SIFT特征提取-应用篇
SIFT特征具有缩放、旋转特征不变性,下载了大牛的matlab版SIFT特征提取代码,解释如下:
1.调用方法:
将文件加入matlab目录后,在主程序中有两种操作:
op1:寻找图像中的Sift特征:
[image, descrips, locs] = sift('scene.pgm');
showkeys(image, locs);
op2:对两幅图中的SIFT特征进行匹配:
match('scene.pgm','book.pgm');
由于scene和book两图中有相同的一本书,但orientation和size都不同,可以发现所得结果中Sift特征检测结果非常好。
2.代码下载地址:
http://www.cs.ubc.ca/~lowe/keypoints/
3.想用自己的图片进行调用:
i1=imread('D:\Images\New\Cars\image_0001.jpg');
i2=imread('D:\Images\New\Cars\image_0076.jpg');
i11=rgb2gray(i1);
i22=rgb2gray(i2);
imwrite(i11,'v1.jpg','quality',80);
imwrite(i22,'v2.jpg','quality',80);
match('v1.jpg','v2.jpg');experiment results:
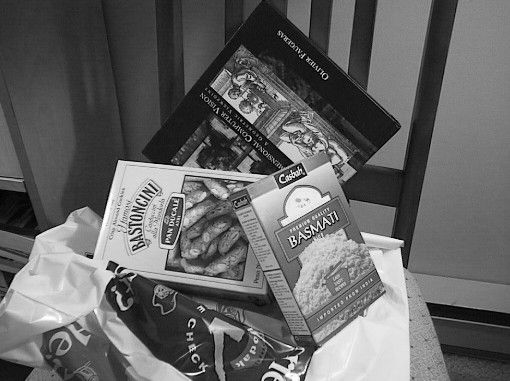
scene
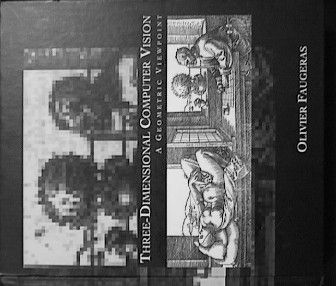
book
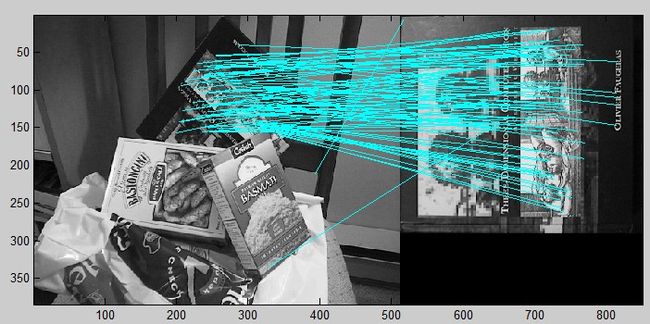
compare result
EXP2:

C代码:
// FeatureDetector.cpp : Defines the entry point for the console application.
//
#include "stdafx.h"
#include "highgui.h"
#include "cv.h"
#include "vector"
#include "opencv\cxcore.hpp"
#include "iostream"
#include "opencv.hpp"
#include "nonfree.hpp"
#include "showhelper.h"
using namespace cv;
using namespace std;
int _tmain(int argc, _TCHAR* argv[])
{
//Load Image
Mat c_src1 = imread( "..\\Images\\3.jpg");
Mat c_src2 = imread("..\\Images\\4.jpg");
Mat src1 = imread( "..\\Images\\3.jpg", CV_LOAD_IMAGE_GRAYSCALE);
Mat src2 = imread( "..\\Images\\4.jpg", CV_LOAD_IMAGE_GRAYSCALE);
if( !src1.data || !src2.data )
{ std::cout<< " --(!) Error reading images " << std::endl; return -1; }
//sift feature detect
SiftFeatureDetector detector;
std::vector<KeyPoint> kp1, kp2;
detector.detect( src1, kp1 );
detector.detect( src2, kp2 );
SiftDescriptorExtractor extractor;
Mat des1,des2;//descriptor
extractor.compute(src1,kp1,des1);
extractor.compute(src2,kp2,des2);
Mat res1,res2;
int drawmode = DrawMatchesFlags::DRAW_RICH_KEYPOINTS;
drawKeypoints(c_src1,kp1,res1,Scalar::all(-1),drawmode);//在内存中画出特征点
drawKeypoints(c_src2,kp2,res2,Scalar::all(-1),drawmode);
cout<<"size of description of Img1: "<<kp1.size()<<endl;
cout<<"size of description of Img2: "<<kp2.size()<<endl;
BFMatcher matcher(NORM_L2);
vector<DMatch> matches;
matcher.match(des1,des2,matches);
Mat img_match;
drawMatches(src1,kp1,src2,kp2,matches,img_match);//,Scalar::all(-1),Scalar::all(-1),vector<char>(),drawmode);
cout<<"number of matched points: "<<matches.size()<<endl;
imshow("matches",img_match);
cvWaitKey();
cvDestroyAllWindows();
return 0;
}
Python代码:
http://blog.csdn.net/abcjennifer/article/details/7639681
关于sift的其他讲解:
http://blog.csdn.net/abcjennifer/article/details/7639681
http://blog.csdn.net/abcjennifer/article/details/7372880
http://blog.csdn.net/abcjennifer/article/details/7365882
关于computer vision的更多讨论与交流,敬请关注本博客和新浪微博Sophia_qing。