射线和三角形的相交检测(ray triangle intersection test)
本文以Fast, Minimum Storage Ray Triangle Intersection为参考,在此感谢原作者,大家也可以直接阅读原版。
概述
射线和三角形的相交检测是游戏程序设计中一个常见的问题,最典型的应用就是拾取(Picking),本文介绍一个最常见的方法,这个方法也是DirectX中采用的方法,该方法速度快,而且存储空间少。先讲述理论,然后给出对应的代码实现。


理论部分
一个直观的方法
我想大多数人在看到这个问题时,可能都会想到一个简单而直观的方法:首先判断射线是否与三角形所在的平面相交,如果相交,再判断交点是否在三角形内。
但是,上面的方法效率并不很高,因为需要一个额外的计算,那就是计算出三角形所在的平面,而下面要介绍的方法则可以省去这个计算。
本文的方法
接下来会涉及到一些数学知识,不过没关系,我会详细解释每一个步骤,不至于太晦涩,只要您不觉得烦就行了,好了开始!
射线的参数方程如下,其中O是射线的起点,D是射线的方向。
![]()
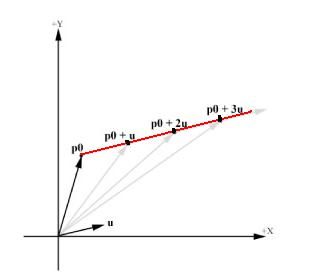
我们可以这样理解射线,一个点从起点O开始,沿着方向D移动任意长度,得到终点R,根据t值的不同,得到的R值也不同,所有这些不同的R值便构成了整条射线,比如下面的射线,起点是P0,方向是u,p0 + tu也就构成了整条射线。
三角形的参数方程如下,其中V0,V1和V2是三角形的三个点,u, v是V1和V2的权重,1-u-v是V0的权重,并且满足u>=0, v >= 0,u+v<=1。
![]()
确切的说,上面的方程是三角形及其内部所有点的方程,因为三角形内任意一点都可以理解为从顶点V0开始,沿着边V0V1移动一段距离,然后再沿着边V0V2移动一段距离,然后求他们的和向量。至于移动多大距离,就是由参数u和v控制的。

于是,求射线与三角形的交点也就变成了解下面这个方程-其中t,u,v是未知数,其他都是已知的
![]()
移项并整理,将t,u,v提取出来作为未知数,得到下面的线性方程组

现在开始解这个方程组,这里要用到两个知识点,一是克莱姆法则,二是向量的混合积。
令E1 = V1 - V0,E2 = V2 - V0,T = O - V0上式可以改写成

根据克莱姆法则,可得到t,u,v的解分别是

将这三个解联合起来写就是

根据混合积公式
![]()
上式可以改写成

令

得到最终的公式,这便是下面代码中用到的最终公式了,之所以提炼出P和Q是为了避免重复计算

代码部分
理论部分阐述完毕,开始上代码,这份代码来自DirectX SDK中的Demo,名字叫做Picking(拾取),该函数位于文件Pick.cpp的最末尾。这个函数有一个特点,就是判断语句特别多,因为对于一个频繁被调用的函数来说,效率是最重要的,这么多判断就是为了在某个条件不满足时,及时返回,避免后续不必要的计算。
1 // Determine whether a ray intersect with a triangle 2 // Parameters 3 // orig: origin of the ray 4 // dir: direction of the ray 5 // v0, v1, v2: vertices of triangle 6 // t(out): weight of the intersection for the ray 7 // u(out), v(out): barycentric coordinate of intersection 8 9 bool IntersectTriangle(const Vector3& orig, const Vector3& dir, 10 Vector3& v0, Vector3& v1, Vector3& v2, 11 float* t, float* u, float* v) 12 { 13 // E1 14 Vector3 E1 = v1 - v0; 15 16 // E2 17 Vector3 E2 = v2 - v0; 18 19 // P 20 Vector3 P = dir.Cross(E2); 21 22 // determinant 23 float det = E1.Dot(P); 24 25 // keep det > 0, modify T accordingly 26 Vector3 T; 27 if( det >0 ) 28 { 29 T = orig - v0; 30 } 31 else 32 { 33 T = v0 - orig; 34 det = -det; 35 } 36 37 // If determinant is near zero, ray lies in plane of triangle 38 if( det < 0.0001f ) 39 return false; 40 41 // Calculate u and make sure u <= 1 42 *u = T.Dot(P); 43 if( *u < 0.0f || *u > det ) 44 return false; 45 46 // Q 47 Vector3 Q = T.Cross(E1); 48 49 // Calculate v and make sure u + v <= 1 50 *v = dir.Dot(Q); 51 if( *v < 0.0f || *u + *v > det ) 52 return false; 53 54 // Calculate t, scale parameters, ray intersects triangle 55 *t = E2.Dot(Q); 56 57 float fInvDet = 1.0f / det; 58 *t *= fInvDet; 59 *u *= fInvDet; 60 *v *= fInvDet; 61 62 return true; 63 }
参数说明
输入参数:前两个参数orig和dir是射线的起点和方向,中间三个参数v0,v1和v2是三角形的三个顶点。
输出参数:t是交点对应的射线方程中的t值,u,v则是交点的纹理坐标值
代码说明
变量的命名方式:为了方便阅读,代码中的变量命名与上面公式中的变量保持一致,如E1,E2,T等。
变量det表示矩阵的行列式值
27-35行用来确保det>0,如果det<0则令det = -det,并对T做相应的调整,这样做是为了方便后续计算,否则的话需要分别处理det>0和det<0两种情况。
第38行,注意浮点数和0的比较,一般不用 == 0的方式,而是给定一个Epsilon值,并与这个值比较。
第43行,这里实际上u还没有计算完毕,此时的值是Dot(P,T),如果Dot(P,T) > det, 那么u > 1,无交点。
第51行,要确保u + v <= 1,也即 [Dot(P,T) + Dot(Q, D)] / det 必须不能大于1,否则无交点。
第57-60行,走到这里时,表明前面的条件都已经满足,开始计算t, u, v的最终值。
交点坐标
根据上面代码求出的t,u,v的值,交点的最终坐标可以用下面两种方法计算
O + Dt
(1 - u - v)V0 + uV1 + vV2
后记
在本文开头已经说了,射线和三角形的相交检测最典型的应用就是拾取,比如在一个三维场景中用鼠标选择某个物体。那么拾取是如何实现的呢?我们知道在物体的三维模型表示中,三角形是最小的几何图元,最小意味着不可再分,也就是说任何模型,无论它多么复杂,都可以由若干个三角形组合而成。拾取过程实际是判断拾取射线是否与模型相交,而这又可以转化为-只要射线与模型中的任何一个三角形相交即可。下面是模型的线框表示法,可见如果想要判断某条射线是否与这个茶壶相交,只要判断该射线是否与茶壶模型中某个三角形相交即可。

需要注意的是,虽然射线和三角形的相交检测可以用来实现拾取,但是大多数程序并不采用这个方法,原因是这个方法效率很低,我们可以设想,一个大型的3D在线游戏,它的模型数量以及复杂程度都是很高的,如果用这种方法来判断,需要对模型中每个三角形都做一次判断,效率极其低下,一种可行的方案是,用包围球或者包围盒来代替,计算出能容纳模型的最小球体或者矩形体,只要判断出射线与包围球或者包围盒相交,我们就认为射线与模型相交,这样效率会显著提高,只是精确度上会有一定误差,但是足以满足多数程序的需要。

Happy Coding
== The End ==