02;
x1 = Tmp_f00 + b[0][1] * filter_state->w01 + b[0][2] * filter_state->w02;
filter_state->w02 = filter_state->w01;
filter_state->w01 = Tmp_f00;
x1 = gain * x1;
Tmp_f10 = x1 - a[1][1] * filter_state->w11 - a[1][2] * filter_state->w12;
x2 = Tmp_f10 + b[1][1] * filter_state->w11 + b[1][2] * filter_state->w12;
filter_state->w12 = filter_state->w11;
filter_state->w11 = Tmp_f10;
Tmp_f20 = x2 - a[2][1] * filter_state->w21 - a[2][2] * filter_state->w22;
x3 = Tmp_f20 * b[2][0] + b[2][1] * filter_state->w21 + b[2][2] * filter_state->w22;
filter_state->w22 = filter_state->w21;
filter_state->w21 = Tmp_f20;
if (x3 >= 32767)
{
x3 = 32767;
}
if (x3 <= -32768)
{
x3 = -32768;
}
pcmIn[i] = (signed short)x3;
}
}
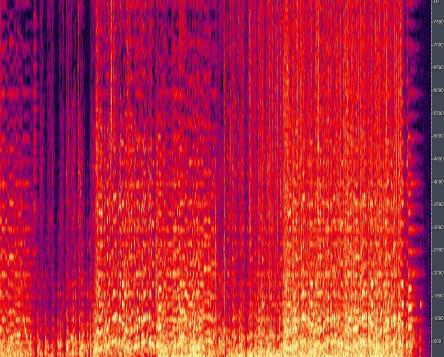
最后看下滤波的效果:
滤波之后的频谱:
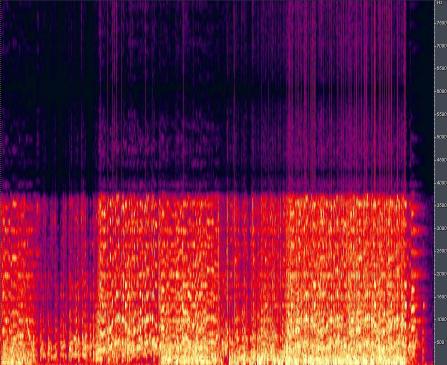
滤波效果不错,下面可以进行下采样了。