实现温控的初步想法 :二
既然已经确定了只用一个时钟就可以实现很多功能,那么接下来就涉及到问题了,可不可以在每隔10ms的一个时钟中断内实现ADC12的转换并且将ADC12转换后的值取出并赋给变量呢?
这个问题很重要,因为以前做ADC的转换的时候,需要将转换结果赋值时,还需要使用ADC的一个内部的中断。那么这个问题难道还要涉及到中断的嵌套之类的问题吗?
先看了下msp430f5438A上的关于中断优先级的讲述:
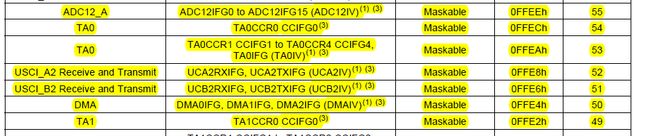
所以说ADC12_A的优先级是高于TA1,所以使用中断优先级的方法先完成10ms的定时中断,然后再完成ADC12_A的取样赋值貌似并不是很靠谱。(其实我并不是很清楚中断优先级这些玩意)
那么有没有可能在Timer_A的中断内部再使能一个ADC12_A的中断呢?
话不多说,开始实验:
额。。。上午10点要开始实验的,结果一直到了晚上8点了都没搞出啥来,主要是感觉有点麻烦,毛毛躁躁的,导致效率太低了。现在再扎实一点重新验证想法:
一:代码如下
volatile unsigned int result; // Needs to be global in this example,Otherwise, the compiler removes it
// because it is not used for anything.
void InitADC12_A()
{
ADC12CTL0 = ADC12ON+ADC12MSC+ADC12SHT0_15; // Turn on ADC12, set sampling time
ADC12CTL1 = ADC12SHP+ADC12CONSEQ_2; // Use sampling timer, repeat single channel (我觉得这一个设定可能会比较关键)
ADC12MCTL0 = ADC12SREF_2 + ADC12INCH_3; // ref+=Veref=2.5V, channel = A3
ADC12IE = ADC12IE0; // Enable ADC12IFG.0
ADC12CTL0 |= ADC12ENC; // Enable conversions
}
#pragma vector=ADC12_VECTOR
__interrupt void ADC12ISR (void)
{
switch(__even_in_range(ADC12IV,34))
{
case 0: break; // Vector 0: No interrupt
case 2: break; // Vector 2: ADC overflow
case 4: break; // Vector 4: ADC timing overflow
case 6: // Vector 6: ADC12IFG0
result = ADC12MEM0; // Move results, IFG is cleared
P11OUT ^= BIT0; //light red LED
__bic_SR_register_on_exit(LPM4_bits);
case 8: break; // Vector 8: ADC12IFG1
case 10: break; // Vector 10: ADC12IFG2
case 12: break; // Vector 12: ADC12IFG3
case 14: break; // Vector 14: ADC12IFG4
case 16: break; // Vector 16: ADC12IFG5
case 18: break; // Vector 18: ADC12IFG6
case 20: break; // Vector 20: ADC12IFG7
case 22: break; // Vector 22: ADC12IFG8
case 24: break; // Vector 24: ADC12IFG9
case 26: break; // Vector 26: ADC12IFG10
case 28: break; // Vector 28: ADC12IFG11
case 30: break; // Vector 30: ADC12IFG12
case 32: break; // Vector 32: ADC12IFG13
case 34: break; // Vector 34: ADC12IFG14
default: break;
}
}
void main(void)
{
InitADC12_A();
WDTCTL = WDTPW+WDTHOLD; // Stop watchdog timer
ADC12CTL0 |= ADC12SC; // Start convn - software trigger
P11DIR |= BIT0; //设置P11.0为输出
P11OUT &= ~BIT0; //点亮LED灯 设置这两行的目的其实有观察ADC12MEM0寄存器的作用。
__bis_SR_register(LPM4_bits + GIE); // Enter LPM4, Enable interrupts
__no_operation(); // For debugger
}
然后debug.
然后可以发现,当程序运行到ADC12CTL0 |= ADC12SC; // Start convn - software trigger时:
ADC12MEM0寄存器的值是0x0897
当运行到P11DIR |= BIT0; //设置P11.0为输出时:
ADC12MEM0寄存器的值为 0x08C6
当运行到P11OUT &= ~BIT0时,ADC12MEM0寄存器的值为 0x08C7 ,ADC12IFG0 = 1;
当运行到__bis_SR_register(LPM4_bits + GIE);时,ADC12MEM0寄存器的值为 0x08BD。ADC12IFG0 = 1;
当运行到 result = ADC12MEM0时,ADC12MEM0寄存器的值为 0x08D9,result的值为2239 。ADC12IFG0 = 1;
当运行到__bic_SR_register_on_exit(LPM4_bits);ADC12MEM0寄存器的值为 0x08C3 , result的值为2239,ADC12IFG0 = 1。
当一直运行时我们发现,这个程序就一直没有从中断中出来过。
从这些运行结果我们可以看出,ADC12MEM0寄存器的值一直都在改变,而自从转换后ADC12IFG0=1就一直没变过。这也就导致了程序一直被困在中断中不能返回主函数。
既然这样,那么在Timer_A中进入ADC12后,由于ADC12IFG0=1,所以就再也回不到Timer_A产生的中断了。这是由ADC12CONSEQx决定的。
二:猜想将ADC12CONSEQx设为0时,那么会有:
ADC12CTL1 = ADC12SHP+ADC12CONSEQ_2; // Use sampling timer, repeat single channel (我觉得这一个设定可能会比较关键)
改为:ADC12CTL1 = ADC12SHP+ADC12CONSEQ_0; // Use sampling timer, single single channel (我觉得这一个设定可能会比较关键)
那么debug结果为:
当程序运行到ADC12CTL0 |= ADC12SC; // Start convn - software trigger时:
ADC12MEM0寄存器的值是0x08C1,ADC12IFG0 = 1;
当运行到P11DIR |= BIT0; //设置P11.0为输出时:
ADC12MEM0寄存器的值为 0x08C6,ADC12IFG0 = 1;
当运行到P11OUT &= ~BIT0时,ADC12MEM0寄存器的值为 0x08C1 ,ADC12IFG0 = 1;
当运行到__bis_SR_register(LPM4_bits + GIE);时,ADC12MEM0寄存器的值为 0x08C1。ADC12IFG0 = 1;
当运行到 result = ADC12MEM0时,ADC12MEM0寄存器的值为 0x08D9,result的值为2241 。ADC12IFG0 = 0;
当运行到__bic_SR_register_on_exit(LPM4_bits);ADC12MEM0寄存器的值为 0x08C1 , result的值为2241,ADC12IFG0 = 0。
再debug,会发现程序回到了主函数,然后结束运行。
三:回到原来的那个问题,我应该怎么样才能实现温控呢?
尝试着写以下代码:
#include "io430.h"
//这个函数用来产生5MHz的时钟信号
void InitClock()
{
P1DIR |= BIT0;
P1SEL |= BIT0; //ACLK output,这时候可以使用示波器观察时钟信号
UCSCTL3 |= SELREF_2; // FLLref = REFO
UCSCTL4 = SELM__DCOCLKDIV + SELS__DCOCLKDIV + SELA__DCOCLKDIV;// 时钟来源:主系统时钟来源DCOCLKDIV;子系统时钟来源DCOCLKDIV;辅助系统时钟来源DCOCLKDIV
UCSCTL5 |= DIVM__1 + DIVS__4 + DIVA__1; // 分频:主系统时钟1分频;子系统时钟16分频;辅助系统时钟1分频
__bis_SR_register(SCG0); // Disable FLL
UCSCTL1 = DCORSEL_6; // 10.7MHz<Fdco<39MHz
UCSCTL2 |= FLLD__2 +151 ; // 约5MHz DCOCLKDIV Fdco/4
__bic_SR_register(SCG0); // Enable FLL
// 等待错误标志清除,振动器稳定
do
{
UCSCTL7 &= ~(XT2OFFG + XT1LFOFFG + XT1HFOFFG + DCOFFG); // Clear XT2,XT1,DCO fault flags
SFRIFG1 &= ~OFIFG; // Clear fault flags
}while (SFRIFG1&OFIFG); // Test oscillator fault flag
}
//初始化Timer_A
void Init_Timer_A()
{
P7DIR |= 0x08; // P7.3 output
P7SEL |= 0x08; // P7.3 options select
P11DIR |= 0x01; // P11.0 output red_LED
P11OUT &= ~BIT0; //输出低电平 LED灯亮
TA1CCTL0 = CCIE; // CCR0 interrupt enabled
TA1CCR0 = 39062; //设置周期为250ms
TA1CCTL2 = OUTMOD_3; // CCR2 set/reset
TA1CCR2 = 40000; // CCR2 original PWM duty cycle 1/5
TA1CTL = TASSEL_2 + MC_1 + TACLR; // SMCLK, upmode, clear TAR
}
// 初始化ADC12
void InitADC12()
{
P6SEL = 0x08; // Enable P6.3 as A/D channel input
ADC12CTL0 = ADC12ON+ADC12MSC+ADC12SHT0_2; // Turn on ADC12, set sampling time, 16ADC12CLK cycles
ADC12CTL1 = ADC12SHP+ADC12CONSEQ_0+ADC12SSEL_2; // Use sampling timer, single time single channel,MCLK=5M
ADC12MCTL0 = ADC12SREF_2+ADC12INCH_3; // ref+ = VeREF+, ref- = AVSS, channel = A4
ADC12IE = 0x01; // Enable ADC12IFG.0
ADC12CTL0 |= ADC12ENC; // Enable conversions
}
volatile unsigned result ;
void main(void)
{
WDTCTL = WDTPW + WDTHOLD; // Stop WDT
InitClock();
Init_Timer_A();
P11OUT ^= 0x01; // Toggle触发 P11.0
while(1)
{
__bis_SR_register(LPM0_bits + GIE);
__no_operation();
}
}
#pragma vector=TIMER1_A0_VECTOR
__interrupt void TIMER1_A0_ISR(void)
{
P11OUT ^= 0x01; // Toggle触发 P11.0
InitADC12();
ADC12CTL0 |= ADC12SC;
__bis_SR_register(LPM0_bits + GIE);
__no_operation();
}
#pragma vector=ADC12_VECTOR
__interrupt void ADC12ISR (void)
{
switch(__even_in_range(ADC12IV,34))
{
case 0: break; // Vector 0: No interrupt
case 2: break; // Vector 2: ADC overflow
case 4: break; // Vector 4: ADC timing overflow
case 6: // Vector 6: ADC12IFG0
result = ADC12MEM0; // Move result, IFG置0
__bic_SR_register_on_exit(LPM0_bits); // Exit active CPU, SET BREAKPOINT HERE
case 8: break; // Vector 8: ADC12IFG1
case 10: break; // Vector 10: ADC12IFG2
case 12: break; // Vector 12: ADC12IFG3
case 14: break; // Vector 14: ADC12IFG4
case 16: break; // Vector 16: ADC12IFG5
case 18: break; // Vector 18: ADC12IFG6
case 20: break; // Vector 20: ADC12IFG7
case 22: break; // Vector 22: ADC12IFG8
case 24: break; // Vector 24: ADC12IFG9
case 26: break; // Vector 26: ADC12IFG10
case 28: break; // Vector 28: ADC12IFG11
case 30: break; // Vector 30: ADC12IFG12
case 32: break; // Vector 32: ADC12IFG13
case 34: break; // Vector 34: ADC12IFG14
default: break;
}
}
这个代码很好理解,先是程序进入Timer_A1的中断,然后初始化ADC12,再实现模数转换,进入ADC12的中断,将ADC采集到的数据传到result,然后再进入Timer_A1的中断。
调试过程没有问题,得到了定时采集ADC值的效果。
同时观察到红色LED灯闪烁,说明确实是隔了一段定时的时间进入中断。
到此为止,温控的程序逻辑算是调试结束了。
结束语:在学习这种新东西时,一定不要着急,宁慢勿慌。就算一天就搞懂一个知识点,也比焦虑慌乱结果一事无成要好。