x264源代码简单分析:编码器主干部分-1
=====================================================
H.264源代码分析文章列表:
【编码 - x264】
x264源代码简单分析:概述
x264源代码简单分析:x264命令行工具(x264.exe)
x264源代码简单分析:编码器主干部分-1
x264源代码简单分析:编码器主干部分-2
x264源代码简单分析:x264_slice_write()
x264源代码简单分析:滤波(Filter)部分
x264源代码简单分析:宏块分析(Analysis)部分-帧内宏块(Intra)
x264源代码简单分析:宏块分析(Analysis)部分-帧间宏块(Inter)
x264源代码简单分析:宏块编码(Encode)部分
x264源代码简单分析:熵编码(Entropy Encoding)部分
FFmpeg与libx264接口源代码简单分析
【解码 - libavcodec H.264 解码器】
FFmpeg的H.264解码器源代码简单分析:概述
FFmpeg的H.264解码器源代码简单分析:解析器(Parser)部分
FFmpeg的H.264解码器源代码简单分析:解码器主干部分
FFmpeg的H.264解码器源代码简单分析:熵解码(EntropyDecoding)部分
FFmpeg的H.264解码器源代码简单分析:宏块解码(Decode)部分-帧内宏块(Intra)
FFmpeg的H.264解码器源代码简单分析:宏块解码(Decode)部分-帧间宏块(Inter)
FFmpeg的H.264解码器源代码简单分析:环路滤波(Loop Filter)部分
=====================================================
本文分析x264编码器主干部分的源代码。“主干部分”指的就是libx264中最核心的接口函数——x264_encoder_encode(),以及相关的几个接口函数x264_encoder_open(),x264_encoder_headers(),和x264_encoder_close()。这一部分源代码比较复杂,现在看了半天依然感觉很多地方不太清晰,暂且把已经理解的地方整理出来,以后再慢慢补充还不太清晰的地方。由于主干部分内容比较多,因此打算分成两篇文章来记录:第一篇文章记录x264_encoder_open(),x264_encoder_headers(),和x264_encoder_close()这三个函数,第二篇文章记录x264_encoder_encode()函数。
函数调用关系图
X264编码器主干部分的源代码在整个x264中的位置如下图所示。
X264编码器主干部分的函数调用关系如下图所示。

从图中可以看出,x264主干部分最复杂的函数就是x264_encoder_encode(),该函数完成了编码一帧YUV为H.264码流的工作。与之配合的还有打开编码器的函数x264_encoder_open(),关闭编码器的函数x264_encoder_close(),以及输出SPS/PPS/SEI这样的头信息的x264_encoder_headers()。
x264_encoder_open()用于打开编码器,其中初始化了libx264编码所需要的各种变量。它调用了下面的函数:x264_validate_parameters():检查输入参数(例如输入图像的宽高是否为正数)。x264_predict_16x16_init():初始化Intra16x16帧内预测汇编函数。x264_predict_4x4_init():初始化Intra4x4帧内预测汇编函数。x264_pixel_init():初始化像素值计算相关的汇编函数(包括SAD、SATD、SSD等)。x264_dct_init():初始化DCT变换和DCT反变换相关的汇编函数。x264_mc_init():初始化运动补偿相关的汇编函数。x264_quant_init():初始化量化和反量化相关的汇编函数。x264_deblock_init():初始化去块效应滤波器相关的汇编函数。x264_lookahead_init():初始化Lookahead相关的变量。x264_ratecontrol_new():初始化码率控制相关的变量。
x264_encoder_headers()输出SPS/PPS/SEI这些H.264码流的头信息。它调用了下面的函数:x264_sps_write():输出SPSx264_pps_write():输出PPSx264_sei_version_write():输出SEI
x264_encoder_encode()编码一帧YUV为H.264码流。它调用了下面的函数:
x264_frame_pop_unused():获取1个x264_frame_t类型结构体fenc。如果frames.unused[]队列不为空,就调用x264_frame_pop()从unused[]队列取1个现成的;否则就调用x264_frame_new()创建一个新的。x264_frame_copy_picture():将输入的图像数据拷贝至fenc。x264_lookahead_put_frame():将fenc放入lookahead.next.list[]队列,等待确定帧类型。x264_lookahead_get_frames():通过lookahead分析帧类型。该函数调用了x264_slicetype_decide(),x264_slicetype_analyse()和x264_slicetype_frame_cost()等函数。经过一些列分析之后,最终确定了帧类型信息,并且将帧放入frames.current[]队列。x264_frame_shift():从frames.current[]队列取出1帧用于编码。x264_reference_update():更新参考帧列表。x264_reference_reset():如果为IDR帧,调用该函数清空参考帧列表。x264_reference_hierarchy_reset():如果是I(非IDR帧)、P帧、B帧(可做为参考帧),调用该函数。x264_reference_build_list():创建参考帧列表list0和list1。x264_ratecontrol_start():开启码率控制。x264_slice_init():创建 Slice Header。x264_slices_write():编码数据(最关键的步骤)。其中调用了x264_slice_write()完成了编码的工作(注意“x264_slices_write()”和“x264_slice_write()”名字差了一个“s”)。x264_encoder_frame_end():编码结束后做一些后续处理,例如记录一些统计信息。其中调用了x264_frame_push_unused()将fenc重新放回frames.unused[]队列,并且调用x264_ratecontrol_end()关闭码率控制。
x264_encoder_close()用于关闭解码器,同时输出一些统计信息。它调用了下面的函数:
x264_lookahead_delete():释放Lookahead相关的变量。x264_ratecontrol_summary():汇总码率控制信息。x264_ratecontrol_delete():关闭码率控制。
本文将会记录x264_encoder_open(),x264_encoder_headers(),和x264_encoder_close()这三个函数的源代码。下一篇文章记录x264_encoder_encode()函数。
x264_encoder_open()
x264_encoder_open()是一个libx264的API。该函数用于打开编码器,其中初始化了libx264编码所需要的各种变量。该函数的声明如下所示。
/* x264_encoder_open: * create a new encoder handler, all parameters from x264_param_t are copied */ x264_t *x264_encoder_open( x264_param_t * );x264_encoder_open()的定义位于encoder\encoder.c,如下所示。
/****************************************************************************
* x264_encoder_open:
* 注释和处理:雷霄骅
* http://blog.csdn.net/leixiaohua1020
* leixiaohua1020@126.com
****************************************************************************/
//打开编码器
x264_t *x264_encoder_open( x264_param_t *param )
{
x264_t *h;
char buf[1000], *p;
int qp, i_slicetype_length;
CHECKED_MALLOCZERO( h, sizeof(x264_t) );
/* Create a copy of param */
//将参数拷贝进来
memcpy( &h->param, param, sizeof(x264_param_t) );
if( param->param_free )
param->param_free( param );
if( x264_threading_init() )
{
x264_log( h, X264_LOG_ERROR, "unable to initialize threading\n" );
goto fail;
}
//检查输入参数
if( x264_validate_parameters( h, 1 ) < 0 )
goto fail;
if( h->param.psz_cqm_file )
if( x264_cqm_parse_file( h, h->param.psz_cqm_file ) < 0 )
goto fail;
if( h->param.rc.psz_stat_out )
h->param.rc.psz_stat_out = strdup( h->param.rc.psz_stat_out );
if( h->param.rc.psz_stat_in )
h->param.rc.psz_stat_in = strdup( h->param.rc.psz_stat_in );
x264_reduce_fraction( &h->param.i_fps_num, &h->param.i_fps_den );
x264_reduce_fraction( &h->param.i_timebase_num, &h->param.i_timebase_den );
/* Init x264_t */
h->i_frame = -1;
h->i_frame_num = 0;
if( h->param.i_avcintra_class )
h->i_idr_pic_id = 5;
else
h->i_idr_pic_id = 0;
if( (uint64_t)h->param.i_timebase_den * 2 > UINT32_MAX )
{
x264_log( h, X264_LOG_ERROR, "Effective timebase denominator %u exceeds H.264 maximum\n", h->param.i_timebase_den );
goto fail;
}
x264_set_aspect_ratio( h, &h->param, 1 );
//初始化SPS和PPS
x264_sps_init( h->sps, h->param.i_sps_id, &h->param );
x264_pps_init( h->pps, h->param.i_sps_id, &h->param, h->sps );
//检查级Level-通过宏块个数等等
x264_validate_levels( h, 1 );
h->chroma_qp_table = i_chroma_qp_table + 12 + h->pps->i_chroma_qp_index_offset;
if( x264_cqm_init( h ) < 0 )
goto fail;
//各种赋值
h->mb.i_mb_width = h->sps->i_mb_width;
h->mb.i_mb_height = h->sps->i_mb_height;
h->mb.i_mb_count = h->mb.i_mb_width * h->mb.i_mb_height;
h->mb.chroma_h_shift = CHROMA_FORMAT == CHROMA_420 || CHROMA_FORMAT == CHROMA_422;
h->mb.chroma_v_shift = CHROMA_FORMAT == CHROMA_420;
/* Adaptive MBAFF and subme 0 are not supported as we require halving motion
* vectors during prediction, resulting in hpel mvs.
* The chosen solution is to make MBAFF non-adaptive in this case. */
h->mb.b_adaptive_mbaff = PARAM_INTERLACED && h->param.analyse.i_subpel_refine;
/* Init frames. */
if( h->param.i_bframe_adaptive == X264_B_ADAPT_TRELLIS && !h->param.rc.b_stat_read )
h->frames.i_delay = X264_MAX(h->param.i_bframe,3)*4;
else
h->frames.i_delay = h->param.i_bframe;
if( h->param.rc.b_mb_tree || h->param.rc.i_vbv_buffer_size )
h->frames.i_delay = X264_MAX( h->frames.i_delay, h->param.rc.i_lookahead );
i_slicetype_length = h->frames.i_delay;
h->frames.i_delay += h->i_thread_frames - 1;
h->frames.i_delay += h->param.i_sync_lookahead;
h->frames.i_delay += h->param.b_vfr_input;
h->frames.i_bframe_delay = h->param.i_bframe ? (h->param.i_bframe_pyramid ? 2 : 1) : 0;
h->frames.i_max_ref0 = h->param.i_frame_reference;
h->frames.i_max_ref1 = X264_MIN( h->sps->vui.i_num_reorder_frames, h->param.i_frame_reference );
h->frames.i_max_dpb = h->sps->vui.i_max_dec_frame_buffering;
h->frames.b_have_lowres = !h->param.rc.b_stat_read
&& ( h->param.rc.i_rc_method == X264_RC_ABR
|| h->param.rc.i_rc_method == X264_RC_CRF
|| h->param.i_bframe_adaptive
|| h->param.i_scenecut_threshold
|| h->param.rc.b_mb_tree
|| h->param.analyse.i_weighted_pred );
h->frames.b_have_lowres |= h->param.rc.b_stat_read && h->param.rc.i_vbv_buffer_size > 0;
h->frames.b_have_sub8x8_esa = !!(h->param.analyse.inter & X264_ANALYSE_PSUB8x8);
h->frames.i_last_idr =
h->frames.i_last_keyframe = - h->param.i_keyint_max;
h->frames.i_input = 0;
h->frames.i_largest_pts = h->frames.i_second_largest_pts = -1;
h->frames.i_poc_last_open_gop = -1;
//CHECKED_MALLOCZERO(var, size)
//调用malloc()分配内存,然后调用memset()置零
CHECKED_MALLOCZERO( h->frames.unused[0], (h->frames.i_delay + 3) * sizeof(x264_frame_t *) );
/* Allocate room for max refs plus a few extra just in case. */
CHECKED_MALLOCZERO( h->frames.unused[1], (h->i_thread_frames + X264_REF_MAX + 4) * sizeof(x264_frame_t *) );
CHECKED_MALLOCZERO( h->frames.current, (h->param.i_sync_lookahead + h->param.i_bframe
+ h->i_thread_frames + 3) * sizeof(x264_frame_t *) );
if( h->param.analyse.i_weighted_pred > 0 )
CHECKED_MALLOCZERO( h->frames.blank_unused, h->i_thread_frames * 4 * sizeof(x264_frame_t *) );
h->i_ref[0] = h->i_ref[1] = 0;
h->i_cpb_delay = h->i_coded_fields = h->i_disp_fields = 0;
h->i_prev_duration = ((uint64_t)h->param.i_fps_den * h->sps->vui.i_time_scale) / ((uint64_t)h->param.i_fps_num * h->sps->vui.i_num_units_in_tick);
h->i_disp_fields_last_frame = -1;
//RDO初始化
x264_rdo_init();
/* init CPU functions */
//初始化包含汇编优化的函数
//帧内预测
x264_predict_16x16_init( h->param.cpu, h->predict_16x16 );
x264_predict_8x8c_init( h->param.cpu, h->predict_8x8c );
x264_predict_8x16c_init( h->param.cpu, h->predict_8x16c );
x264_predict_8x8_init( h->param.cpu, h->predict_8x8, &h->predict_8x8_filter );
x264_predict_4x4_init( h->param.cpu, h->predict_4x4 );
//SAD等和像素计算有关的函数
x264_pixel_init( h->param.cpu, &h->pixf );
//DCT
x264_dct_init( h->param.cpu, &h->dctf );
//“之”字扫描
x264_zigzag_init( h->param.cpu, &h->zigzagf_progressive, &h->zigzagf_interlaced );
memcpy( &h->zigzagf, PARAM_INTERLACED ? &h->zigzagf_interlaced : &h->zigzagf_progressive, sizeof(h->zigzagf) );
//运动补偿
x264_mc_init( h->param.cpu, &h->mc, h->param.b_cpu_independent );
//量化
x264_quant_init( h, h->param.cpu, &h->quantf );
//去块效应滤波
x264_deblock_init( h->param.cpu, &h->loopf, PARAM_INTERLACED );
x264_bitstream_init( h->param.cpu, &h->bsf );
//初始化CABAC或者是CAVLC
if( h->param.b_cabac )
x264_cabac_init( h );
else
x264_stack_align( x264_cavlc_init, h );
//决定了像素比较的时候用SAD还是SATD
mbcmp_init( h );
chroma_dsp_init( h );
//CPU属性
p = buf + sprintf( buf, "using cpu capabilities:" );
for( int i = 0; x264_cpu_names[i].flags; i++ )
{
if( !strcmp(x264_cpu_names[i].name, "SSE")
&& h->param.cpu & (X264_CPU_SSE2) )
continue;
if( !strcmp(x264_cpu_names[i].name, "SSE2")
&& h->param.cpu & (X264_CPU_SSE2_IS_FAST|X264_CPU_SSE2_IS_SLOW) )
continue;
if( !strcmp(x264_cpu_names[i].name, "SSE3")
&& (h->param.cpu & X264_CPU_SSSE3 || !(h->param.cpu & X264_CPU_CACHELINE_64)) )
continue;
if( !strcmp(x264_cpu_names[i].name, "SSE4.1")
&& (h->param.cpu & X264_CPU_SSE42) )
continue;
if( !strcmp(x264_cpu_names[i].name, "BMI1")
&& (h->param.cpu & X264_CPU_BMI2) )
continue;
if( (h->param.cpu & x264_cpu_names[i].flags) == x264_cpu_names[i].flags
&& (!i || x264_cpu_names[i].flags != x264_cpu_names[i-1].flags) )
p += sprintf( p, " %s", x264_cpu_names[i].name );
}
if( !h->param.cpu )
p += sprintf( p, " none!" );
x264_log( h, X264_LOG_INFO, "%s\n", buf );
float *logs = x264_analyse_prepare_costs( h );
if( !logs )
goto fail;
for( qp = X264_MIN( h->param.rc.i_qp_min, QP_MAX_SPEC ); qp <= h->param.rc.i_qp_max; qp++ )
if( x264_analyse_init_costs( h, logs, qp ) )
goto fail;
if( x264_analyse_init_costs( h, logs, X264_LOOKAHEAD_QP ) )
goto fail;
x264_free( logs );
static const uint16_t cost_mv_correct[7] = { 24, 47, 95, 189, 379, 757, 1515 };
/* Checks for known miscompilation issues. */
if( h->cost_mv[X264_LOOKAHEAD_QP][2013] != cost_mv_correct[BIT_DEPTH-8] )
{
x264_log( h, X264_LOG_ERROR, "MV cost test failed: x264 has been miscompiled!\n" );
goto fail;
}
/* Must be volatile or else GCC will optimize it out. */
volatile int temp = 392;
if( x264_clz( temp ) != 23 )
{
x264_log( h, X264_LOG_ERROR, "CLZ test failed: x264 has been miscompiled!\n" );
#if ARCH_X86 || ARCH_X86_64
x264_log( h, X264_LOG_ERROR, "Are you attempting to run an SSE4a/LZCNT-targeted build on a CPU that\n" );
x264_log( h, X264_LOG_ERROR, "doesn't support it?\n" );
#endif
goto fail;
}
h->out.i_nal = 0;
h->out.i_bitstream = X264_MAX( 1000000, h->param.i_width * h->param.i_height * 4
* ( h->param.rc.i_rc_method == X264_RC_ABR ? pow( 0.95, h->param.rc.i_qp_min )
: pow( 0.95, h->param.rc.i_qp_constant ) * X264_MAX( 1, h->param.rc.f_ip_factor )));
h->nal_buffer_size = h->out.i_bitstream * 3/2 + 4 + 64; /* +4 for startcode, +64 for nal_escape assembly padding */
CHECKED_MALLOC( h->nal_buffer, h->nal_buffer_size );
CHECKED_MALLOC( h->reconfig_h, sizeof(x264_t) );
if( h->param.i_threads > 1 &&
x264_threadpool_init( &h->threadpool, h->param.i_threads, (void*)x264_encoder_thread_init, h ) )
goto fail;
if( h->param.i_lookahead_threads > 1 &&
x264_threadpool_init( &h->lookaheadpool, h->param.i_lookahead_threads, NULL, NULL ) )
goto fail;
#if HAVE_OPENCL
if( h->param.b_opencl )
{
h->opencl.ocl = x264_opencl_load_library();
if( !h->opencl.ocl )
{
x264_log( h, X264_LOG_WARNING, "failed to load OpenCL\n" );
h->param.b_opencl = 0;
}
}
#endif
h->thread[0] = h;
for( int i = 1; i < h->param.i_threads + !!h->param.i_sync_lookahead; i++ )
CHECKED_MALLOC( h->thread[i], sizeof(x264_t) );
if( h->param.i_lookahead_threads > 1 )
for( int i = 0; i < h->param.i_lookahead_threads; i++ )
{
CHECKED_MALLOC( h->lookahead_thread[i], sizeof(x264_t) );
*h->lookahead_thread[i] = *h;
}
*h->reconfig_h = *h;
for( int i = 0; i < h->param.i_threads; i++ )
{
int init_nal_count = h->param.i_slice_count + 3;
int allocate_threadlocal_data = !h->param.b_sliced_threads || !i;
if( i > 0 )
*h->thread[i] = *h;
if( x264_pthread_mutex_init( &h->thread[i]->mutex, NULL ) )
goto fail;
if( x264_pthread_cond_init( &h->thread[i]->cv, NULL ) )
goto fail;
if( allocate_threadlocal_data )
{
h->thread[i]->fdec = x264_frame_pop_unused( h, 1 );
if( !h->thread[i]->fdec )
goto fail;
}
else
h->thread[i]->fdec = h->thread[0]->fdec;
CHECKED_MALLOC( h->thread[i]->out.p_bitstream, h->out.i_bitstream );
/* Start each thread with room for init_nal_count NAL units; it'll realloc later if needed. */
CHECKED_MALLOC( h->thread[i]->out.nal, init_nal_count*sizeof(x264_nal_t) );
h->thread[i]->out.i_nals_allocated = init_nal_count;
if( allocate_threadlocal_data && x264_macroblock_cache_allocate( h->thread[i] ) < 0 )
goto fail;
}
#if HAVE_OPENCL
if( h->param.b_opencl && x264_opencl_lookahead_init( h ) < 0 )
h->param.b_opencl = 0;
#endif
//初始化lookahead
if( x264_lookahead_init( h, i_slicetype_length ) )
goto fail;
for( int i = 0; i < h->param.i_threads; i++ )
if( x264_macroblock_thread_allocate( h->thread[i], 0 ) < 0 )
goto fail;
//创建码率控制
if( x264_ratecontrol_new( h ) < 0 )
goto fail;
if( h->param.i_nal_hrd )
{
x264_log( h, X264_LOG_DEBUG, "HRD bitrate: %i bits/sec\n", h->sps->vui.hrd.i_bit_rate_unscaled );
x264_log( h, X264_LOG_DEBUG, "CPB size: %i bits\n", h->sps->vui.hrd.i_cpb_size_unscaled );
}
if( h->param.psz_dump_yuv )
{
/* create or truncate the reconstructed video file */
FILE *f = x264_fopen( h->param.psz_dump_yuv, "w" );
if( !f )
{
x264_log( h, X264_LOG_ERROR, "dump_yuv: can't write to %s\n", h->param.psz_dump_yuv );
goto fail;
}
else if( !x264_is_regular_file( f ) )
{
x264_log( h, X264_LOG_ERROR, "dump_yuv: incompatible with non-regular file %s\n", h->param.psz_dump_yuv );
goto fail;
}
fclose( f );
}
//这写法......
const char *profile = h->sps->i_profile_idc == PROFILE_BASELINE ? "Constrained Baseline" :
h->sps->i_profile_idc == PROFILE_MAIN ? "Main" :
h->sps->i_profile_idc == PROFILE_HIGH ? "High" :
h->sps->i_profile_idc == PROFILE_HIGH10 ? (h->sps->b_constraint_set3 == 1 ? "High 10 Intra" : "High 10") :
h->sps->i_profile_idc == PROFILE_HIGH422 ? (h->sps->b_constraint_set3 == 1 ? "High 4:2:2 Intra" : "High 4:2:2") :
h->sps->b_constraint_set3 == 1 ? "High 4:4:4 Intra" : "High 4:4:4 Predictive";
char level[4];
snprintf( level, sizeof(level), "%d.%d", h->sps->i_level_idc/10, h->sps->i_level_idc%10 );
if( h->sps->i_level_idc == 9 || ( h->sps->i_level_idc == 11 && h->sps->b_constraint_set3 &&
(h->sps->i_profile_idc == PROFILE_BASELINE || h->sps->i_profile_idc == PROFILE_MAIN) ) )
strcpy( level, "1b" );
//输出型和级
if( h->sps->i_profile_idc < PROFILE_HIGH10 )
{
x264_log( h, X264_LOG_INFO, "profile %s, level %s\n",
profile, level );
}
else
{
static const char * const subsampling[4] = { "4:0:0", "4:2:0", "4:2:2", "4:4:4" };
x264_log( h, X264_LOG_INFO, "profile %s, level %s, %s %d-bit\n",
profile, level, subsampling[CHROMA_FORMAT], BIT_DEPTH );
}
return h;
fail:
//释放
x264_free( h );
return NULL;
}
由于源代码中已经做了比较详细的注释,在这里就不重复叙述了。下面根据函数调用的顺序,看一下x264_encoder_open()调用的下面几个函数:
x264_sps_init():根据输入参数生成H.264码流的SPS信息。
x264_pps_init():根据输入参数生成H.264码流的PPS信息。
x264_predict_16x16_init():初始化Intra16x16帧内预测汇编函数。
x264_predict_4x4_init():初始化Intra4x4帧内预测汇编函数。
x264_pixel_init():初始化像素值计算相关的汇编函数(包括SAD、SATD、SSD等)。
x264_dct_init():初始化DCT变换和DCT反变换相关的汇编函数。
x264_mc_init():初始化运动补偿相关的汇编函数。
x264_quant_init():初始化量化和反量化相关的汇编函数。
x264_deblock_init():初始化去块效应滤波器相关的汇编函数。
mbcmp_init():决定像素比较的时候使用SAD还是SATD。
x264_sps_init()
x264_sps_init()根据输入参数生成H.264码流的SPS (Sequence Parameter Set,序列参数集)信息。该函数的定义位于encoder\set.c,如下所示。//初始化SPS
void x264_sps_init( x264_sps_t *sps, int i_id, x264_param_t *param )
{
int csp = param->i_csp & X264_CSP_MASK;
sps->i_id = i_id;
//以宏块为单位的宽度
sps->i_mb_width = ( param->i_width + 15 ) / 16;
//以宏块为单位的高度
sps->i_mb_height= ( param->i_height + 15 ) / 16;
//色度取样格式
sps->i_chroma_format_idc = csp >= X264_CSP_I444 ? CHROMA_444 :
csp >= X264_CSP_I422 ? CHROMA_422 : CHROMA_420;
sps->b_qpprime_y_zero_transform_bypass = param->rc.i_rc_method == X264_RC_CQP && param->rc.i_qp_constant == 0;
//型profile
if( sps->b_qpprime_y_zero_transform_bypass || sps->i_chroma_format_idc == CHROMA_444 )
sps->i_profile_idc = PROFILE_HIGH444_PREDICTIVE;//YUV444的时候
else if( sps->i_chroma_format_idc == CHROMA_422 )
sps->i_profile_idc = PROFILE_HIGH422;
else if( BIT_DEPTH > 8 )
sps->i_profile_idc = PROFILE_HIGH10;
else if( param->analyse.b_transform_8x8 || param->i_cqm_preset != X264_CQM_FLAT )
sps->i_profile_idc = PROFILE_HIGH;//高型 High Profile 目前最常见
else if( param->b_cabac || param->i_bframe > 0 || param->b_interlaced || param->b_fake_interlaced || param->analyse.i_weighted_pred > 0 )
sps->i_profile_idc = PROFILE_MAIN;//主型
else
sps->i_profile_idc = PROFILE_BASELINE;//基本型
sps->b_constraint_set0 = sps->i_profile_idc == PROFILE_BASELINE;
/* x264 doesn't support the features that are in Baseline and not in Main,
* namely arbitrary_slice_order and slice_groups. */
sps->b_constraint_set1 = sps->i_profile_idc <= PROFILE_MAIN;
/* Never set constraint_set2, it is not necessary and not used in real world. */
sps->b_constraint_set2 = 0;
sps->b_constraint_set3 = 0;
//级level
sps->i_level_idc = param->i_level_idc;
if( param->i_level_idc == 9 && ( sps->i_profile_idc == PROFILE_BASELINE || sps->i_profile_idc == PROFILE_MAIN ) )
{
sps->b_constraint_set3 = 1; /* level 1b with Baseline or Main profile is signalled via constraint_set3 */
sps->i_level_idc = 11;
}
/* Intra profiles */
if( param->i_keyint_max == 1 && sps->i_profile_idc > PROFILE_HIGH )
sps->b_constraint_set3 = 1;
sps->vui.i_num_reorder_frames = param->i_bframe_pyramid ? 2 : param->i_bframe ? 1 : 0;
/* extra slot with pyramid so that we don't have to override the
* order of forgetting old pictures */
//参考帧数量
sps->vui.i_max_dec_frame_buffering =
sps->i_num_ref_frames = X264_MIN(X264_REF_MAX, X264_MAX4(param->i_frame_reference, 1 + sps->vui.i_num_reorder_frames,
param->i_bframe_pyramid ? 4 : 1, param->i_dpb_size));
sps->i_num_ref_frames -= param->i_bframe_pyramid == X264_B_PYRAMID_STRICT;
if( param->i_keyint_max == 1 )
{
sps->i_num_ref_frames = 0;
sps->vui.i_max_dec_frame_buffering = 0;
}
/* number of refs + current frame */
int max_frame_num = sps->vui.i_max_dec_frame_buffering * (!!param->i_bframe_pyramid+1) + 1;
/* Intra refresh cannot write a recovery time greater than max frame num-1 */
if( param->b_intra_refresh )
{
int time_to_recovery = X264_MIN( sps->i_mb_width - 1, param->i_keyint_max ) + param->i_bframe - 1;
max_frame_num = X264_MAX( max_frame_num, time_to_recovery+1 );
}
sps->i_log2_max_frame_num = 4;
while( (1 << sps->i_log2_max_frame_num) <= max_frame_num )
sps->i_log2_max_frame_num++;
//POC类型
sps->i_poc_type = param->i_bframe || param->b_interlaced ? 0 : 2;
if( sps->i_poc_type == 0 )
{
int max_delta_poc = (param->i_bframe + 2) * (!!param->i_bframe_pyramid + 1) * 2;
sps->i_log2_max_poc_lsb = 4;
while( (1 << sps->i_log2_max_poc_lsb) <= max_delta_poc * 2 )
sps->i_log2_max_poc_lsb++;
}
sps->b_vui = 1;
sps->b_gaps_in_frame_num_value_allowed = 0;
sps->b_frame_mbs_only = !(param->b_interlaced || param->b_fake_interlaced);
if( !sps->b_frame_mbs_only )
sps->i_mb_height = ( sps->i_mb_height + 1 ) & ~1;
sps->b_mb_adaptive_frame_field = param->b_interlaced;
sps->b_direct8x8_inference = 1;
sps->crop.i_left = param->crop_rect.i_left;
sps->crop.i_top = param->crop_rect.i_top;
sps->crop.i_right = param->crop_rect.i_right + sps->i_mb_width*16 - param->i_width;
sps->crop.i_bottom = (param->crop_rect.i_bottom + sps->i_mb_height*16 - param->i_height) >> !sps->b_frame_mbs_only;
sps->b_crop = sps->crop.i_left || sps->crop.i_top ||
sps->crop.i_right || sps->crop.i_bottom;
sps->vui.b_aspect_ratio_info_present = 0;
if( param->vui.i_sar_width > 0 && param->vui.i_sar_height > 0 )
{
sps->vui.b_aspect_ratio_info_present = 1;
sps->vui.i_sar_width = param->vui.i_sar_width;
sps->vui.i_sar_height= param->vui.i_sar_height;
}
sps->vui.b_overscan_info_present = param->vui.i_overscan > 0 && param->vui.i_overscan <= 2;
if( sps->vui.b_overscan_info_present )
sps->vui.b_overscan_info = ( param->vui.i_overscan == 2 ? 1 : 0 );
sps->vui.b_signal_type_present = 0;
sps->vui.i_vidformat = ( param->vui.i_vidformat >= 0 && param->vui.i_vidformat <= 5 ? param->vui.i_vidformat : 5 );
sps->vui.b_fullrange = ( param->vui.b_fullrange >= 0 && param->vui.b_fullrange <= 1 ? param->vui.b_fullrange :
( csp >= X264_CSP_BGR ? 1 : 0 ) );
sps->vui.b_color_description_present = 0;
sps->vui.i_colorprim = ( param->vui.i_colorprim >= 0 && param->vui.i_colorprim <= 9 ? param->vui.i_colorprim : 2 );
sps->vui.i_transfer = ( param->vui.i_transfer >= 0 && param->vui.i_transfer <= 15 ? param->vui.i_transfer : 2 );
sps->vui.i_colmatrix = ( param->vui.i_colmatrix >= 0 && param->vui.i_colmatrix <= 10 ? param->vui.i_colmatrix :
( csp >= X264_CSP_BGR ? 0 : 2 ) );
if( sps->vui.i_colorprim != 2 ||
sps->vui.i_transfer != 2 ||
sps->vui.i_colmatrix != 2 )
{
sps->vui.b_color_description_present = 1;
}
if( sps->vui.i_vidformat != 5 ||
sps->vui.b_fullrange ||
sps->vui.b_color_description_present )
{
sps->vui.b_signal_type_present = 1;
}
/* FIXME: not sufficient for interlaced video */
sps->vui.b_chroma_loc_info_present = param->vui.i_chroma_loc > 0 && param->vui.i_chroma_loc <= 5 &&
sps->i_chroma_format_idc == CHROMA_420;
if( sps->vui.b_chroma_loc_info_present )
{
sps->vui.i_chroma_loc_top = param->vui.i_chroma_loc;
sps->vui.i_chroma_loc_bottom = param->vui.i_chroma_loc;
}
sps->vui.b_timing_info_present = param->i_timebase_num > 0 && param->i_timebase_den > 0;
if( sps->vui.b_timing_info_present )
{
sps->vui.i_num_units_in_tick = param->i_timebase_num;
sps->vui.i_time_scale = param->i_timebase_den * 2;
sps->vui.b_fixed_frame_rate = !param->b_vfr_input;
}
sps->vui.b_vcl_hrd_parameters_present = 0; // we don't support VCL HRD
sps->vui.b_nal_hrd_parameters_present = !!param->i_nal_hrd;
sps->vui.b_pic_struct_present = param->b_pic_struct;
// NOTE: HRD related parts of the SPS are initialised in x264_ratecontrol_init_reconfigurable
sps->vui.b_bitstream_restriction = param->i_keyint_max > 1;
if( sps->vui.b_bitstream_restriction )
{
sps->vui.b_motion_vectors_over_pic_boundaries = 1;
sps->vui.i_max_bytes_per_pic_denom = 0;
sps->vui.i_max_bits_per_mb_denom = 0;
sps->vui.i_log2_max_mv_length_horizontal =
sps->vui.i_log2_max_mv_length_vertical = (int)log2f( X264_MAX( 1, param->analyse.i_mv_range*4-1 ) ) + 1;
}
}
从源代码可以看出,x264_sps_init()根据输入参数集x264_param_t中的信息,初始化了SPS结构体中的成员变量。有关这些成员变量的具体信息,可以参考《H.264标准》。
x264_pps_init()
x264_pps_init()根据输入参数生成H.264码流的PPS(Picture Parameter Set,图像参数集)信息。该函数的定义位于encoder\set.c,如下所示。//初始化PPS
void x264_pps_init( x264_pps_t *pps, int i_id, x264_param_t *param, x264_sps_t *sps )
{
pps->i_id = i_id;
//所属的SPS
pps->i_sps_id = sps->i_id;
//是否使用CABAC?
pps->b_cabac = param->b_cabac;
pps->b_pic_order = !param->i_avcintra_class && param->b_interlaced;
pps->i_num_slice_groups = 1;
//目前参考帧队列的长度
//注意是这个队列中当前实际的、已存在的参考帧数目,这从它的名字“active”中也可以看出来。
pps->i_num_ref_idx_l0_default_active = param->i_frame_reference;
pps->i_num_ref_idx_l1_default_active = 1;
//加权预测
pps->b_weighted_pred = param->analyse.i_weighted_pred > 0;
pps->b_weighted_bipred = param->analyse.b_weighted_bipred ? 2 : 0;
//量化参数QP的初始值
pps->i_pic_init_qp = param->rc.i_rc_method == X264_RC_ABR || param->b_stitchable ? 26 + QP_BD_OFFSET : SPEC_QP( param->rc.i_qp_constant );
pps->i_pic_init_qs = 26 + QP_BD_OFFSET;
pps->i_chroma_qp_index_offset = param->analyse.i_chroma_qp_offset;
pps->b_deblocking_filter_control = 1;
pps->b_constrained_intra_pred = param->b_constrained_intra;
pps->b_redundant_pic_cnt = 0;
pps->b_transform_8x8_mode = param->analyse.b_transform_8x8 ? 1 : 0;
pps->i_cqm_preset = param->i_cqm_preset;
switch( pps->i_cqm_preset )
{
case X264_CQM_FLAT:
for( int i = 0; i < 8; i++ )
pps->scaling_list[i] = x264_cqm_flat16;
break;
case X264_CQM_JVT:
for( int i = 0; i < 8; i++ )
pps->scaling_list[i] = x264_cqm_jvt[i];
break;
case X264_CQM_CUSTOM:
/* match the transposed DCT & zigzag */
transpose( param->cqm_4iy, 4 );
transpose( param->cqm_4py, 4 );
transpose( param->cqm_4ic, 4 );
transpose( param->cqm_4pc, 4 );
transpose( param->cqm_8iy, 8 );
transpose( param->cqm_8py, 8 );
transpose( param->cqm_8ic, 8 );
transpose( param->cqm_8pc, 8 );
pps->scaling_list[CQM_4IY] = param->cqm_4iy;
pps->scaling_list[CQM_4PY] = param->cqm_4py;
pps->scaling_list[CQM_4IC] = param->cqm_4ic;
pps->scaling_list[CQM_4PC] = param->cqm_4pc;
pps->scaling_list[CQM_8IY+4] = param->cqm_8iy;
pps->scaling_list[CQM_8PY+4] = param->cqm_8py;
pps->scaling_list[CQM_8IC+4] = param->cqm_8ic;
pps->scaling_list[CQM_8PC+4] = param->cqm_8pc;
for( int i = 0; i < 8; i++ )
for( int j = 0; j < (i < 4 ? 16 : 64); j++ )
if( pps->scaling_list[i][j] == 0 )
pps->scaling_list[i] = x264_cqm_jvt[i];
break;
}
}
从源代码可以看出,x264_pps_init()根据输入参数集x264_param_t中的信息,初始化了PPS结构体中的成员变量。有关这些成员变量的具体信息,可以参考《H.264标准》。
x264_predict_16x16_init()
x264_predict_16x16_init()用于初始化Intra16x16帧内预测汇编函数。该函数的定义位于x264\common\predict.c,如下所示。//Intra16x16帧内预测汇编函数初始化
void x264_predict_16x16_init( int cpu, x264_predict_t pf[7] )
{
//C语言版本
//================================================
//垂直 Vertical
pf[I_PRED_16x16_V ] = x264_predict_16x16_v_c;
//水平 Horizontal
pf[I_PRED_16x16_H ] = x264_predict_16x16_h_c;
//DC
pf[I_PRED_16x16_DC] = x264_predict_16x16_dc_c;
//Plane
pf[I_PRED_16x16_P ] = x264_predict_16x16_p_c;
//这几种是啥?
pf[I_PRED_16x16_DC_LEFT]= x264_predict_16x16_dc_left_c;
pf[I_PRED_16x16_DC_TOP ]= x264_predict_16x16_dc_top_c;
pf[I_PRED_16x16_DC_128 ]= x264_predict_16x16_dc_128_c;
//================================================
//MMX版本
#if HAVE_MMX
x264_predict_16x16_init_mmx( cpu, pf );
#endif
//ALTIVEC版本
#if HAVE_ALTIVEC
if( cpu&X264_CPU_ALTIVEC )
x264_predict_16x16_init_altivec( pf );
#endif
//ARMV6版本
#if HAVE_ARMV6
x264_predict_16x16_init_arm( cpu, pf );
#endif
//AARCH64版本
#if ARCH_AARCH64
x264_predict_16x16_init_aarch64( cpu, pf );
#endif
}
从源代码可看出,x264_predict_16x16_init()首先对帧内预测函数指针数组x264_predict_t[]中的元素赋值了C语言版本的函数x264_predict_16x16_v_c(),x264_predict_16x16_h_c(),x264_predict_16x16_dc_c(),x264_predict_16x16_p_c();然后会判断系统平台的特性,如果平台支持的话,会调用x264_predict_16x16_init_mmx(),x264_predict_16x16_init_arm()等给x264_predict_t[]中的元素赋值经过汇编优化的函数。下文将会简单看几个其中的函数。
相关知识简述
简单记录一下帧内预测的方法。帧内预测根据宏块左边和上边的边界像素值推算宏块内部的像素值,帧内预测的效果如下图所示。其中左边的图为图像原始画面,右边的图为经过帧内预测后没有叠加残差的画面。


模式 |
描述 |
Vertical |
由上边像素推出相应像素值 |
Horizontal |
由左边像素推出相应像素值 |
DC |
由上边和左边像素平均值推出相应像素值 |
Plane |
由上边和左边像素推出相应像素值 |
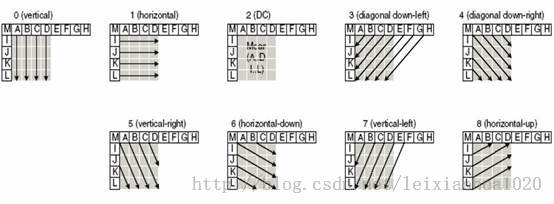
4x4帧内预测模式一共有9种,如下图所示。
x264_predict_16x16_v_c()
x264_predict_16x16_v_c()实现了Intra16x16的Vertical预测模式。该函数的定义位于common\predict.c,如下所示。//16x16帧内预测
//垂直预测(Vertical)
void x264_predict_16x16_v_c( pixel *src )
{
/*
* Vertical预测方式
* |X1 X2 X3 X4
* --+-----------
* |X1 X2 X3 X4
* |X1 X2 X3 X4
* |X1 X2 X3 X4
* |X1 X2 X3 X4
*
*/
/*
* 【展开宏定义】
* uint32_t v0 = ((x264_union32_t*)(&src[ 0-FDEC_STRIDE]))->i;
* uint32_t v1 = ((x264_union32_t*)(&src[ 4-FDEC_STRIDE]))->i;
* uint32_t v2 = ((x264_union32_t*)(&src[ 8-FDEC_STRIDE]))->i;
* uint32_t v3 = ((x264_union32_t*)(&src[12-FDEC_STRIDE]))->i;
* 在这里,上述代码实际上相当于:
* uint32_t v0 = *((uint32_t*)(&src[ 0-FDEC_STRIDE]));
* uint32_t v1 = *((uint32_t*)(&src[ 4-FDEC_STRIDE]));
* uint32_t v2 = *((uint32_t*)(&src[ 8-FDEC_STRIDE]));
* uint32_t v3 = *((uint32_t*)(&src[12-FDEC_STRIDE]));
* 即分成4次,每次取出4个像素(一共16个像素),分别赋值给v0,v1,v2,v3
* 取出的值源自于16x16块上面的一行像素
* 0| 4 8 12 16
* || v0 | v1 | v2 | v3 |
* ---++==========+==========+==========+==========+
* ||
* ||
* ||
* ||
* ||
* ||
*
*/
//pixel4实际上是uint32_t(占用32bit),存储4个像素的值(每个像素占用8bit)
pixel4 v0 = MPIXEL_X4( &src[ 0-FDEC_STRIDE] );
pixel4 v1 = MPIXEL_X4( &src[ 4-FDEC_STRIDE] );
pixel4 v2 = MPIXEL_X4( &src[ 8-FDEC_STRIDE] );
pixel4 v3 = MPIXEL_X4( &src[12-FDEC_STRIDE] );
//循环赋值16行
for( int i = 0; i < 16; i++ )
{
//【展开宏定义】
//(((x264_union32_t*)(src+ 0))->i) = v0;
//(((x264_union32_t*)(src+ 4))->i) = v1;
//(((x264_union32_t*)(src+ 8))->i) = v2;
//(((x264_union32_t*)(src+12))->i) = v3;
//即分成4次,每次赋值4个像素
//
MPIXEL_X4( src+ 0 ) = v0;
MPIXEL_X4( src+ 4 ) = v1;
MPIXEL_X4( src+ 8 ) = v2;
MPIXEL_X4( src+12 ) = v3;
//下一行
//FDEC_STRIDE=32,是重建宏块缓存fdec_buf一行的数据量
src += FDEC_STRIDE;
}
}
从源代码可以看出,x264_predict_16x16_v_c()首先取出了16x16图像块上面一行16个像素的值存储在v0,v1,v2,v3四个变量中(每个变量存储4个像素),然后循环16次将v0,v1,v2,v3赋值给16x16图像块的16行。
看完C语言版本Intra16x16的Vertical预测模式的实现函数之后,我们可以继续看一下该预测模式汇编语言版本的实现函数。从前面的初始化函数中已经可以看出,当系统支持X86汇编的时候,会调用x264_predict_16x16_init_mmx()初始化x86汇编优化过的函数;当系统支持ARM的时候,会调用x264_predict_16x16_init_arm()初始化ARM汇编优化过的函数。x264_predict_16x16_init_mmx()
x264_predict_16x16_init_mmx()用于初始化经过x86汇编优化过的Intra16x16的帧内预测函数。该函数的定义位于common\x86\predict-c.c(在“x86”子文件夹下),如下所示。//Intra16x16帧内预测汇编函数-MMX版本
void x264_predict_16x16_init_mmx( int cpu, x264_predict_t pf[7] )
{
if( !(cpu&X264_CPU_MMX2) )
return;
pf[I_PRED_16x16_DC] = x264_predict_16x16_dc_mmx2;
pf[I_PRED_16x16_DC_TOP] = x264_predict_16x16_dc_top_mmx2;
pf[I_PRED_16x16_DC_LEFT] = x264_predict_16x16_dc_left_mmx2;
pf[I_PRED_16x16_V] = x264_predict_16x16_v_mmx2;
pf[I_PRED_16x16_H] = x264_predict_16x16_h_mmx2;
#if HIGH_BIT_DEPTH
if( !(cpu&X264_CPU_SSE) )
return;
pf[I_PRED_16x16_V] = x264_predict_16x16_v_sse;
if( !(cpu&X264_CPU_SSE2) )
return;
pf[I_PRED_16x16_DC] = x264_predict_16x16_dc_sse2;
pf[I_PRED_16x16_DC_TOP] = x264_predict_16x16_dc_top_sse2;
pf[I_PRED_16x16_DC_LEFT] = x264_predict_16x16_dc_left_sse2;
pf[I_PRED_16x16_H] = x264_predict_16x16_h_sse2;
pf[I_PRED_16x16_P] = x264_predict_16x16_p_sse2;
if( !(cpu&X264_CPU_AVX) )
return;
pf[I_PRED_16x16_V] = x264_predict_16x16_v_avx;
if( !(cpu&X264_CPU_AVX2) )
return;
pf[I_PRED_16x16_H] = x264_predict_16x16_h_avx2;
#else
#if !ARCH_X86_64
pf[I_PRED_16x16_P] = x264_predict_16x16_p_mmx2;
#endif
if( !(cpu&X264_CPU_SSE) )
return;
pf[I_PRED_16x16_V] = x264_predict_16x16_v_sse;
if( !(cpu&X264_CPU_SSE2) )
return;
pf[I_PRED_16x16_DC] = x264_predict_16x16_dc_sse2;
if( cpu&X264_CPU_SSE2_IS_SLOW )
return;
pf[I_PRED_16x16_DC_TOP] = x264_predict_16x16_dc_top_sse2;
pf[I_PRED_16x16_DC_LEFT] = x264_predict_16x16_dc_left_sse2;
pf[I_PRED_16x16_P] = x264_predict_16x16_p_sse2;
if( !(cpu&X264_CPU_SSSE3) )
return;
if( !(cpu&X264_CPU_SLOW_PSHUFB) )
pf[I_PRED_16x16_H] = x264_predict_16x16_h_ssse3;
#if HAVE_X86_INLINE_ASM
pf[I_PRED_16x16_P] = x264_predict_16x16_p_ssse3;
#endif
if( !(cpu&X264_CPU_AVX) )
return;
pf[I_PRED_16x16_P] = x264_predict_16x16_p_avx;
#endif // HIGH_BIT_DEPTH
if( cpu&X264_CPU_AVX2 )
{
pf[I_PRED_16x16_P] = x264_predict_16x16_p_avx2;
pf[I_PRED_16x16_DC] = x264_predict_16x16_dc_avx2;
pf[I_PRED_16x16_DC_TOP] = x264_predict_16x16_dc_top_avx2;
pf[I_PRED_16x16_DC_LEFT] = x264_predict_16x16_dc_left_avx2;
}
}
可以看出,针对Intra16x16的Vertical帧内预测模式,x264_predict_16x16_init_mmx()会根据系统的特型初始化2个函数:如果系统仅支持MMX指令集,就会初始化x264_predict_16x16_v_mmx2();如果系统还支持SSE指令集,就会初始化x264_predict_16x16_v_sse()。下面看一下这2个函数的代码。
x264_predict_16x16_v_mmx2()
x264_predict_16x16_v_sse()
在x264中,x264_predict_16x16_v_mmx2()和x264_predict_16x16_v_sse()这两个函数的定义是写到一起的。它们的定义位于common\x86\predict-a.asm,如下所示。;-----------------------------------------------------------------------------
; void predict_16x16_v( pixel *src )
; Intra16x16帧内预测Vertical模式
;-----------------------------------------------------------------------------
;SIZEOF_PIXEL取值为1
;FDEC_STRIDEB为重建宏块缓存fdec_buf一行像素的大小,取值为32
;
;平台相关的信息位于x86inc.asm
;INIT_MMX中
; mmsize为8
; mova为movq
;INIT_XMM中:
; mmsize为16
; mova为movdqa
;
;STORE16的定义在前面,用于循环16行存储数据
%macro PREDICT_16x16_V 0
cglobal predict_16x16_v, 1,2
%assign %%i 0
%rep 16*SIZEOF_PIXEL/mmsize ;rep循环执行,拷贝16x16块上方的1行像素数据至m0,m1...
;mmssize为指令1次处理比特数
mova m %+ %%i, [r0-FDEC_STRIDEB+%%i*mmsize] ;移入m0,m1...
%assign %%i %%i+1
%endrep
%if 16*SIZEOF_PIXEL/mmsize == 4 ;1行需要处理4次
STORE16 m0, m1, m2, m3 ;循环存储16行,每次存储4个寄存器
%elif 16*SIZEOF_PIXEL/mmsize == 2 ;1行需要处理2次
STORE16 m0, m1 ;循环存储16行,每次存储2个寄存器
%else ;1行需要处理1次
STORE16 m0 ;循环存储16行,每次存储1个寄存器
%endif
RET
%endmacro
INIT_MMX mmx2
PREDICT_16x16_V
INIT_XMM sse
PREDICT_16x16_V
从汇编代码可以看出,x264_predict_16x16_v_mmx2()和x264_predict_16x16_v_sse()的逻辑是一模一样的。它们之间的不同主要在于一条指令处理的数据量:MMX指令的MOVA对应的是MOVQ,一次处理8Byte(8个像素);SSE指令的MOVA对应的是MOVDQA,一次处理16Byte(16个像素,正好是16x16块中的一行像素)。
作为对比,我们可以看一下ARM平台下汇编优化过的Intra16x16的帧内预测函数。这些汇编函数的初始化函数是x264_predict_16x16_init_arm()。
x264_predict_16x16_init_arm()
x264_predict_16x16_init_arm()用于初始化ARM平台下汇编优化过的Intra16x16的帧内预测函数。该函数的定义位于common\arm\predict-c.c(“arm”文件夹下),如下所示。void x264_predict_16x16_init_arm( int cpu, x264_predict_t pf[7] )
{
if (!(cpu&X264_CPU_NEON))
return;
#if !HIGH_BIT_DEPTH
pf[I_PRED_16x16_DC ] = x264_predict_16x16_dc_neon;
pf[I_PRED_16x16_DC_TOP] = x264_predict_16x16_dc_top_neon;
pf[I_PRED_16x16_DC_LEFT]= x264_predict_16x16_dc_left_neon;
pf[I_PRED_16x16_H ] = x264_predict_16x16_h_neon;
pf[I_PRED_16x16_V ] = x264_predict_16x16_v_neon;
pf[I_PRED_16x16_P ] = x264_predict_16x16_p_neon;
#endif // !HIGH_BIT_DEPTH
}
从源代码可以看出,针对Vertical预测模式,x264_predict_16x16_init_arm()初始化了经过NEON指令集优化的函数x264_predict_16x16_v_neon()。
x264_predict_16x16_v_neon()
x264_predict_16x16_v_neon()的定义位于common\arm\predict-a.S,如下所示。/*
* Intra16x16帧内预测Vertical模式-NEON
*
*/
/* FDEC_STRIDE=32Bytes,为重建宏块一行像素的大小 */
/* R0存储16x16像素块地址 */
function x264_predict_16x16_v_neon
sub r0, r0, #FDEC_STRIDE /* r0=r0-FDEC_STRIDE */
mov ip, #FDEC_STRIDE /* ip=32 */
/* VLD向量加载: 内存->NEON寄存器 */
/* d0,d1为64bit双字寄存器,共16Byte,在这里存储16x16块上方一行像素 */
vld1.64 {d0-d1}, [r0,:128], ip /* 将R0指向的数据从内存加载到d0和d1寄存器(64bit) */
/* r0=r0+ip */
.rept 16 /* 循环16次,一次处理1行 */
/* VST向量存储: NEON寄存器->内存 */
vst1.64 {d0-d1}, [r0,:128], ip /* 将d0和d1寄存器中的数据传递给R0指向的内存 */
/* r0=r0+ip */
.endr
bx lr /* 子程序返回 */
endfunc
可以看出,x264_predict_16x16_v_neon()使用vld1.64指令载入16x16块上方的一行像素,然后在一个16次的循环中,使用vst1.64指令将该行像素值赋值给16x16块的每一行。
至此有关Intra16x16的Vertical帧内预测方式的源代码就分析完了。后文为了简便,都只讨论C语言版本汇编函数。
x264_predict_4x4_init()
x264_predict_4x4_init()用于初始化Intra4x4帧内预测汇编函数。该函数的定义位于common\predict.c,如下所示。//Intra4x4帧内预测汇编函数初始化
void x264_predict_4x4_init( int cpu, x264_predict_t pf[12] )
{
//9种Intra4x4预测方式
pf[I_PRED_4x4_V] = x264_predict_4x4_v_c;
pf[I_PRED_4x4_H] = x264_predict_4x4_h_c;
pf[I_PRED_4x4_DC] = x264_predict_4x4_dc_c;
pf[I_PRED_4x4_DDL] = x264_predict_4x4_ddl_c;
pf[I_PRED_4x4_DDR] = x264_predict_4x4_ddr_c;
pf[I_PRED_4x4_VR] = x264_predict_4x4_vr_c;
pf[I_PRED_4x4_HD] = x264_predict_4x4_hd_c;
pf[I_PRED_4x4_VL] = x264_predict_4x4_vl_c;
pf[I_PRED_4x4_HU] = x264_predict_4x4_hu_c;
//这些是?
pf[I_PRED_4x4_DC_LEFT]= x264_predict_4x4_dc_left_c;
pf[I_PRED_4x4_DC_TOP] = x264_predict_4x4_dc_top_c;
pf[I_PRED_4x4_DC_128] = x264_predict_4x4_dc_128_c;
#if HAVE_MMX
x264_predict_4x4_init_mmx( cpu, pf );
#endif
#if HAVE_ARMV6
x264_predict_4x4_init_arm( cpu, pf );
#endif
#if ARCH_AARCH64
x264_predict_4x4_init_aarch64( cpu, pf );
#endif
}
从源代码可看出,x264_predict_4x4_init()首先对帧内预测函数指针数组x264_predict_t[]中的元素赋值了C语言版本的函数x264_predict_4x4_v_c(),x264_predict_4x4_h_c(),x264_predict_4x4_dc_c(),x264_predict_4x4_p_c()等一系列函数(Intra4x4有9种,后面那几种是怎么回事?);然后会判断系统平台的特性,如果平台支持的话,会调用x264_predict_4x4_init_mmx(),x264_predict_4x4_init_arm()等给x264_predict_t[]中的元素赋值经过汇编优化的函数。作为例子,下文看一个Intra4x4的Vertical帧内预测模式的C语言函数。
相关知识简述
Intra4x4的帧内预测模式一共有9种。如下图所示。
x264_predict_4x4_v_c()
x264_predict_4x4_v_c()实现了Intra4x4的Vertical帧内预测方式。该函数的定义位于common\predict.c,如下所示。void x264_predict_4x4_v_c( pixel *src )
{
/*
* Vertical预测方式
* |X1 X2 X3 X4
* --+-----------
* |X1 X2 X3 X4
* |X1 X2 X3 X4
* |X1 X2 X3 X4
* |X1 X2 X3 X4
*
*/
/*
* 宏展开后的结果如下所示
* 注:重建宏块缓存fdec_buf一行的数据量为32Byte
*
* (((x264_union32_t*)(&src[(0)+(0)*32]))->i) =
* (((x264_union32_t*)(&src[(0)+(1)*32]))->i) =
* (((x264_union32_t*)(&src[(0)+(2)*32]))->i) =
* (((x264_union32_t*)(&src[(0)+(3)*32]))->i) = (((x264_union32_t*)(&src[(0)+(-1)*32]))->i);
*/
PREDICT_4x4_DC(SRC_X4(0,-1));
}
x264_predict_4x4_v_c()函数的函数体极其简单,只有一个宏定义“PREDICT_4x4_DC(SRC_X4(0,-1));”。如果把该宏展开后,可以看出它取了4x4块上面一行4个像素的值,然后分别赋值给4x4块的4行像素。
x264_pixel_init()
x264_pixel_init()初始化像素值计算相关的汇编函数(包括SAD、SATD、SSD等)。该函数的定义位于common\pixel.c,如下所示。/****************************************************************************
* x264_pixel_init:
****************************************************************************/
//SAD等和像素计算有关的函数
void x264_pixel_init( int cpu, x264_pixel_function_t *pixf )
{
memset( pixf, 0, sizeof(*pixf) );
//初始化2个函数-16x16,16x8
#define INIT2_NAME( name1, name2, cpu ) \
pixf->name1[PIXEL_16x16] = x264_pixel_##name2##_16x16##cpu;\
pixf->name1[PIXEL_16x8] = x264_pixel_##name2##_16x8##cpu;
//初始化4个函数-(16x16,16x8),8x16,8x8
#define INIT4_NAME( name1, name2, cpu ) \
INIT2_NAME( name1, name2, cpu ) \
pixf->name1[PIXEL_8x16] = x264_pixel_##name2##_8x16##cpu;\
pixf->name1[PIXEL_8x8] = x264_pixel_##name2##_8x8##cpu;
//初始化5个函数-(16x16,16x8,8x16,8x8),8x4
#define INIT5_NAME( name1, name2, cpu ) \
INIT4_NAME( name1, name2, cpu ) \
pixf->name1[PIXEL_8x4] = x264_pixel_##name2##_8x4##cpu;
//初始化6个函数-(16x16,16x8,8x16,8x8,8x4),4x8
#define INIT6_NAME( name1, name2, cpu ) \
INIT5_NAME( name1, name2, cpu ) \
pixf->name1[PIXEL_4x8] = x264_pixel_##name2##_4x8##cpu;
//初始化7个函数-(16x16,16x8,8x16,8x8,8x4,4x8),4x4
#define INIT7_NAME( name1, name2, cpu ) \
INIT6_NAME( name1, name2, cpu ) \
pixf->name1[PIXEL_4x4] = x264_pixel_##name2##_4x4##cpu;
#define INIT8_NAME( name1, name2, cpu ) \
INIT7_NAME( name1, name2, cpu ) \
pixf->name1[PIXEL_4x16] = x264_pixel_##name2##_4x16##cpu;
//重新起个名字
#define INIT2( name, cpu ) INIT2_NAME( name, name, cpu )
#define INIT4( name, cpu ) INIT4_NAME( name, name, cpu )
#define INIT5( name, cpu ) INIT5_NAME( name, name, cpu )
#define INIT6( name, cpu ) INIT6_NAME( name, name, cpu )
#define INIT7( name, cpu ) INIT7_NAME( name, name, cpu )
#define INIT8( name, cpu ) INIT8_NAME( name, name, cpu )
#define INIT_ADS( cpu ) \
pixf->ads[PIXEL_16x16] = x264_pixel_ads4##cpu;\
pixf->ads[PIXEL_16x8] = x264_pixel_ads2##cpu;\
pixf->ads[PIXEL_8x8] = x264_pixel_ads1##cpu;
//8个sad函数
INIT8( sad, );
INIT8_NAME( sad_aligned, sad, );
//7个sad函数-一次性计算3次
INIT7( sad_x3, );
//7个sad函数-一次性计算4次
INIT7( sad_x4, );
//8个ssd函数
//ssd可以用来计算PSNR
INIT8( ssd, );
//8个satd函数
//satd计算的是经过Hadamard变换后的值
INIT8( satd, );
//8个satd函数-一次性计算3次
INIT7( satd_x3, );
//8个satd函数-一次性计算4次
INIT7( satd_x4, );
INIT4( hadamard_ac, );
INIT_ADS( );
pixf->sa8d[PIXEL_16x16] = x264_pixel_sa8d_16x16;
pixf->sa8d[PIXEL_8x8] = x264_pixel_sa8d_8x8;
pixf->var[PIXEL_16x16] = x264_pixel_var_16x16;
pixf->var[PIXEL_8x16] = x264_pixel_var_8x16;
pixf->var[PIXEL_8x8] = x264_pixel_var_8x8;
pixf->var2[PIXEL_8x16] = x264_pixel_var2_8x16;
pixf->var2[PIXEL_8x8] = x264_pixel_var2_8x8;
//计算UV的
pixf->ssd_nv12_core = pixel_ssd_nv12_core;
//计算SSIM
pixf->ssim_4x4x2_core = ssim_4x4x2_core;
pixf->ssim_end4 = ssim_end4;
pixf->vsad = pixel_vsad;
pixf->asd8 = pixel_asd8;
pixf->intra_sad_x3_4x4 = x264_intra_sad_x3_4x4;
pixf->intra_satd_x3_4x4 = x264_intra_satd_x3_4x4;
pixf->intra_sad_x3_8x8 = x264_intra_sad_x3_8x8;
pixf->intra_sa8d_x3_8x8 = x264_intra_sa8d_x3_8x8;
pixf->intra_sad_x3_8x8c = x264_intra_sad_x3_8x8c;
pixf->intra_satd_x3_8x8c = x264_intra_satd_x3_8x8c;
pixf->intra_sad_x3_8x16c = x264_intra_sad_x3_8x16c;
pixf->intra_satd_x3_8x16c = x264_intra_satd_x3_8x16c;
pixf->intra_sad_x3_16x16 = x264_intra_sad_x3_16x16;
pixf->intra_satd_x3_16x16 = x264_intra_satd_x3_16x16;
//后面的初始化基本上都是汇编优化过的函数
#if HIGH_BIT_DEPTH
#if HAVE_MMX
if( cpu&X264_CPU_MMX2 )
{
INIT7( sad, _mmx2 );
INIT7_NAME( sad_aligned, sad, _mmx2 );
INIT7( sad_x3, _mmx2 );
INIT7( sad_x4, _mmx2 );
INIT8( satd, _mmx2 );
INIT7( satd_x3, _mmx2 );
INIT7( satd_x4, _mmx2 );
INIT4( hadamard_ac, _mmx2 );
INIT8( ssd, _mmx2 );
INIT_ADS( _mmx2 );
pixf->ssd_nv12_core = x264_pixel_ssd_nv12_core_mmx2;
pixf->var[PIXEL_16x16] = x264_pixel_var_16x16_mmx2;
pixf->var[PIXEL_8x8] = x264_pixel_var_8x8_mmx2;
#if ARCH_X86
pixf->var2[PIXEL_8x8] = x264_pixel_var2_8x8_mmx2;
pixf->var2[PIXEL_8x16] = x264_pixel_var2_8x16_mmx2;
#endif
pixf->intra_sad_x3_4x4 = x264_intra_sad_x3_4x4_mmx2;
pixf->intra_satd_x3_4x4 = x264_intra_satd_x3_4x4_mmx2;
pixf->intra_sad_x3_8x8 = x264_intra_sad_x3_8x8_mmx2;
pixf->intra_sad_x3_8x8c = x264_intra_sad_x3_8x8c_mmx2;
pixf->intra_satd_x3_8x8c = x264_intra_satd_x3_8x8c_mmx2;
pixf->intra_sad_x3_8x16c = x264_intra_sad_x3_8x16c_mmx2;
pixf->intra_satd_x3_8x16c = x264_intra_satd_x3_8x16c_mmx2;
pixf->intra_sad_x3_16x16 = x264_intra_sad_x3_16x16_mmx2;
pixf->intra_satd_x3_16x16 = x264_intra_satd_x3_16x16_mmx2;
}
if( cpu&X264_CPU_SSE2 )
{
INIT4_NAME( sad_aligned, sad, _sse2_aligned );
INIT5( ssd, _sse2 );
INIT6( satd, _sse2 );
pixf->satd[PIXEL_4x16] = x264_pixel_satd_4x16_sse2;
pixf->sa8d[PIXEL_16x16] = x264_pixel_sa8d_16x16_sse2;
pixf->sa8d[PIXEL_8x8] = x264_pixel_sa8d_8x8_sse2;
#if ARCH_X86_64
pixf->intra_sa8d_x3_8x8 = x264_intra_sa8d_x3_8x8_sse2;
pixf->sa8d_satd[PIXEL_16x16] = x264_pixel_sa8d_satd_16x16_sse2;
#endif
pixf->intra_sad_x3_4x4 = x264_intra_sad_x3_4x4_sse2;
pixf->ssd_nv12_core = x264_pixel_ssd_nv12_core_sse2;
pixf->ssim_4x4x2_core = x264_pixel_ssim_4x4x2_core_sse2;
pixf->ssim_end4 = x264_pixel_ssim_end4_sse2;
pixf->var[PIXEL_16x16] = x264_pixel_var_16x16_sse2;
pixf->var[PIXEL_8x8] = x264_pixel_var_8x8_sse2;
pixf->var2[PIXEL_8x8] = x264_pixel_var2_8x8_sse2;
pixf->var2[PIXEL_8x16] = x264_pixel_var2_8x16_sse2;
pixf->intra_sad_x3_8x8 = x264_intra_sad_x3_8x8_sse2;
}
//此处省略大量的X86、ARM等平台的汇编函数初始化代码
}
x264_pixel_init()的源代码非常的长,主要原因在于它把C语言版本的函数以及各种平台的汇编函数都写到一块了(不知道现在最新的版本是不是还是这样)。x264_pixel_init()包含了大量和像素计算有关的函数,包括SAD、SATD、SSD、SSIM等等。它的输入参数x264_pixel_function_t是一个结构体,其中包含了各种像素计算的函数接口。x264_pixel_function_t的定义如下所示。
typedef struct
{
x264_pixel_cmp_t sad[8];
x264_pixel_cmp_t ssd[8];
x264_pixel_cmp_t satd[8];
x264_pixel_cmp_t ssim[7];
x264_pixel_cmp_t sa8d[4];
x264_pixel_cmp_t mbcmp[8]; /* either satd or sad for subpel refine and mode decision */
x264_pixel_cmp_t mbcmp_unaligned[8]; /* unaligned mbcmp for subpel */
x264_pixel_cmp_t fpelcmp[8]; /* either satd or sad for fullpel motion search */
x264_pixel_cmp_x3_t fpelcmp_x3[7];
x264_pixel_cmp_x4_t fpelcmp_x4[7];
x264_pixel_cmp_t sad_aligned[8]; /* Aligned SAD for mbcmp */
int (*vsad)( pixel *, intptr_t, int );
int (*asd8)( pixel *pix1, intptr_t stride1, pixel *pix2, intptr_t stride2, int height );
uint64_t (*sa8d_satd[1])( pixel *pix1, intptr_t stride1, pixel *pix2, intptr_t stride2 );
uint64_t (*var[4])( pixel *pix, intptr_t stride );
int (*var2[4])( pixel *pix1, intptr_t stride1,
pixel *pix2, intptr_t stride2, int *ssd );
uint64_t (*hadamard_ac[4])( pixel *pix, intptr_t stride );
void (*ssd_nv12_core)( pixel *pixuv1, intptr_t stride1,
pixel *pixuv2, intptr_t stride2, int width, int height,
uint64_t *ssd_u, uint64_t *ssd_v );
void (*ssim_4x4x2_core)( const pixel *pix1, intptr_t stride1,
const pixel *pix2, intptr_t stride2, int sums[2][4] );
float (*ssim_end4)( int sum0[5][4], int sum1[5][4], int width );
/* multiple parallel calls to cmp. */
x264_pixel_cmp_x3_t sad_x3[7];
x264_pixel_cmp_x4_t sad_x4[7];
x264_pixel_cmp_x3_t satd_x3[7];
x264_pixel_cmp_x4_t satd_x4[7];
/* abs-diff-sum for successive elimination.
* may round width up to a multiple of 16. */
int (*ads[7])( int enc_dc[4], uint16_t *sums, int delta,
uint16_t *cost_mvx, int16_t *mvs, int width, int thresh );
/* calculate satd or sad of V, H, and DC modes. */
void (*intra_mbcmp_x3_16x16)( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_satd_x3_16x16) ( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_sad_x3_16x16) ( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_mbcmp_x3_4x4) ( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_satd_x3_4x4) ( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_sad_x3_4x4) ( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_mbcmp_x3_chroma)( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_satd_x3_chroma) ( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_sad_x3_chroma) ( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_mbcmp_x3_8x16c) ( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_satd_x3_8x16c) ( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_sad_x3_8x16c) ( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_mbcmp_x3_8x8c) ( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_satd_x3_8x8c) ( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_sad_x3_8x8c) ( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_mbcmp_x3_8x8) ( pixel *fenc, pixel edge[36], int res[3] );
void (*intra_sa8d_x3_8x8) ( pixel *fenc, pixel edge[36], int res[3] );
void (*intra_sad_x3_8x8) ( pixel *fenc, pixel edge[36], int res[3] );
/* find minimum satd or sad of all modes, and set fdec.
* may be NULL, in which case just use pred+satd instead. */
int (*intra_mbcmp_x9_4x4)( pixel *fenc, pixel *fdec, uint16_t *bitcosts );
int (*intra_satd_x9_4x4) ( pixel *fenc, pixel *fdec, uint16_t *bitcosts );
int (*intra_sad_x9_4x4) ( pixel *fenc, pixel *fdec, uint16_t *bitcosts );
int (*intra_mbcmp_x9_8x8)( pixel *fenc, pixel *fdec, pixel edge[36], uint16_t *bitcosts, uint16_t *satds );
int (*intra_sa8d_x9_8x8) ( pixel *fenc, pixel *fdec, pixel edge[36], uint16_t *bitcosts, uint16_t *satds );
int (*intra_sad_x9_8x8) ( pixel *fenc, pixel *fdec, pixel edge[36], uint16_t *bitcosts, uint16_t *satds );
} x264_pixel_function_t;在x264_pixel_init()中定义了好几个宏,用于给x264_pixel_function_t结构体中的函数接口赋值。例如“INIT8( sad, )”用于给x264_pixel_function_t中的sad[8]赋值。该宏展开后的代码如下。
pixf->sad[PIXEL_16x16] = x264_pixel_sad_16x16; pixf->sad[PIXEL_16x8] = x264_pixel_sad_16x8; pixf->sad[PIXEL_8x16] = x264_pixel_sad_8x16; pixf->sad[PIXEL_8x8] = x264_pixel_sad_8x8; pixf->sad[PIXEL_8x4] = x264_pixel_sad_8x4; pixf->sad[PIXEL_4x8] = x264_pixel_sad_4x8; pixf->sad[PIXEL_4x4] = x264_pixel_sad_4x4; pixf->sad[PIXEL_4x16] = x264_pixel_sad_4x16;“INIT8( ssd, )” 用于给x264_pixel_function_t中的ssd[8]赋值。该宏展开后的代码如下。
pixf->ssd[PIXEL_16x16] = x264_pixel_ssd_16x16; pixf->ssd[PIXEL_16x8] = x264_pixel_ssd_16x8; pixf->ssd[PIXEL_8x16] = x264_pixel_ssd_8x16; pixf->ssd[PIXEL_8x8] = x264_pixel_ssd_8x8; pixf->ssd[PIXEL_8x4] = x264_pixel_ssd_8x4; pixf->ssd[PIXEL_4x8] = x264_pixel_ssd_4x8; pixf->ssd[PIXEL_4x4] = x264_pixel_ssd_4x4; pixf->ssd[PIXEL_4x16] = x264_pixel_ssd_4x16;“INIT8( satd, )” 用于给x264_pixel_function_t中的satd[8]赋值。该宏展开后的代码如下。
pixf->satd[PIXEL_16x16] = x264_pixel_satd_16x16; pixf->satd[PIXEL_16x8] = x264_pixel_satd_16x8; pixf->satd[PIXEL_8x16] = x264_pixel_satd_8x16; pixf->satd[PIXEL_8x8] = x264_pixel_satd_8x8; pixf->satd[PIXEL_8x4] = x264_pixel_satd_8x4; pixf->satd[PIXEL_4x8] = x264_pixel_satd_4x8; pixf->satd[PIXEL_4x4] = x264_pixel_satd_4x4; pixf->satd[PIXEL_4x16] = x264_pixel_satd_4x16;下文打算分别记录SAD、SSD和SATD计算的函数x264_pixel_sad_4x4(),x264_pixel_ssd_4x4(),和x264_pixel_satd_4x4()。此外再记录一个一次性“批量”计算4个点的函数x264_pixel_sad_x4_4x4()。
相关知识简述
简单记录几个像素计算中的概念。SAD和SATD主要用于帧内预测模式以及帧间预测模式的判断。有关SAD、SATD、SSD的定义如下:SAD(Sum of Absolute Difference)也可以称为SAE(Sum of Absolute Error),即绝对误差和。它的计算方法就是求出两个像素块对应像素点的差值,将这些差值分别求绝对值之后再进行累加。
SATD(Sum of Absolute Transformed Difference)即Hadamard变换后再绝对值求和。它和SAD的区别在于多了一个“变换”。
SSD(Sum of Squared Difference)也可以称为SSE(Sum of Squared Error),即差值的平方和。它和SAD的区别在于多了一个“平方”。
H.264中使用SAD和SATD进行宏块预测模式的判断。早期的编码器使用SAD进行计算,近期的编码器多使用SATD进行计算。为什么使用SATD而不使用SAD呢?关键原因在于编码之后码流的大小是和图像块DCT变换后频域信息紧密相关的,而和变换前的时域信息关联性小一些。SAD只能反应时域信息;SATD却可以反映频域信息,而且计算复杂度也低于DCT变换,因此是比较合适的模式选择的依据。
使用SAD进行模式选择的示例如下所示。下面这张图代表了一个普通的Intra16x16的宏块的像素。它的下方包含了使用Vertical,Horizontal,DC和Plane四种帧内预测模式预测的像素。通过计算可以得到这几种预测像素和原始像素之间的SAD(SAE)分别为3985,5097,4991,2539。由于Plane模式的SAD取值最小,由此可以断定Plane模式对于这个宏块来说是最好的帧内预测模式。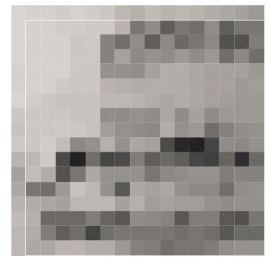

x264_pixel_sad_4x4()
x264_pixel_sad_4x4()用于计算4x4块的SAD。该函数的定义位于common\pixel.c,如下所示。 static int x264_pixel_sad_4x4( pixel *pix1, intptr_t i_stride_pix1,
pixel *pix2, intptr_t i_stride_pix2 )
{
int i_sum = 0;
for( int y = 0; y < 4; y++ ) //4个像素
{
for( int x = 0; x < 4; x++ ) //4个像素
{
i_sum += abs( pix1[x] - pix2[x] );//相减之后求绝对值,然后累加
}
pix1 += i_stride_pix1;
pix2 += i_stride_pix2;
}
return i_sum;
}可以看出x264_pixel_sad_4x4()将两个4x4图像块对应点相减之后,调用abs()求出绝对值,然后累加到i_sum变量上。
x264_pixel_sad_x4_4x4()
x264_pixel_sad_4x4()用于计算4个4x4块的SAD。该函数的定义位于common\pixel.c,如下所示。 static void x264_pixel_sad_x4_4x4( pixel *fenc, pixel *pix0, pixel *pix1,pixel *pix2, pixel *pix3,
intptr_t i_stride, int scores[4] )
{
scores[0] = x264_pixel_sad_4x4( fenc, 16, pix0, i_stride );
scores[1] = x264_pixel_sad_4x4( fenc, 16, pix1, i_stride );
scores[2] = x264_pixel_sad_4x4( fenc, 16, pix2, i_stride );
scores[3] = x264_pixel_sad_4x4( fenc, 16, pix3, i_stride );
}可以看出,x264_pixel_sad_4x4()计算了起始点在pix0,pix1,pix2,pix3四个4x4的图像块和fenc之间的SAD,并将结果存储于scores[4]数组中。
x264_pixel_ssd_4x4()
x264_pixel_ssd_4x4()用于计算4x4块的SSD。该函数的定义位于common\pixel.c,如下所示。 static int x264_pixel_ssd_4x4( pixel *pix1, intptr_t i_stride_pix1,
pixel *pix2, intptr_t i_stride_pix2 )
{
int i_sum = 0;
for( int y = 0; y < 4; y++ ) //4个像素
{
for( int x = 0; x < 4; x++ ) //4个像素
{
int d = pix1[x] - pix2[x]; //相减
i_sum += d*d; //平方之后,累加
}
pix1 += i_stride_pix1;
pix2 += i_stride_pix2;
}
return i_sum;
}可以看出x264_pixel_ssd_4x4()将两个4x4图像块对应点相减之后,取了平方值,然后累加到i_sum变量上。
x264_pixel_satd_4x4()
x264_pixel_satd_4x4()用于计算4x4块的SATD。该函数的定义位于common\pixel.c,如下所示。//SAD(Sum of Absolute Difference)=SAE(Sum of Absolute Error)即绝对误差和
//SATD(Sum of Absolute Transformed Difference)即hadamard变换后再绝对值求和
//
//为什么帧内模式选择要用SATD?
//SAD即绝对误差和,仅反映残差时域差异,影响PSNR值,不能有效反映码流的大小。
//SATD即将残差经哈德曼变换的4x4块的预测残差绝对值总和,可以将其看作简单的时频变换,其值在一定程度上可以反映生成码流的大小。
//4x4的SATD
static NOINLINE int x264_pixel_satd_4x4( pixel *pix1, intptr_t i_pix1, pixel *pix2, intptr_t i_pix2 )
{
sum2_t tmp[4][2];
sum2_t a0, a1, a2, a3, b0, b1;
sum2_t sum = 0;
for( int i = 0; i < 4; i++, pix1 += i_pix1, pix2 += i_pix2 )
{
a0 = pix1[0] - pix2[0];
a1 = pix1[1] - pix2[1];
b0 = (a0+a1) + ((a0-a1)<<BITS_PER_SUM);
a2 = pix1[2] - pix2[2];
a3 = pix1[3] - pix2[3];
b1 = (a2+a3) + ((a2-a3)<<BITS_PER_SUM);
tmp[i][0] = b0 + b1;
tmp[i][1] = b0 - b1;
}
for( int i = 0; i < 2; i++ )
{
HADAMARD4( a0, a1, a2, a3, tmp[0][i], tmp[1][i], tmp[2][i], tmp[3][i] );
a0 = abs2(a0) + abs2(a1) + abs2(a2) + abs2(a3);
sum += ((sum_t)a0) + (a0>>BITS_PER_SUM);
}
return sum >> 1;
}
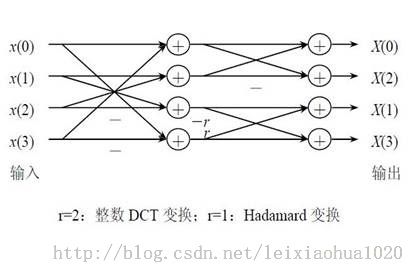
有关x264_pixel_satd_4x4()中的Hadamard变换在下面的DCT变换中再进行分析。可以看出该函数调用了一个宏HADAMARD4()用于Hadamard变换的计算,并最终将两个像素块Hadamard变换后对应元素求差的绝对值之后,累加到sum变量上。
x264_dct_init()
x264_dct_init()用于初始化DCT变换和DCT反变换相关的汇编函数。该函数的定义位于common\dct.c,如下所示。/****************************************************************************
* x264_dct_init:
****************************************************************************/
void x264_dct_init( int cpu, x264_dct_function_t *dctf )
{
//C语言版本
//4x4DCT变换
dctf->sub4x4_dct = sub4x4_dct;
dctf->add4x4_idct = add4x4_idct;
//8x8块:分解成4个4x4DCT变换,调用4次sub4x4_dct()
dctf->sub8x8_dct = sub8x8_dct;
dctf->sub8x8_dct_dc = sub8x8_dct_dc;
dctf->add8x8_idct = add8x8_idct;
dctf->add8x8_idct_dc = add8x8_idct_dc;
dctf->sub8x16_dct_dc = sub8x16_dct_dc;
//16x16块:分解成4个8x8块,调用4次sub8x8_dct()
//实际上每个sub8x8_dct()又分解成4个4x4DCT变换,调用4次sub4x4_dct()
dctf->sub16x16_dct = sub16x16_dct;
dctf->add16x16_idct = add16x16_idct;
dctf->add16x16_idct_dc = add16x16_idct_dc;
//8x8DCT,注意:后缀是_dct8
dctf->sub8x8_dct8 = sub8x8_dct8;
dctf->add8x8_idct8 = add8x8_idct8;
dctf->sub16x16_dct8 = sub16x16_dct8;
dctf->add16x16_idct8 = add16x16_idct8;
//Hadamard变换
dctf->dct4x4dc = dct4x4dc;
dctf->idct4x4dc = idct4x4dc;
dctf->dct2x4dc = dct2x4dc;
#if HIGH_BIT_DEPTH
#if HAVE_MMX
if( cpu&X264_CPU_MMX )
{
dctf->sub4x4_dct = x264_sub4x4_dct_mmx;
dctf->sub8x8_dct = x264_sub8x8_dct_mmx;
dctf->sub16x16_dct = x264_sub16x16_dct_mmx;
}
if( cpu&X264_CPU_SSE2 )
{
dctf->add4x4_idct = x264_add4x4_idct_sse2;
dctf->dct4x4dc = x264_dct4x4dc_sse2;
dctf->idct4x4dc = x264_idct4x4dc_sse2;
dctf->sub8x8_dct8 = x264_sub8x8_dct8_sse2;
dctf->sub16x16_dct8 = x264_sub16x16_dct8_sse2;
dctf->add8x8_idct = x264_add8x8_idct_sse2;
dctf->add16x16_idct = x264_add16x16_idct_sse2;
dctf->add8x8_idct8 = x264_add8x8_idct8_sse2;
dctf->add16x16_idct8 = x264_add16x16_idct8_sse2;
dctf->sub8x8_dct_dc = x264_sub8x8_dct_dc_sse2;
dctf->add8x8_idct_dc = x264_add8x8_idct_dc_sse2;
dctf->sub8x16_dct_dc = x264_sub8x16_dct_dc_sse2;
dctf->add16x16_idct_dc= x264_add16x16_idct_dc_sse2;
}
if( cpu&X264_CPU_SSE4 )
{
dctf->sub8x8_dct8 = x264_sub8x8_dct8_sse4;
dctf->sub16x16_dct8 = x264_sub16x16_dct8_sse4;
}
if( cpu&X264_CPU_AVX )
{
dctf->add4x4_idct = x264_add4x4_idct_avx;
dctf->dct4x4dc = x264_dct4x4dc_avx;
dctf->idct4x4dc = x264_idct4x4dc_avx;
dctf->sub8x8_dct8 = x264_sub8x8_dct8_avx;
dctf->sub16x16_dct8 = x264_sub16x16_dct8_avx;
dctf->add8x8_idct = x264_add8x8_idct_avx;
dctf->add16x16_idct = x264_add16x16_idct_avx;
dctf->add8x8_idct8 = x264_add8x8_idct8_avx;
dctf->add16x16_idct8 = x264_add16x16_idct8_avx;
dctf->add8x8_idct_dc = x264_add8x8_idct_dc_avx;
dctf->sub8x16_dct_dc = x264_sub8x16_dct_dc_avx;
dctf->add16x16_idct_dc= x264_add16x16_idct_dc_avx;
}
#endif // HAVE_MMX
#else // !HIGH_BIT_DEPTH
//MMX版本
#if HAVE_MMX
if( cpu&X264_CPU_MMX )
{
dctf->sub4x4_dct = x264_sub4x4_dct_mmx;
dctf->add4x4_idct = x264_add4x4_idct_mmx;
dctf->idct4x4dc = x264_idct4x4dc_mmx;
dctf->sub8x8_dct_dc = x264_sub8x8_dct_dc_mmx2;
//此处省略大量的X86、ARM等平台的汇编函数初始化代码
}
从源代码可以看出,x264_dct_init()初始化了一系列的DCT变换的函数,这些DCT函数名称有如下规律:
(1)DCT函数名称前面有“sub”,代表对两块像素相减得到残差之后,再进行DCT变换。
(2)DCT反变换函数名称前面有“add”,代表将DCT反变换之后的残差数据叠加到预测数据上。
(3)以“dct8”为结尾的函数使用了8x8DCT,其余函数是用的都是4x4DCT。
x264_dct_init()的输入参数x264_dct_function_t是一个结构体,其中包含了各种DCT函数的接口。x264_dct_function_t的定义如下所示。
typedef struct
{
// pix1 stride = FENC_STRIDE
// pix2 stride = FDEC_STRIDE
// p_dst stride = FDEC_STRIDE
void (*sub4x4_dct) ( dctcoef dct[16], pixel *pix1, pixel *pix2 );
void (*add4x4_idct) ( pixel *p_dst, dctcoef dct[16] );
void (*sub8x8_dct) ( dctcoef dct[4][16], pixel *pix1, pixel *pix2 );
void (*sub8x8_dct_dc)( dctcoef dct[4], pixel *pix1, pixel *pix2 );
void (*add8x8_idct) ( pixel *p_dst, dctcoef dct[4][16] );
void (*add8x8_idct_dc) ( pixel *p_dst, dctcoef dct[4] );
void (*sub8x16_dct_dc)( dctcoef dct[8], pixel *pix1, pixel *pix2 );
void (*sub16x16_dct) ( dctcoef dct[16][16], pixel *pix1, pixel *pix2 );
void (*add16x16_idct)( pixel *p_dst, dctcoef dct[16][16] );
void (*add16x16_idct_dc) ( pixel *p_dst, dctcoef dct[16] );
void (*sub8x8_dct8) ( dctcoef dct[64], pixel *pix1, pixel *pix2 );
void (*add8x8_idct8) ( pixel *p_dst, dctcoef dct[64] );
void (*sub16x16_dct8) ( dctcoef dct[4][64], pixel *pix1, pixel *pix2 );
void (*add16x16_idct8)( pixel *p_dst, dctcoef dct[4][64] );
void (*dct4x4dc) ( dctcoef d[16] );
void (*idct4x4dc)( dctcoef d[16] );
void (*dct2x4dc)( dctcoef dct[8], dctcoef dct4x4[8][16] );
} x264_dct_function_t;
x264_dct_init()的工作就是对x264_dct_function_t中的函数指针进行赋值。由于DCT函数很多,不便于一一研究,下文仅举例分析几个典型的4x4DCT函数:4x4DCT变换函数sub4x4_dct(),4x4IDCT变换函数add4x4_idct(),8x8块的4x4DCT变换函数sub8x8_dct(),16x16块的4x4DCT变换函数sub16x16_dct(),4x4Hadamard变换函数dct4x4dc()。
相关知识简述
简单记录一下DCT相关的知识。DCT变换的核心理念就是把图像的低频信息(对应大面积平坦区域)变换到系数矩阵的左上角,而把高频信息变换到系数矩阵的右下角,这样就可以在压缩的时候(量化)去除掉人眼不敏感的高频信息(位于矩阵右下角的系数)从而达到压缩数据的目的。二维8x8DCT变换常见的示意图如下所示。

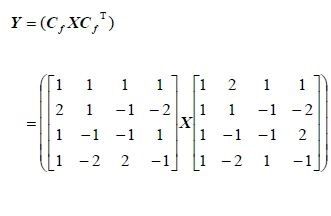
4x4整数DCT变换的公式如下所示。


sub4x4_dct()
sub4x4_dct()可以将两块4x4的图像相减求残差后,进行DCT变换。该函数的定义位于common\dct.c,如下所示。/*
* 求残差用
* 注意求的是一个“方块”形像素
*
* 参数的含义如下:
* diff:输出的残差数据
* i_size:方块的大小
* pix1:输入数据1
* i_pix1:输入数据1一行像素大小(stride)
* pix2:输入数据2
* i_pix2:输入数据2一行像素大小(stride)
*
*/
static inline void pixel_sub_wxh( dctcoef *diff, int i_size,
pixel *pix1, int i_pix1, pixel *pix2, int i_pix2 )
{
for( int y = 0; y < i_size; y++ )
{
for( int x = 0; x < i_size; x++ )
diff[x + y*i_size] = pix1[x] - pix2[x];//求残差
pix1 += i_pix1;//前进到下一行
pix2 += i_pix2;
}
}
//4x4DCT变换
//注意首先获取pix1和pix2两块数据的残差,然后再进行变换
//返回dct[16]
static void sub4x4_dct( dctcoef dct[16], pixel *pix1, pixel *pix2 )
{
dctcoef d[16];
dctcoef tmp[16];
//获取残差数据,存入d[16]
//pix1一般为编码帧(enc)
//pix2一般为重建帧(dec)
pixel_sub_wxh( d, 4, pix1, FENC_STRIDE, pix2, FDEC_STRIDE );
//处理残差d[16]
//蝶形算法:横向4个像素
for( int i = 0; i < 4; i++ )
{
int s03 = d[i*4+0] + d[i*4+3];
int s12 = d[i*4+1] + d[i*4+2];
int d03 = d[i*4+0] - d[i*4+3];
int d12 = d[i*4+1] - d[i*4+2];
tmp[0*4+i] = s03 + s12;
tmp[1*4+i] = 2*d03 + d12;
tmp[2*4+i] = s03 - s12;
tmp[3*4+i] = d03 - 2*d12;
}
//蝶形算法:纵向
for( int i = 0; i < 4; i++ )
{
int s03 = tmp[i*4+0] + tmp[i*4+3];
int s12 = tmp[i*4+1] + tmp[i*4+2];
int d03 = tmp[i*4+0] - tmp[i*4+3];
int d12 = tmp[i*4+1] - tmp[i*4+2];
dct[i*4+0] = s03 + s12;
dct[i*4+1] = 2*d03 + d12;
dct[i*4+2] = s03 - s12;
dct[i*4+3] = d03 - 2*d12;
}
}
从源代码可以看出,sub4x4_dct()首先调用pixel_sub_wxh()求出两个输入图像块的残差,然后使用蝶形快速算法计算残差图像的DCT系数。
add4x4_idct()
add4x4_idct()可以将残差数据进行DCT反变换,并将变换后得到的残差像素数据叠加到预测数据上。该函数的定义位于common\dct.c,如下所示。//4x4DCT反变换(“add”代表叠加到已有的像素上)
static void add4x4_idct( pixel *p_dst, dctcoef dct[16] )
{
dctcoef d[16];
dctcoef tmp[16];
for( int i = 0; i < 4; i++ )
{
int s02 = dct[0*4+i] + dct[2*4+i];
int d02 = dct[0*4+i] - dct[2*4+i];
int s13 = dct[1*4+i] + (dct[3*4+i]>>1);
int d13 = (dct[1*4+i]>>1) - dct[3*4+i];
tmp[i*4+0] = s02 + s13;
tmp[i*4+1] = d02 + d13;
tmp[i*4+2] = d02 - d13;
tmp[i*4+3] = s02 - s13;
}
for( int i = 0; i < 4; i++ )
{
int s02 = tmp[0*4+i] + tmp[2*4+i];
int d02 = tmp[0*4+i] - tmp[2*4+i];
int s13 = tmp[1*4+i] + (tmp[3*4+i]>>1);
int d13 = (tmp[1*4+i]>>1) - tmp[3*4+i];
d[0*4+i] = ( s02 + s13 + 32 ) >> 6;
d[1*4+i] = ( d02 + d13 + 32 ) >> 6;
d[2*4+i] = ( d02 - d13 + 32 ) >> 6;
d[3*4+i] = ( s02 - s13 + 32 ) >> 6;
}
for( int y = 0; y < 4; y++ )
{
for( int x = 0; x < 4; x++ )
p_dst[x] = x264_clip_pixel( p_dst[x] + d[y*4+x] );
p_dst += FDEC_STRIDE;
}
}从源代码可以看出,add4x4_idct()首先采用快速蝶形算法对DCT系数进行DCT反变换后得到残差像素数据,然后再将残差数据叠加到p_dst指向的像素上。需要注意这里是“叠加”而不是“赋值”。
sub8x8_dct()
sub8x8_dct()可以将两块8x8的图像相减求残差后,进行4x4DCT变换。该函数的定义位于common\dct.c,如下所示。//8x8块:分解成4个4x4DCT变换,调用4次sub4x4_dct()
//返回dct[4][16]
static void sub8x8_dct( dctcoef dct[4][16], pixel *pix1, pixel *pix2 )
{
/*
* 8x8 宏块被划分为4个4x4子块
*
* +---+---+
* | 0 | 1 |
* +---+---+
* | 2 | 3 |
* +---+---+
*
*/
sub4x4_dct( dct[0], &pix1[0], &pix2[0] );
sub4x4_dct( dct[1], &pix1[4], &pix2[4] );
sub4x4_dct( dct[2], &pix1[4*FENC_STRIDE+0], &pix2[4*FDEC_STRIDE+0] );
sub4x4_dct( dct[3], &pix1[4*FENC_STRIDE+4], &pix2[4*FDEC_STRIDE+4] );
}从源代码可以看出, sub8x8_dct()将8x8的图像块分成4个4x4的图像块,分别调用了sub4x4_dct()。
sub16x16_dct()
sub16x16_dct()可以将两块16x16的图像相减求残差后,进行4x4DCT变换。该函数的定义位于common\dct.c,如下所示。//16x16块:分解成4个8x8的块做DCT变换,调用4次sub8x8_dct()
//返回dct[16][16]
static void sub16x16_dct( dctcoef dct[16][16], pixel *pix1, pixel *pix2 )
{
/*
* 16x16 宏块被划分为4个8x8子块
*
* +--------+--------+
* | | |
* | 0 | 1 |
* | | |
* +--------+--------+
* | | |
* | 2 | 3 |
* | | |
* +--------+--------+
*
*/
sub8x8_dct( &dct[ 0], &pix1[0], &pix2[0] ); //0
sub8x8_dct( &dct[ 4], &pix1[8], &pix2[8] ); //1
sub8x8_dct( &dct[ 8], &pix1[8*FENC_STRIDE+0], &pix2[8*FDEC_STRIDE+0] ); //2
sub8x8_dct( &dct[12], &pix1[8*FENC_STRIDE+8], &pix2[8*FDEC_STRIDE+8] ); //3
}从源代码可以看出, sub8x8_dct()将16x16的图像块分成4个8x8的图像块,分别调用了sub8x8_dct()。而sub8x8_dct()实际上又调用了4次sub4x4_dct()。所以可以得知,不论sub16x16_dct(),sub8x8_dct()还是sub4x4_dct(),本质都是进行4x4DCT。
dct4x4dc()
dct4x4dc()可以将输入的4x4图像块进行Hadamard变换。该函数的定义位于common\dct.c,如下所示。//Hadamard变换
static void dct4x4dc( dctcoef d[16] )
{
dctcoef tmp[16];
//蝶形算法:横向的4个像素
for( int i = 0; i < 4; i++ )
{
int s01 = d[i*4+0] + d[i*4+1];
int d01 = d[i*4+0] - d[i*4+1];
int s23 = d[i*4+2] + d[i*4+3];
int d23 = d[i*4+2] - d[i*4+3];
tmp[0*4+i] = s01 + s23;
tmp[1*4+i] = s01 - s23;
tmp[2*4+i] = d01 - d23;
tmp[3*4+i] = d01 + d23;
}
//蝶形算法:纵向
for( int i = 0; i < 4; i++ )
{
int s01 = tmp[i*4+0] + tmp[i*4+1];
int d01 = tmp[i*4+0] - tmp[i*4+1];
int s23 = tmp[i*4+2] + tmp[i*4+3];
int d23 = tmp[i*4+2] - tmp[i*4+3];
d[i*4+0] = ( s01 + s23 + 1 ) >> 1;
d[i*4+1] = ( s01 - s23 + 1 ) >> 1;
d[i*4+2] = ( d01 - d23 + 1 ) >> 1;
d[i*4+3] = ( d01 + d23 + 1 ) >> 1;
}
}从源代码可以看出,dct4x4dc()实现了Hadamard快速蝶形算法。
x264_mc_init()
x264_mc_init()用于初始化运动补偿相关的汇编函数。该函数的定义位于common\mc.c,如下所示。//运动补偿
void x264_mc_init( int cpu, x264_mc_functions_t *pf, int cpu_independent )
{
//亮度运动补偿
pf->mc_luma = mc_luma;
//获得匹配块
pf->get_ref = get_ref;
pf->mc_chroma = mc_chroma;
//求平均
pf->avg[PIXEL_16x16]= pixel_avg_16x16;
pf->avg[PIXEL_16x8] = pixel_avg_16x8;
pf->avg[PIXEL_8x16] = pixel_avg_8x16;
pf->avg[PIXEL_8x8] = pixel_avg_8x8;
pf->avg[PIXEL_8x4] = pixel_avg_8x4;
pf->avg[PIXEL_4x16] = pixel_avg_4x16;
pf->avg[PIXEL_4x8] = pixel_avg_4x8;
pf->avg[PIXEL_4x4] = pixel_avg_4x4;
pf->avg[PIXEL_4x2] = pixel_avg_4x2;
pf->avg[PIXEL_2x8] = pixel_avg_2x8;
pf->avg[PIXEL_2x4] = pixel_avg_2x4;
pf->avg[PIXEL_2x2] = pixel_avg_2x2;
//加权相关
pf->weight = x264_mc_weight_wtab;
pf->offsetadd = x264_mc_weight_wtab;
pf->offsetsub = x264_mc_weight_wtab;
pf->weight_cache = x264_weight_cache;
//赋值-只包含了方形的
pf->copy_16x16_unaligned = mc_copy_w16;
pf->copy[PIXEL_16x16] = mc_copy_w16;
pf->copy[PIXEL_8x8] = mc_copy_w8;
pf->copy[PIXEL_4x4] = mc_copy_w4;
pf->store_interleave_chroma = store_interleave_chroma;
pf->load_deinterleave_chroma_fenc = load_deinterleave_chroma_fenc;
pf->load_deinterleave_chroma_fdec = load_deinterleave_chroma_fdec;
//拷贝像素-不论像素块大小
pf->plane_copy = x264_plane_copy_c;
pf->plane_copy_interleave = x264_plane_copy_interleave_c;
pf->plane_copy_deinterleave = x264_plane_copy_deinterleave_c;
pf->plane_copy_deinterleave_rgb = x264_plane_copy_deinterleave_rgb_c;
pf->plane_copy_deinterleave_v210 = x264_plane_copy_deinterleave_v210_c;
//关键:半像素内插
pf->hpel_filter = hpel_filter;
//几个空函数
pf->prefetch_fenc_420 = prefetch_fenc_null;
pf->prefetch_fenc_422 = prefetch_fenc_null;
pf->prefetch_ref = prefetch_ref_null;
pf->memcpy_aligned = memcpy;
pf->memzero_aligned = memzero_aligned;
//降低分辨率-线性内插(不是半像素内插)
pf->frame_init_lowres_core = frame_init_lowres_core;
pf->integral_init4h = integral_init4h;
pf->integral_init8h = integral_init8h;
pf->integral_init4v = integral_init4v;
pf->integral_init8v = integral_init8v;
pf->mbtree_propagate_cost = mbtree_propagate_cost;
pf->mbtree_propagate_list = mbtree_propagate_list;
//各种汇编版本
#if HAVE_MMX
x264_mc_init_mmx( cpu, pf );
#endif
#if HAVE_ALTIVEC
if( cpu&X264_CPU_ALTIVEC )
x264_mc_altivec_init( pf );
#endif
#if HAVE_ARMV6
x264_mc_init_arm( cpu, pf );
#endif
#if ARCH_AARCH64
x264_mc_init_aarch64( cpu, pf );
#endif
if( cpu_independent )
{
pf->mbtree_propagate_cost = mbtree_propagate_cost;
pf->mbtree_propagate_list = mbtree_propagate_list;
}
}
从源代码可以看出,x264_mc_init()中包含了大量的像素内插、拷贝、求平均的函数。这些函数都是用于在H.264编码过程中进行运动估计和运动补偿的。x264_mc_init()的参数x264_mc_functions_t是一个结构体,其中包含了运动补偿函数相关的函数接口。x264_mc_functions_t的定义如下。
typedef struct
{
void (*mc_luma)( pixel *dst, intptr_t i_dst, pixel **src, intptr_t i_src,
int mvx, int mvy, int i_width, int i_height, const x264_weight_t *weight );
/* may round up the dimensions if they're not a power of 2 */
pixel* (*get_ref)( pixel *dst, intptr_t *i_dst, pixel **src, intptr_t i_src,
int mvx, int mvy, int i_width, int i_height, const x264_weight_t *weight );
/* mc_chroma may write up to 2 bytes of garbage to the right of dst,
* so it must be run from left to right. */
void (*mc_chroma)( pixel *dstu, pixel *dstv, intptr_t i_dst, pixel *src, intptr_t i_src,
int mvx, int mvy, int i_width, int i_height );
void (*avg[12])( pixel *dst, intptr_t dst_stride, pixel *src1, intptr_t src1_stride,
pixel *src2, intptr_t src2_stride, int i_weight );
/* only 16x16, 8x8, and 4x4 defined */
void (*copy[7])( pixel *dst, intptr_t dst_stride, pixel *src, intptr_t src_stride, int i_height );
void (*copy_16x16_unaligned)( pixel *dst, intptr_t dst_stride, pixel *src, intptr_t src_stride, int i_height );
void (*store_interleave_chroma)( pixel *dst, intptr_t i_dst, pixel *srcu, pixel *srcv, int height );
void (*load_deinterleave_chroma_fenc)( pixel *dst, pixel *src, intptr_t i_src, int height );
void (*load_deinterleave_chroma_fdec)( pixel *dst, pixel *src, intptr_t i_src, int height );
void (*plane_copy)( pixel *dst, intptr_t i_dst, pixel *src, intptr_t i_src, int w, int h );
void (*plane_copy_interleave)( pixel *dst, intptr_t i_dst, pixel *srcu, intptr_t i_srcu,
pixel *srcv, intptr_t i_srcv, int w, int h );
/* may write up to 15 pixels off the end of each plane */
void (*plane_copy_deinterleave)( pixel *dstu, intptr_t i_dstu, pixel *dstv, intptr_t i_dstv,
pixel *src, intptr_t i_src, int w, int h );
void (*plane_copy_deinterleave_rgb)( pixel *dsta, intptr_t i_dsta, pixel *dstb, intptr_t i_dstb,
pixel *dstc, intptr_t i_dstc, pixel *src, intptr_t i_src, int pw, int w, int h );
void (*plane_copy_deinterleave_v210)( pixel *dsty, intptr_t i_dsty,
pixel *dstc, intptr_t i_dstc,
uint32_t *src, intptr_t i_src, int w, int h );
void (*hpel_filter)( pixel *dsth, pixel *dstv, pixel *dstc, pixel *src,
intptr_t i_stride, int i_width, int i_height, int16_t *buf );
/* prefetch the next few macroblocks of fenc or fdec */
void (*prefetch_fenc) ( pixel *pix_y, intptr_t stride_y, pixel *pix_uv, intptr_t stride_uv, int mb_x );
void (*prefetch_fenc_420)( pixel *pix_y, intptr_t stride_y, pixel *pix_uv, intptr_t stride_uv, int mb_x );
void (*prefetch_fenc_422)( pixel *pix_y, intptr_t stride_y, pixel *pix_uv, intptr_t stride_uv, int mb_x );
/* prefetch the next few macroblocks of a hpel reference frame */
void (*prefetch_ref)( pixel *pix, intptr_t stride, int parity );
void *(*memcpy_aligned)( void *dst, const void *src, size_t n );
void (*memzero_aligned)( void *dst, size_t n );
/* successive elimination prefilter */
void (*integral_init4h)( uint16_t *sum, pixel *pix, intptr_t stride );
void (*integral_init8h)( uint16_t *sum, pixel *pix, intptr_t stride );
void (*integral_init4v)( uint16_t *sum8, uint16_t *sum4, intptr_t stride );
void (*integral_init8v)( uint16_t *sum8, intptr_t stride );
void (*frame_init_lowres_core)( pixel *src0, pixel *dst0, pixel *dsth, pixel *dstv, pixel *dstc,
intptr_t src_stride, intptr_t dst_stride, int width, int height );
weight_fn_t *weight;
weight_fn_t *offsetadd;
weight_fn_t *offsetsub;
void (*weight_cache)( x264_t *, x264_weight_t * );
void (*mbtree_propagate_cost)( int16_t *dst, uint16_t *propagate_in, uint16_t *intra_costs,
uint16_t *inter_costs, uint16_t *inv_qscales, float *fps_factor, int len );
void (*mbtree_propagate_list)( x264_t *h, uint16_t *ref_costs, int16_t (*mvs)[2],
int16_t *propagate_amount, uint16_t *lowres_costs,
int bipred_weight, int mb_y, int len, int list );
} x264_mc_functions_t;
x264_mc_init()的工作就是对x264_mc_functions_t中的函数指针进行赋值。由于运动估计和运动补偿在x264中属于相对复杂的环节,其中许多函数的作用很难三言两语表述出来,因此只举一个相对简单的例子——半像素内插函数hpel_filter()。
相关知识简述
简单记录一下半像素插值的知识。《H.264标准》中规定,运动估计为1/4像素精度。因此在H.264编码和解码的过程中,需要将画面中的像素进行插值——简单地说就是把原先的1个像素点拓展成4x4一共16个点。下图显示了H.264编码和解码过程中像素插值情况。可以看出原先的G点的右下方通过插值的方式产生了a、b、c、d等一共16个点。
(1)半像素内插。这一步通过6抽头滤波器获得5个半像素点。
(2)线性内插。这一步通过简单的线性内插获得剩余的1/4像素点。
图中半像素内插点为b、m、h、s、j五个点。半像素内插方法是对整像素点进行6 抽头滤波得出,滤波器的权重为(1/32, -5/32, 5/8, 5/8, -5/32, 1/32)。例如b的计算公式为:
b=round( (E - 5F + 20G + 20H - 5I + J ) / 32)
剩下几个半像素点的计算关系如下:m:由B、D、H、N、S、U计算
h:由A、C、G、M、R、T计算
s:由K、L、M、N、P、Q计算
j:由cc、dd、h、m、ee、ff计算。需要注意j点的运算量比较大,因为cc、dd、ee、ff都需要通过半像素内插方法进行计算。
在获得半像素点之后,就可以通过简单的线性内插获得1/4像素内插点了。1/4像素内插的方式如下图所示。例如图中a点的计算公式如下:
A=round( (G+b)/2 )
在这里有一点需要注意:位于4个角的e、g、p、r四个点并不是通过j点计算计算的,而是通过b、h、s、m四个半像素点计算的。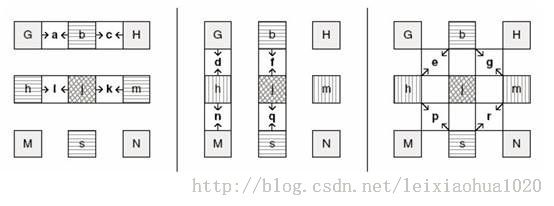
hpel_filter()
hpel_filter()用于进行半像素插值。该函数的定义位于common\mc.c,如下所示。//半像素插值公式
//b= (E - 5F + 20G + 20H - 5I + J)/32
// x
//d取1,水平滤波器;d取stride,垂直滤波器(这里没有除以32)
#define TAPFILTER(pix, d) ((pix)[x-2*d] + (pix)[x+3*d] - 5*((pix)[x-d] + (pix)[x+2*d]) + 20*((pix)[x] + (pix)[x+d]))
/*
* 半像素插值
* dsth:水平滤波得到的半像素点(aa,bb,b,s,gg,hh)
* dstv:垂直滤波的到的半像素点(cc,dd,h,m,ee,ff)
* dstc:“水平+垂直”滤波得到的位于4个像素中间的半像素点(j)
*
* 半像素插值示意图如下:
*
* A aa B
*
* C bb D
*
* E F G b H I J
*
* cc dd h j m ee ff
*
* K L M s N P Q
*
* R gg S
*
* T hh U
*
* 计算公式如下:
* b=round( (E - 5F + 20G + 20H - 5I + J ) / 32)
*
* 剩下几个半像素点的计算关系如下:
* m:由B、D、H、N、S、U计算
* h:由A、C、G、M、R、T计算
* s:由K、L、M、N、P、Q计算
* j:由cc、dd、h、m、ee、ff计算。需要注意j点的运算量比较大,因为cc、dd、ee、ff都需要通过半像素内插方法进行计算。
*
*/
static void hpel_filter( pixel *dsth, pixel *dstv, pixel *dstc, pixel *src,
intptr_t stride, int width, int height, int16_t *buf )
{
const int pad = (BIT_DEPTH > 9) ? (-10 * PIXEL_MAX) : 0;
/*
* 几种半像素点之间的位置关系
*
* X: 像素点
* H:水平滤波半像素点
* V:垂直滤波半像素点
* C: 中间位置半像素点
*
* X H X X X
*
* V C
*
* X X X X
*
*
*
* X X X X
*
*/
//一行一行处理
for( int y = 0; y < height; y++ )
{
//一个一个点处理
//每个整像素点都对应h,v,c三个半像素点
//v
for( int x = -2; x < width+3; x++ )//(aa,bb,b,s,gg,hh),结果存入buf
{
//垂直滤波半像素点
int v = TAPFILTER(src,stride);
dstv[x] = x264_clip_pixel( (v + 16) >> 5 );
/* transform v for storage in a 16-bit integer */
//这应该是给dstc计算使用的?
buf[x+2] = v + pad;
}
//c
for( int x = 0; x < width; x++ )
dstc[x] = x264_clip_pixel( (TAPFILTER(buf+2,1) - 32*pad + 512) >> 10 );//四个相邻像素中间的半像素点
//h
for( int x = 0; x < width; x++ )
dsth[x] = x264_clip_pixel( (TAPFILTER(src,1) + 16) >> 5 );//水平滤波半像素点
dsth += stride;
dstv += stride;
dstc += stride;
src += stride;
}
}
从源代码可以看出,hpel_filter()中包含了一个宏TAPFILTER()用来完成半像素点像素值的计算。在完成半像素插值工作后,dsth中存储的是经过水平插值后的半像素点,dstv中存储的是经过垂直插值后的半像素点,dstc中存储的是位于4个相邻像素点中间位置的半像素点。这三块内存中的点的位置关系如下图所示(灰色的点是整像素点)。

x264_quant_init()
x264_quant_init()初始化量化和反量化相关的汇编函数。该函数的定义位于common\quant.c,如下所示。//量化
void x264_quant_init( x264_t *h, int cpu, x264_quant_function_t *pf )
{
//这个好像是针对8x8DCT的
pf->quant_8x8 = quant_8x8;
//量化4x4=16个
pf->quant_4x4 = quant_4x4;
//注意:处理4个4x4的块
pf->quant_4x4x4 = quant_4x4x4;
//Intra16x16中,16个DC系数Hadamard变换后对的它们量化
pf->quant_4x4_dc = quant_4x4_dc;
pf->quant_2x2_dc = quant_2x2_dc;
//反量化4x4=16个
pf->dequant_4x4 = dequant_4x4;
pf->dequant_4x4_dc = dequant_4x4_dc;
pf->dequant_8x8 = dequant_8x8;
pf->idct_dequant_2x4_dc = idct_dequant_2x4_dc;
pf->idct_dequant_2x4_dconly = idct_dequant_2x4_dconly;
pf->optimize_chroma_2x2_dc = optimize_chroma_2x2_dc;
pf->optimize_chroma_2x4_dc = optimize_chroma_2x4_dc;
pf->denoise_dct = x264_denoise_dct;
pf->decimate_score15 = x264_decimate_score15;
pf->decimate_score16 = x264_decimate_score16;
pf->decimate_score64 = x264_decimate_score64;
pf->coeff_last4 = x264_coeff_last4;
pf->coeff_last8 = x264_coeff_last8;
pf->coeff_last[ DCT_LUMA_AC] = x264_coeff_last15;
pf->coeff_last[ DCT_LUMA_4x4] = x264_coeff_last16;
pf->coeff_last[ DCT_LUMA_8x8] = x264_coeff_last64;
pf->coeff_level_run4 = x264_coeff_level_run4;
pf->coeff_level_run8 = x264_coeff_level_run8;
pf->coeff_level_run[ DCT_LUMA_AC] = x264_coeff_level_run15;
pf->coeff_level_run[ DCT_LUMA_4x4] = x264_coeff_level_run16;
#if HIGH_BIT_DEPTH
#if HAVE_MMX
INIT_TRELLIS( sse2 );
if( cpu&X264_CPU_MMX2 )
{
#if ARCH_X86
pf->denoise_dct = x264_denoise_dct_mmx;
pf->decimate_score15 = x264_decimate_score15_mmx2;
pf->decimate_score16 = x264_decimate_score16_mmx2;
pf->decimate_score64 = x264_decimate_score64_mmx2;
pf->coeff_last8 = x264_coeff_last8_mmx2;
pf->coeff_last[ DCT_LUMA_AC] = x264_coeff_last15_mmx2;
pf->coeff_last[ DCT_LUMA_4x4] = x264_coeff_last16_mmx2;
pf->coeff_last[ DCT_LUMA_8x8] = x264_coeff_last64_mmx2;
pf->coeff_level_run8 = x264_coeff_level_run8_mmx2;
pf->coeff_level_run[ DCT_LUMA_AC] = x264_coeff_level_run15_mmx2;
pf->coeff_level_run[ DCT_LUMA_4x4] = x264_coeff_level_run16_mmx2;
#endif
pf->coeff_last4 = x264_coeff_last4_mmx2;
pf->coeff_level_run4 = x264_coeff_level_run4_mmx2;
if( cpu&X264_CPU_LZCNT )
pf->coeff_level_run4 = x264_coeff_level_run4_mmx2_lzcnt;
}
//此处省略大量的X86、ARM等平台的汇编函数初始化代码
}
从源代码可以看出,x264_quant_init ()初始化了一系列的量化相关的函数。它的输入参数x264_quant_function_t是一个结构体,其中包含了和量化相关各种函数指针。x264_quant_function_t的定义如下所示。
typedef struct
{
int (*quant_8x8) ( dctcoef dct[64], udctcoef mf[64], udctcoef bias[64] );
int (*quant_4x4) ( dctcoef dct[16], udctcoef mf[16], udctcoef bias[16] );
int (*quant_4x4x4)( dctcoef dct[4][16], udctcoef mf[16], udctcoef bias[16] );
int (*quant_4x4_dc)( dctcoef dct[16], int mf, int bias );
int (*quant_2x2_dc)( dctcoef dct[4], int mf, int bias );
void (*dequant_8x8)( dctcoef dct[64], int dequant_mf[6][64], int i_qp );
void (*dequant_4x4)( dctcoef dct[16], int dequant_mf[6][16], int i_qp );
void (*dequant_4x4_dc)( dctcoef dct[16], int dequant_mf[6][16], int i_qp );
void (*idct_dequant_2x4_dc)( dctcoef dct[8], dctcoef dct4x4[8][16], int dequant_mf[6][16], int i_qp );
void (*idct_dequant_2x4_dconly)( dctcoef dct[8], int dequant_mf[6][16], int i_qp );
int (*optimize_chroma_2x2_dc)( dctcoef dct[4], int dequant_mf );
int (*optimize_chroma_2x4_dc)( dctcoef dct[8], int dequant_mf );
void (*denoise_dct)( dctcoef *dct, uint32_t *sum, udctcoef *offset, int size );
int (*decimate_score15)( dctcoef *dct );
int (*decimate_score16)( dctcoef *dct );
int (*decimate_score64)( dctcoef *dct );
int (*coeff_last[14])( dctcoef *dct );
int (*coeff_last4)( dctcoef *dct );
int (*coeff_last8)( dctcoef *dct );
int (*coeff_level_run[13])( dctcoef *dct, x264_run_level_t *runlevel );
int (*coeff_level_run4)( dctcoef *dct, x264_run_level_t *runlevel );
int (*coeff_level_run8)( dctcoef *dct, x264_run_level_t *runlevel );
#define TRELLIS_PARAMS const int *unquant_mf, const uint8_t *zigzag, int lambda2,\
int last_nnz, dctcoef *coefs, dctcoef *quant_coefs, dctcoef *dct,\
uint8_t *cabac_state_sig, uint8_t *cabac_state_last,\
uint64_t level_state0, uint16_t level_state1
int (*trellis_cabac_4x4)( TRELLIS_PARAMS, int b_ac );
int (*trellis_cabac_8x8)( TRELLIS_PARAMS, int b_interlaced );
int (*trellis_cabac_4x4_psy)( TRELLIS_PARAMS, int b_ac, dctcoef *fenc_dct, int psy_trellis );
int (*trellis_cabac_8x8_psy)( TRELLIS_PARAMS, int b_interlaced, dctcoef *fenc_dct, int psy_trellis );
int (*trellis_cabac_dc)( TRELLIS_PARAMS, int num_coefs );
int (*trellis_cabac_chroma_422_dc)( TRELLIS_PARAMS );
} x264_quant_function_t;
x264_quant_init ()的工作就是对x264_quant_function_t中的函数指针进行赋值。下文举例分析其中2个函数:4x4矩阵量化函数quant_4x4(),4个4x4矩阵量化函数quant_4x4x4()。
相关知识简述
简单记录一下量化的概念。量化是H.264视频压缩编码中对视频质量影响最大的地方,也是会导致“信息丢失”的地方。量化的原理可以表示为下面公式:
FQ=round(y/Qstep)
其中,y 为输入样本点编码,Qstep为量化步长,FQ 为y 的量化值,round()为取整函数(其输出为与输入实数最近的整数)。其相反过程,即反量化为:
在H.264 中,量化步长Qstep 共有52 个值,如下表所示。其中QP 是量化参数,是量化步长的序号。当QP 取最小值0 时代表最精细的量化,当QP 取最大值51 时代表最粗糙的量化。QP 每增加6,Qstep 增加一倍。

《H.264标准》中规定,量化过程除了完成本职工作外,还需要完成它前一步DCT变换中“系数相乘”的工作。这一步骤的推导过程不再记录,直接给出最终的公式(这个公式完全为整数运算,同时避免了除法的使用):
sign(Zij) = sign (Wij)
其中:sign()为符号函数。
Wij为DCT变换后的系数。
MF的值如下表所示。表中只列出对应QP 值为0 到5 的MF 值。QP大于6之后,将QP实行对6取余数操作,再找到MF的值。
qbits计算公式为“qbits = 15 + floor(QP/6)”。即它的值随QP 值每增加6 而增加1。
f 是偏移量(用于改善恢复图像的视觉效果)。对帧内预测图像块取2^qbits/3,对帧间预测图像块取2^qbits/6。
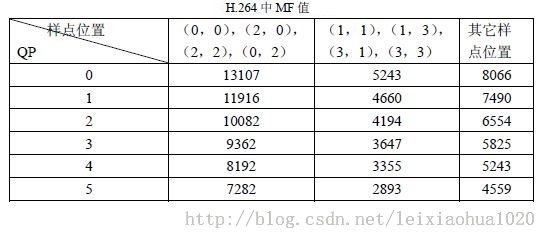

quant_4x4()
quant_4x4()用于对4x4的DCT残差矩阵进行量化。该函数的定义位于common\quant.c,如下所示。//4x4量化
//输入输出都是dct[16]
static int quant_4x4( dctcoef dct[16], udctcoef mf[16], udctcoef bias[16] )
{
int nz = 0;
//循环16个元素
for( int i = 0; i < 16; i++ )
QUANT_ONE( dct[i], mf[i], bias[i] );
return !!nz;
}可以看出quant_4x4()循环16次调用了QUANT_ONE()完成了量化工作。并且将DCT系数值,MF值,bias偏移值直接传递给了该宏。
QUANT_ONE()
QUANT_ONE()完成了一个DCT系数的量化工作,它的定义如下。//量化1个元素
#define QUANT_ONE( coef, mf, f ) \
{ \
if( (coef) > 0 ) \
(coef) = (f + (coef)) * (mf) >> 16; \
else \
(coef) = - ((f - (coef)) * (mf) >> 16); \
nz |= (coef); \
}从QUANT_ONE()的定义可以看出,它实现了上文提到的H.264标准中的量化公式。
quant_4x4x4()
quant_4x4x4()用于对4个4x4的DCT残差矩阵进行量化。该函数的定义位于common\quant.c,如下所示。//处理4个4x4量化
//输入输出都是dct[4][16]
static int quant_4x4x4( dctcoef dct[4][16], udctcoef mf[16], udctcoef bias[16] )
{
int nza = 0;
//处理4个
for( int j = 0; j < 4; j++ )
{
int nz = 0;
//量化
for( int i = 0; i < 16; i++ )
QUANT_ONE( dct[j][i], mf[i], bias[i] );
nza |= (!!nz)<<j;
}
return nza;
}从quant_4x4x4()的定义可以看出,该函数相当于调用了4次quant_4x4()函数。
x264_deblock_init()
x264_deblock_init()用于初始化去块效应滤波器相关的汇编函数。该函数的定义位于common\deblock.c,如下所示。//去块效应滤波
void x264_deblock_init( int cpu, x264_deblock_function_t *pf, int b_mbaff )
{
//注意:标记“v”的垂直滤波器是处理水平边界用的
//亮度-普通滤波器-边界强度Bs=1,2,3
pf->deblock_luma[1] = deblock_v_luma_c;
pf->deblock_luma[0] = deblock_h_luma_c;
//色度的
pf->deblock_chroma[1] = deblock_v_chroma_c;
pf->deblock_h_chroma_420 = deblock_h_chroma_c;
pf->deblock_h_chroma_422 = deblock_h_chroma_422_c;
//亮度-强滤波器-边界强度Bs=4
pf->deblock_luma_intra[1] = deblock_v_luma_intra_c;
pf->deblock_luma_intra[0] = deblock_h_luma_intra_c;
pf->deblock_chroma_intra[1] = deblock_v_chroma_intra_c;
pf->deblock_h_chroma_420_intra = deblock_h_chroma_intra_c;
pf->deblock_h_chroma_422_intra = deblock_h_chroma_422_intra_c;
pf->deblock_luma_mbaff = deblock_h_luma_mbaff_c;
pf->deblock_chroma_420_mbaff = deblock_h_chroma_mbaff_c;
pf->deblock_luma_intra_mbaff = deblock_h_luma_intra_mbaff_c;
pf->deblock_chroma_420_intra_mbaff = deblock_h_chroma_intra_mbaff_c;
pf->deblock_strength = deblock_strength_c;
#if HAVE_MMX
if( cpu&X264_CPU_MMX2 )
{
#if ARCH_X86
pf->deblock_luma[1] = x264_deblock_v_luma_mmx2;
pf->deblock_luma[0] = x264_deblock_h_luma_mmx2;
pf->deblock_chroma[1] = x264_deblock_v_chroma_mmx2;
pf->deblock_h_chroma_420 = x264_deblock_h_chroma_mmx2;
pf->deblock_chroma_420_mbaff = x264_deblock_h_chroma_mbaff_mmx2;
pf->deblock_h_chroma_422 = x264_deblock_h_chroma_422_mmx2;
pf->deblock_h_chroma_422_intra = x264_deblock_h_chroma_422_intra_mmx2;
pf->deblock_luma_intra[1] = x264_deblock_v_luma_intra_mmx2;
pf->deblock_luma_intra[0] = x264_deblock_h_luma_intra_mmx2;
pf->deblock_chroma_intra[1] = x264_deblock_v_chroma_intra_mmx2;
pf->deblock_h_chroma_420_intra = x264_deblock_h_chroma_intra_mmx2;
pf->deblock_chroma_420_intra_mbaff = x264_deblock_h_chroma_intra_mbaff_mmx2;
#endif
//此处省略大量的X86、ARM等平台的汇编函数初始化代码
}
从源代码可以看出,x264_deblock_init()中初始化了一系列环路滤波函数。这些函数名称的规则如下:
(1)包含“v”的是垂直滤波器,用于处理水平边界;包含“h”的是水平滤波器,用于处理垂直边界。
(2)包含“luma”的是亮度滤波器,包含“chroma”的是色度滤波器。
(3)包含“intra”的是处理边界强度Bs为4的强滤波器,不包含“intra”的是普通滤波器。
x264_deblock_init()的输入参数x264_deblock_function_t是一个结构体,其中包含了环路滤波器相关的函数指针。x264_deblock_function_t的定义如下所示。
typedef struct
{
x264_deblock_inter_t deblock_luma[2];
x264_deblock_inter_t deblock_chroma[2];
x264_deblock_inter_t deblock_h_chroma_420;
x264_deblock_inter_t deblock_h_chroma_422;
x264_deblock_intra_t deblock_luma_intra[2];
x264_deblock_intra_t deblock_chroma_intra[2];
x264_deblock_intra_t deblock_h_chroma_420_intra;
x264_deblock_intra_t deblock_h_chroma_422_intra;
x264_deblock_inter_t deblock_luma_mbaff;
x264_deblock_inter_t deblock_chroma_mbaff;
x264_deblock_inter_t deblock_chroma_420_mbaff;
x264_deblock_inter_t deblock_chroma_422_mbaff;
x264_deblock_intra_t deblock_luma_intra_mbaff;
x264_deblock_intra_t deblock_chroma_intra_mbaff;
x264_deblock_intra_t deblock_chroma_420_intra_mbaff;
x264_deblock_intra_t deblock_chroma_422_intra_mbaff;
void (*deblock_strength) ( uint8_t nnz[X264_SCAN8_SIZE], int8_t ref[2][X264_SCAN8_LUMA_SIZE],
int16_t mv[2][X264_SCAN8_LUMA_SIZE][2], uint8_t bs[2][8][4], int mvy_limit,
int bframe );
} x264_deblock_function_t;x264_deblock_init()的工作就是对x264_deblock_function_t中的函数指针进行赋值。可以看出x264_deblock_function_t中很多的元素是一个包含2个元素的数组,例如deblock_luma[2],deblock_luma_intra[2]等。这些数组中的元素[0]一般是水平滤波器,而元素[1]是垂直滤波器。下文将会举例分析一个普通边界的亮度垂直滤波器函数deblock_v_luma_c()。
相关知识简述
简单记录一下环路滤波(去块效应滤波)的知识。X264的重建帧(通过解码得到)一般情况下会出现方块效应。产生这种效应的原因主要有两个:(1)DCT变换后的量化造成误差(主要原因)。正是由于这种块效应的存在,才需要添加环路滤波器调整相邻的“块”边缘上的像素值以减轻这种视觉上的不连续感。下面一张图显示了环路滤波的效果。图中左边的图没有使用环路滤波,而右边的图使用了环路滤波。
(2)运动补偿

环路滤波分类
环路滤波器根据滤波的强度可以分为两种:
(1)普通滤波器。针对边界的Bs(边界强度)为1、2、3的滤波器。此时环路滤波涉及到方块边界周围的6个点(边界两边各3个点):p2,p1,p0,q0,q1,q2。需要处理4个点(边界两边各2个点,只以p点为例):
条件(针对两边的图像块) |
Bs |
有一个块为帧内预测 + 边界为宏块边界 |
4 |
有一个块为帧内预测 |
3 |
有一个块对残差编码 |
2 |
运动矢量差不小于1像素 |
1 |
运动补偿参考帧不同 |
1 |
其它 |
0 |
总体说来,与帧内预测相关的图像块(帧内预测块)的边界强度比较大,取值为3或者4;与运动补偿相关的图像块(帧间预测块)的边界强度比较小,取值为1。
环路滤波的门限
并不是所有的块的边界处都需要环路滤波。例如画面中物体的边界正好和块的边界重合的话,就不能进行滤波,否则会使画面中物体的边界变模糊。因此需要区别开物体边界和块效应边界。一般情况下,物体边界两边的像素值差别很大,而块效应边界两边像素值差别比较小。《H.264标准》以这个特点定义了2个变量alpha和beta来判决边界是否需要进行环路滤波。只有满足下面三个条件的时候才能进行环路滤波:
deblock_v_luma_c()
deblock_v_luma_c()是一个普通强度的垂直滤波器,用于处理边界强度Bs为1,2,3的水平边界。该函数的定义位于common\deblock.c,如下所示。//去块效应滤波-普通滤波,Bs为1,2,3
//垂直(Vertical)滤波器
// 边界
// x
// x
// 边界----------
// x
// x
//
//
static void deblock_v_luma_c( pixel *pix, intptr_t stride, int alpha, int beta, int8_t *tc0 )
{
//xstride=stride(用于选择滤波的像素)
//ystride=1
deblock_luma_c( pix, stride, 1, alpha, beta, tc0 );
}
可以看出deblock_v_luma_c()调用了另一个函数deblock_luma_c()。需要注意传递给deblock_luma_c()是一个水平滤波器和垂直滤波器都会调用的“通用”滤波器函数。在这里传递给deblock_luma_c()第二个参数xstride的值为stride,第三个参数ystride的值为1。
deblock_luma_c()
deblock_luma_c()是一个通用的滤波器函数,定义如下所示。//去块效应滤波-普通滤波,Bs为1,2,3
static inline void deblock_luma_c( pixel *pix, intptr_t xstride, intptr_t ystride, int alpha, int beta, int8_t *tc0 )
{
for( int i = 0; i < 4; i++ )
{
if( tc0[i] < 0 )
{
pix += 4*ystride;
continue;
}
//滤4个像素
for( int d = 0; d < 4; d++, pix += ystride )
deblock_edge_luma_c( pix, xstride, alpha, beta, tc0[i] );
}
}
从源代码中可以看出,具体的滤波在deblock_edge_luma_c()中完成。处理完一个像素后,会继续处理与当前像素距离为ystride的像素。
deblock_edge_luma_c()
deblock_edge_luma_c()用于完成具体的滤波工作。该函数的定义如下所示。/* From ffmpeg */
//去块效应滤波-普通滤波,Bs为1,2,3
//从FFmpeg复制过来的?
static ALWAYS_INLINE void deblock_edge_luma_c( pixel *pix, intptr_t xstride, int alpha, int beta, int8_t tc0 )
{
//p和q
//如果xstride=stride,ystride=1
//就是处理纵向的6个像素
//对应的是方块的横向边界的滤波,即如下所示:
// p2
// p1
// p0
//=====图像边界=====
// q0
// q1
// q2
//
//如果xstride=1,ystride=stride
//就是处理纵向的6个像素
//对应的是方块的横向边界的滤波,即如下所示:
// ||
// p2 p1 p0 || q0 q1 q2
// ||
// 边界
//注意:这里乘的是xstride
int p2 = pix[-3*xstride];
int p1 = pix[-2*xstride];
int p0 = pix[-1*xstride];
int q0 = pix[ 0*xstride];
int q1 = pix[ 1*xstride];
int q2 = pix[ 2*xstride];
//计算方法参考相关的标准
//alpha和beta是用于检查图像内容的2个参数
//只有满足if()里面3个取值条件的时候(只涉及边界旁边的4个点),才会滤波
if( abs( p0 - q0 ) < alpha && abs( p1 - p0 ) < beta && abs( q1 - q0 ) < beta )
{
int tc = tc0;
int delta;
//上面2个点(p0,p2)满足条件的时候,滤波p1
//int x264_clip3( int v, int i_min, int i_max )用于限幅
if( abs( p2 - p0 ) < beta )
{
if( tc0 )
pix[-2*xstride] = p1 + x264_clip3( (( p2 + ((p0 + q0 + 1) >> 1)) >> 1) - p1, -tc0, tc0 );
tc++;
}
//下面2个点(q0,q2)满足条件的时候,滤波q1
if( abs( q2 - q0 ) < beta )
{
if( tc0 )
pix[ 1*xstride] = q1 + x264_clip3( (( q2 + ((p0 + q0 + 1) >> 1)) >> 1) - q1, -tc0, tc0 );
tc++;
}
delta = x264_clip3( (((q0 - p0 ) << 2) + (p1 - q1) + 4) >> 3, -tc, tc );
//p0
pix[-1*xstride] = x264_clip_pixel( p0 + delta ); /* p0' */
//q0
pix[ 0*xstride] = x264_clip_pixel( q0 - delta ); /* q0' */
}
}从源代码可以看出,deblock_edge_luma_c()实现了前文记录的滤波公式。
deblock_h_luma_c()
deblock_h_luma_c()是一个普通强度的水平滤波器,用于处理边界强度Bs为1,2,3的垂直边界。该函数的定义如下所示。//去块效应滤波-普通滤波,Bs为1,2,3
//水平(Horizontal)滤波器
// 边界
// |
// x x x | x x x
// |
static void deblock_h_luma_c( pixel *pix, intptr_t stride, int alpha, int beta, int8_t *tc0 )
{
//xstride=1(用于选择滤波的像素)
//ystride=stride
deblock_luma_c( pix, 1, stride, alpha, beta, tc0 );
}从源代码可以看出,和deblock_v_luma_c()类似,deblock_h_luma_c()同样调用了deblock_luma_c()函数。唯一的不同在于它传递给deblock_luma_c()的第2个参数xstride为1,第3个参数ystride为stride。
mbcmp_init()
mbcmp_init()函数决定了x264_pixel_function_t中的像素比较的一系列函数(mbcmp[])使用SAD还是SATD。该函数的定义位于encoder\encoder.c,如下所示。//决定了像素比较的时候用SAD还是SATD
static void mbcmp_init( x264_t *h )
{
//b_lossless一般为0
//主要看i_subpel_refine,大于1的话就使用SATD
int satd = !h->mb.b_lossless && h->param.analyse.i_subpel_refine > 1;
//sad或者satd赋值给mbcmp
memcpy( h->pixf.mbcmp, satd ? h->pixf.satd : h->pixf.sad_aligned, sizeof(h->pixf.mbcmp) );
memcpy( h->pixf.mbcmp_unaligned, satd ? h->pixf.satd : h->pixf.sad, sizeof(h->pixf.mbcmp_unaligned) );
h->pixf.intra_mbcmp_x3_16x16 = satd ? h->pixf.intra_satd_x3_16x16 : h->pixf.intra_sad_x3_16x16;
h->pixf.intra_mbcmp_x3_8x16c = satd ? h->pixf.intra_satd_x3_8x16c : h->pixf.intra_sad_x3_8x16c;
h->pixf.intra_mbcmp_x3_8x8c = satd ? h->pixf.intra_satd_x3_8x8c : h->pixf.intra_sad_x3_8x8c;
h->pixf.intra_mbcmp_x3_8x8 = satd ? h->pixf.intra_sa8d_x3_8x8 : h->pixf.intra_sad_x3_8x8;
h->pixf.intra_mbcmp_x3_4x4 = satd ? h->pixf.intra_satd_x3_4x4 : h->pixf.intra_sad_x3_4x4;
h->pixf.intra_mbcmp_x9_4x4 = h->param.b_cpu_independent || h->mb.b_lossless ? NULL
: satd ? h->pixf.intra_satd_x9_4x4 : h->pixf.intra_sad_x9_4x4;
h->pixf.intra_mbcmp_x9_8x8 = h->param.b_cpu_independent || h->mb.b_lossless ? NULL
: satd ? h->pixf.intra_sa8d_x9_8x8 : h->pixf.intra_sad_x9_8x8;
satd &= h->param.analyse.i_me_method == X264_ME_TESA;
memcpy( h->pixf.fpelcmp, satd ? h->pixf.satd : h->pixf.sad, sizeof(h->pixf.fpelcmp) );
memcpy( h->pixf.fpelcmp_x3, satd ? h->pixf.satd_x3 : h->pixf.sad_x3, sizeof(h->pixf.fpelcmp_x3) );
memcpy( h->pixf.fpelcmp_x4, satd ? h->pixf.satd_x4 : h->pixf.sad_x4, sizeof(h->pixf.fpelcmp_x4) );
}
从mbcmp_init()的源代码可以看出,当i_subpel_refine取值大于1的时候,satd变量为1,此时后续代码中赋值给mbcmp[]相关的一系列函数指针的函数就是SATD函数;当i_subpel_refine取值小于等于1的时候,satd变量为0,此时后续代码中赋值给mbcmp[]相关的一系列函数指针的函数就是SAD函数。
至此x264_encoder_open()的源代码就分析完毕了。下文继续分析x264_encoder_headers()和x264_encoder_close()函数。
x264_encoder_headers()
x264_encoder_headers()是libx264的一个API函数,用于输出SPS/PPS/SEI这些H.264码流的头信息。该函数的声明如下。/* x264_encoder_headers: * return the SPS and PPS that will be used for the whole stream. * *pi_nal is the number of NAL units outputted in pp_nal. * returns the number of bytes in the returned NALs. * returns negative on error. * the payloads of all output NALs are guaranteed to be sequential in memory. */ int x264_encoder_headers( x264_t *, x264_nal_t **pp_nal, int *pi_nal );x264_encoder_headers()的定义位于encoder\encoder.c,如下所示。
/****************************************************************************
* x264_encoder_headers:
* 注释和处理:雷霄骅
* http://blog.csdn.net/leixiaohua1020
* leixiaohua1020@126.com
****************************************************************************/
//输出文件头(SPS、PPS、SEI)
int x264_encoder_headers( x264_t *h, x264_nal_t **pp_nal, int *pi_nal )
{
int frame_size = 0;
/* init bitstream context */
h->out.i_nal = 0;
bs_init( &h->out.bs, h->out.p_bitstream, h->out.i_bitstream );
/* Write SEI, SPS and PPS. */
/* generate sequence parameters */
//输出SPS
x264_nal_start( h, NAL_SPS, NAL_PRIORITY_HIGHEST );
x264_sps_write( &h->out.bs, h->sps );
if( x264_nal_end( h ) )
return -1;
/* generate picture parameters */
x264_nal_start( h, NAL_PPS, NAL_PRIORITY_HIGHEST );
//输出PPS
x264_pps_write( &h->out.bs, h->sps, h->pps );
if( x264_nal_end( h ) )
return -1;
/* identify ourselves */
x264_nal_start( h, NAL_SEI, NAL_PRIORITY_DISPOSABLE );
//输出SEI(其中包含了配置信息)
if( x264_sei_version_write( h, &h->out.bs ) )
return -1;
if( x264_nal_end( h ) )
return -1;
frame_size = x264_encoder_encapsulate_nals( h, 0 );
if( frame_size < 0 )
return -1;
/* now set output*/
*pi_nal = h->out.i_nal;
*pp_nal = &h->out.nal[0];
h->out.i_nal = 0;
return frame_size;
}
从源代码可以看出,x264_encoder_headers()分别调用了x264_sps_write(),x264_pps_write(),x264_sei_version_write()输出了SPS,PPS,和SEI信息。在输出每个NALU之前,需要调用x264_nal_start(),在输出NALU之后,需要调用x264_nal_end()。下文继续分析上述三个函数。
x264_sps_write()
x264_sps_write()用于输出SPS。该函数的定义位于encoder\set.c,如下所示。//输出SPS
void x264_sps_write( bs_t *s, x264_sps_t *sps )
{
bs_realign( s );
//型profile,8bit
bs_write( s, 8, sps->i_profile_idc );
bs_write1( s, sps->b_constraint_set0 );
bs_write1( s, sps->b_constraint_set1 );
bs_write1( s, sps->b_constraint_set2 );
bs_write1( s, sps->b_constraint_set3 );
bs_write( s, 4, 0 ); /* reserved */
//级level,8bit
bs_write( s, 8, sps->i_level_idc );
//本SPS的 id号
bs_write_ue( s, sps->i_id );
if( sps->i_profile_idc >= PROFILE_HIGH )
{
//色度取样格式
//0代表单色
//1代表4:2:0
//2代表4:2:2
//3代表4:4:4
bs_write_ue( s, sps->i_chroma_format_idc );
if( sps->i_chroma_format_idc == CHROMA_444 )
bs_write1( s, 0 ); // separate_colour_plane_flag
//亮度
//颜色位深=bit_depth_luma_minus8+8
bs_write_ue( s, BIT_DEPTH-8 ); // bit_depth_luma_minus8
//色度与亮度一样
bs_write_ue( s, BIT_DEPTH-8 ); // bit_depth_chroma_minus8
bs_write1( s, sps->b_qpprime_y_zero_transform_bypass );
bs_write1( s, 0 ); // seq_scaling_matrix_present_flag
}
//log2_max_frame_num_minus4主要是为读取另一个句法元素frame_num服务的
//frame_num 是最重要的句法元素之一
//这个句法元素指明了frame_num的所能达到的最大值:
//MaxFrameNum = 2^( log2_max_frame_num_minus4 + 4 )
bs_write_ue( s, sps->i_log2_max_frame_num - 4 );
//pic_order_cnt_type 指明了poc (picture order count) 的编码方法
//poc标识图像的播放顺序。
//由于H.264使用了B帧预测,使得图像的解码顺序并不一定等于播放顺序,但它们之间存在一定的映射关系
//poc 可以由frame-num 通过映射关系计算得来,也可以索性由编码器显式地传送。
//H.264 中一共定义了三种poc 的编码方法
bs_write_ue( s, sps->i_poc_type );
if( sps->i_poc_type == 0 )
bs_write_ue( s, sps->i_log2_max_poc_lsb - 4 );
//num_ref_frames 指定参考帧队列可能达到的最大长度,解码器依照这个句法元素的值开辟存储区,这个存储区用于存放已解码的参考帧,
//H.264 规定最多可用16 个参考帧,因此最大值为16。
bs_write_ue( s, sps->i_num_ref_frames );
bs_write1( s, sps->b_gaps_in_frame_num_value_allowed );
//pic_width_in_mbs_minus1加1后为图像宽(以宏块为单位):
// PicWidthInMbs = pic_width_in_mbs_minus1 + 1
//以像素为单位图像宽度(亮度):width=PicWidthInMbs*16
bs_write_ue( s, sps->i_mb_width - 1 );
//pic_height_in_map_units_minus1加1后指明图像高度(以宏块为单位)
bs_write_ue( s, (sps->i_mb_height >> !sps->b_frame_mbs_only) - 1);
bs_write1( s, sps->b_frame_mbs_only );
if( !sps->b_frame_mbs_only )
bs_write1( s, sps->b_mb_adaptive_frame_field );
bs_write1( s, sps->b_direct8x8_inference );
bs_write1( s, sps->b_crop );
if( sps->b_crop )
{
int h_shift = sps->i_chroma_format_idc == CHROMA_420 || sps->i_chroma_format_idc == CHROMA_422;
int v_shift = sps->i_chroma_format_idc == CHROMA_420;
bs_write_ue( s, sps->crop.i_left >> h_shift );
bs_write_ue( s, sps->crop.i_right >> h_shift );
bs_write_ue( s, sps->crop.i_top >> v_shift );
bs_write_ue( s, sps->crop.i_bottom >> v_shift );
}
bs_write1( s, sps->b_vui );
if( sps->b_vui )
{
bs_write1( s, sps->vui.b_aspect_ratio_info_present );
if( sps->vui.b_aspect_ratio_info_present )
{
int i;
static const struct { uint8_t w, h, sar; } sar[] =
{
// aspect_ratio_idc = 0 -> unspecified
{ 1, 1, 1 }, { 12, 11, 2 }, { 10, 11, 3 }, { 16, 11, 4 },
{ 40, 33, 5 }, { 24, 11, 6 }, { 20, 11, 7 }, { 32, 11, 8 },
{ 80, 33, 9 }, { 18, 11, 10}, { 15, 11, 11}, { 64, 33, 12},
{160, 99, 13}, { 4, 3, 14}, { 3, 2, 15}, { 2, 1, 16},
// aspect_ratio_idc = [17..254] -> reserved
{ 0, 0, 255 }
};
for( i = 0; sar[i].sar != 255; i++ )
{
if( sar[i].w == sps->vui.i_sar_width &&
sar[i].h == sps->vui.i_sar_height )
break;
}
bs_write( s, 8, sar[i].sar );
if( sar[i].sar == 255 ) /* aspect_ratio_idc (extended) */
{
bs_write( s, 16, sps->vui.i_sar_width );
bs_write( s, 16, sps->vui.i_sar_height );
}
}
bs_write1( s, sps->vui.b_overscan_info_present );
if( sps->vui.b_overscan_info_present )
bs_write1( s, sps->vui.b_overscan_info );
bs_write1( s, sps->vui.b_signal_type_present );
if( sps->vui.b_signal_type_present )
{
bs_write( s, 3, sps->vui.i_vidformat );
bs_write1( s, sps->vui.b_fullrange );
bs_write1( s, sps->vui.b_color_description_present );
if( sps->vui.b_color_description_present )
{
bs_write( s, 8, sps->vui.i_colorprim );
bs_write( s, 8, sps->vui.i_transfer );
bs_write( s, 8, sps->vui.i_colmatrix );
}
}
bs_write1( s, sps->vui.b_chroma_loc_info_present );
if( sps->vui.b_chroma_loc_info_present )
{
bs_write_ue( s, sps->vui.i_chroma_loc_top );
bs_write_ue( s, sps->vui.i_chroma_loc_bottom );
}
bs_write1( s, sps->vui.b_timing_info_present );
if( sps->vui.b_timing_info_present )
{
bs_write32( s, sps->vui.i_num_units_in_tick );
bs_write32( s, sps->vui.i_time_scale );
bs_write1( s, sps->vui.b_fixed_frame_rate );
}
bs_write1( s, sps->vui.b_nal_hrd_parameters_present );
if( sps->vui.b_nal_hrd_parameters_present )
{
bs_write_ue( s, sps->vui.hrd.i_cpb_cnt - 1 );
bs_write( s, 4, sps->vui.hrd.i_bit_rate_scale );
bs_write( s, 4, sps->vui.hrd.i_cpb_size_scale );
bs_write_ue( s, sps->vui.hrd.i_bit_rate_value - 1 );
bs_write_ue( s, sps->vui.hrd.i_cpb_size_value - 1 );
bs_write1( s, sps->vui.hrd.b_cbr_hrd );
bs_write( s, 5, sps->vui.hrd.i_initial_cpb_removal_delay_length - 1 );
bs_write( s, 5, sps->vui.hrd.i_cpb_removal_delay_length - 1 );
bs_write( s, 5, sps->vui.hrd.i_dpb_output_delay_length - 1 );
bs_write( s, 5, sps->vui.hrd.i_time_offset_length );
}
bs_write1( s, sps->vui.b_vcl_hrd_parameters_present );
if( sps->vui.b_nal_hrd_parameters_present || sps->vui.b_vcl_hrd_parameters_present )
bs_write1( s, 0 ); /* low_delay_hrd_flag */
bs_write1( s, sps->vui.b_pic_struct_present );
bs_write1( s, sps->vui.b_bitstream_restriction );
if( sps->vui.b_bitstream_restriction )
{
bs_write1( s, sps->vui.b_motion_vectors_over_pic_boundaries );
bs_write_ue( s, sps->vui.i_max_bytes_per_pic_denom );
bs_write_ue( s, sps->vui.i_max_bits_per_mb_denom );
bs_write_ue( s, sps->vui.i_log2_max_mv_length_horizontal );
bs_write_ue( s, sps->vui.i_log2_max_mv_length_vertical );
bs_write_ue( s, sps->vui.i_num_reorder_frames );
bs_write_ue( s, sps->vui.i_max_dec_frame_buffering );
}
}
//RBSP拖尾
//无论比特流当前位置是否字节对齐 , 都向其中写入一个比特1及若干个(0~7个)比特0 , 使其字节对齐
bs_rbsp_trailing( s );
bs_flush( s );
}
可以看出x264_sps_write()将x264_sps_t结构体中的信息输出出来形成了一个NALU。有关SPS相关的知识可以参考《H.264标准》。
x264_pps_write()
x264_pps_write()用于输出PPS。该函数的定义位于encoder\set.c,如下所示。//输出PPS
void x264_pps_write( bs_t *s, x264_sps_t *sps, x264_pps_t *pps )
{
bs_realign( s );
//PPS的ID
bs_write_ue( s, pps->i_id );
//该PPS引用的SPS的ID
bs_write_ue( s, pps->i_sps_id );
//entropy_coding_mode_flag
//0表示熵编码使用CAVLC,1表示熵编码使用CABAC
bs_write1( s, pps->b_cabac );
bs_write1( s, pps->b_pic_order );
bs_write_ue( s, pps->i_num_slice_groups - 1 );
bs_write_ue( s, pps->i_num_ref_idx_l0_default_active - 1 );
bs_write_ue( s, pps->i_num_ref_idx_l1_default_active - 1 );
//P Slice 是否使用加权预测?
bs_write1( s, pps->b_weighted_pred );
//B Slice 是否使用加权预测?
bs_write( s, 2, pps->b_weighted_bipred );
//pic_init_qp_minus26加26后用以指明亮度分量的QP的初始值。
bs_write_se( s, pps->i_pic_init_qp - 26 - QP_BD_OFFSET );
bs_write_se( s, pps->i_pic_init_qs - 26 - QP_BD_OFFSET );
bs_write_se( s, pps->i_chroma_qp_index_offset );
bs_write1( s, pps->b_deblocking_filter_control );
bs_write1( s, pps->b_constrained_intra_pred );
bs_write1( s, pps->b_redundant_pic_cnt );
if( pps->b_transform_8x8_mode || pps->i_cqm_preset != X264_CQM_FLAT )
{
bs_write1( s, pps->b_transform_8x8_mode );
bs_write1( s, (pps->i_cqm_preset != X264_CQM_FLAT) );
if( pps->i_cqm_preset != X264_CQM_FLAT )
{
scaling_list_write( s, pps, CQM_4IY );
scaling_list_write( s, pps, CQM_4IC );
bs_write1( s, 0 ); // Cr = Cb
scaling_list_write( s, pps, CQM_4PY );
scaling_list_write( s, pps, CQM_4PC );
bs_write1( s, 0 ); // Cr = Cb
if( pps->b_transform_8x8_mode )
{
if( sps->i_chroma_format_idc == CHROMA_444 )
{
scaling_list_write( s, pps, CQM_8IY+4 );
scaling_list_write( s, pps, CQM_8IC+4 );
bs_write1( s, 0 ); // Cr = Cb
scaling_list_write( s, pps, CQM_8PY+4 );
scaling_list_write( s, pps, CQM_8PC+4 );
bs_write1( s, 0 ); // Cr = Cb
}
else
{
scaling_list_write( s, pps, CQM_8IY+4 );
scaling_list_write( s, pps, CQM_8PY+4 );
}
}
}
bs_write_se( s, pps->i_chroma_qp_index_offset );
}
//RBSP拖尾
//无论比特流当前位置是否字节对齐 , 都向其中写入一个比特1及若干个(0~7个)比特0 , 使其字节对齐
bs_rbsp_trailing( s );
bs_flush( s );
}
可以看出x264_pps_write()将x264_pps_t结构体中的信息输出出来形成了一个NALU。
x264_sei_version_write()
x264_sei_version_write()用于输出SEI。SEI中一般存储了H.264中的一些附加信息,例如下图中红色方框中的文字就是x264存储在SEI中的中的信息。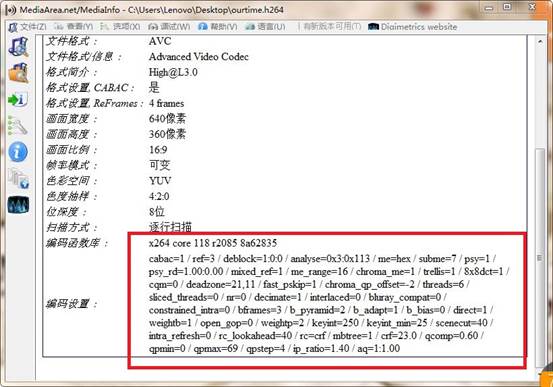
//输出SEI(其中包含了配置信息)
int x264_sei_version_write( x264_t *h, bs_t *s )
{
// random ID number generated according to ISO-11578
static const uint8_t uuid[16] =
{
0xdc, 0x45, 0xe9, 0xbd, 0xe6, 0xd9, 0x48, 0xb7,
0x96, 0x2c, 0xd8, 0x20, 0xd9, 0x23, 0xee, 0xef
};
//把设置信息转换为字符串
char *opts = x264_param2string( &h->param, 0 );
char *payload;
int length;
if( !opts )
return -1;
CHECKED_MALLOC( payload, 200 + strlen( opts ) );
memcpy( payload, uuid, 16 );
//配置信息的内容
//opts字符串内容还是挺多的
sprintf( payload+16, "x264 - core %d%s - H.264/MPEG-4 AVC codec - "
"Copy%s 2003-2014 - http://www.videolan.org/x264.html - options: %s",
X264_BUILD, X264_VERSION, HAVE_GPL?"left":"right", opts );
length = strlen(payload)+1;
//输出SEI
//数据类型为USER_DATA_UNREGISTERED
x264_sei_write( s, (uint8_t *)payload, length, SEI_USER_DATA_UNREGISTERED );
x264_free( opts );
x264_free( payload );
return 0;
fail:
x264_free( opts );
return -1;
}
从源代码可以看出,x264_sei_version_write()首先调用了x264_param2string()将当前的配置参数保存到字符串opts[]中,然后调用sprintf()结合opt[]生成完整的SEI信息,最后调用x264_sei_write()输出SEI信息。在这个过程中涉及到一个libx264的API函数x264_param2string()。
x264_param2string()
x264_param2string()用于将当前设置转换为字符串输出出来。该函数的声明如下。/* x264_param2string: return a (malloced) string containing most of * the encoding options */ char *x264_param2string( x264_param_t *p, int b_res );x264_param2string()的定义位于common\common.c,如下所示。
/****************************************************************************
* x264_param2string:
****************************************************************************/
//把设置信息转换为字符串
char *x264_param2string( x264_param_t *p, int b_res )
{
int len = 1000;
char *buf, *s;
if( p->rc.psz_zones )
len += strlen(p->rc.psz_zones);
//1000字节?
buf = s = x264_malloc( len );
if( !buf )
return NULL;
if( b_res )
{
s += sprintf( s, "%dx%d ", p->i_width, p->i_height );
s += sprintf( s, "fps=%u/%u ", p->i_fps_num, p->i_fps_den );
s += sprintf( s, "timebase=%u/%u ", p->i_timebase_num, p->i_timebase_den );
s += sprintf( s, "bitdepth=%d ", BIT_DEPTH );
}
if( p->b_opencl )
s += sprintf( s, "opencl=%d ", p->b_opencl );
s += sprintf( s, "cabac=%d", p->b_cabac );
s += sprintf( s, " ref=%d", p->i_frame_reference );
s += sprintf( s, " deblock=%d:%d:%d", p->b_deblocking_filter,
p->i_deblocking_filter_alphac0, p->i_deblocking_filter_beta );
s += sprintf( s, " analyse=%#x:%#x", p->analyse.intra, p->analyse.inter );
s += sprintf( s, " me=%s", x264_motion_est_names[ p->analyse.i_me_method ] );
s += sprintf( s, " subme=%d", p->analyse.i_subpel_refine );
s += sprintf( s, " psy=%d", p->analyse.b_psy );
if( p->analyse.b_psy )
s += sprintf( s, " psy_rd=%.2f:%.2f", p->analyse.f_psy_rd, p->analyse.f_psy_trellis );
s += sprintf( s, " mixed_ref=%d", p->analyse.b_mixed_references );
s += sprintf( s, " me_range=%d", p->analyse.i_me_range );
s += sprintf( s, " chroma_me=%d", p->analyse.b_chroma_me );
s += sprintf( s, " trellis=%d", p->analyse.i_trellis );
s += sprintf( s, " 8x8dct=%d", p->analyse.b_transform_8x8 );
s += sprintf( s, " cqm=%d", p->i_cqm_preset );
s += sprintf( s, " deadzone=%d,%d", p->analyse.i_luma_deadzone[0], p->analyse.i_luma_deadzone[1] );
s += sprintf( s, " fast_pskip=%d", p->analyse.b_fast_pskip );
s += sprintf( s, " chroma_qp_offset=%d", p->analyse.i_chroma_qp_offset );
s += sprintf( s, " threads=%d", p->i_threads );
s += sprintf( s, " lookahead_threads=%d", p->i_lookahead_threads );
s += sprintf( s, " sliced_threads=%d", p->b_sliced_threads );
if( p->i_slice_count )
s += sprintf( s, " slices=%d", p->i_slice_count );
if( p->i_slice_count_max )
s += sprintf( s, " slices_max=%d", p->i_slice_count_max );
if( p->i_slice_max_size )
s += sprintf( s, " slice_max_size=%d", p->i_slice_max_size );
if( p->i_slice_max_mbs )
s += sprintf( s, " slice_max_mbs=%d", p->i_slice_max_mbs );
if( p->i_slice_min_mbs )
s += sprintf( s, " slice_min_mbs=%d", p->i_slice_min_mbs );
s += sprintf( s, " nr=%d", p->analyse.i_noise_reduction );
s += sprintf( s, " decimate=%d", p->analyse.b_dct_decimate );
s += sprintf( s, " interlaced=%s", p->b_interlaced ? p->b_tff ? "tff" : "bff" : p->b_fake_interlaced ? "fake" : "0" );
s += sprintf( s, " bluray_compat=%d", p->b_bluray_compat );
if( p->b_stitchable )
s += sprintf( s, " stitchable=%d", p->b_stitchable );
s += sprintf( s, " constrained_intra=%d", p->b_constrained_intra );
s += sprintf( s, " bframes=%d", p->i_bframe );
if( p->i_bframe )
{
s += sprintf( s, " b_pyramid=%d b_adapt=%d b_bias=%d direct=%d weightb=%d open_gop=%d",
p->i_bframe_pyramid, p->i_bframe_adaptive, p->i_bframe_bias,
p->analyse.i_direct_mv_pred, p->analyse.b_weighted_bipred, p->b_open_gop );
}
s += sprintf( s, " weightp=%d", p->analyse.i_weighted_pred > 0 ? p->analyse.i_weighted_pred : 0 );
if( p->i_keyint_max == X264_KEYINT_MAX_INFINITE )
s += sprintf( s, " keyint=infinite" );
else
s += sprintf( s, " keyint=%d", p->i_keyint_max );
s += sprintf( s, " keyint_min=%d scenecut=%d intra_refresh=%d",
p->i_keyint_min, p->i_scenecut_threshold, p->b_intra_refresh );
if( p->rc.b_mb_tree || p->rc.i_vbv_buffer_size )
s += sprintf( s, " rc_lookahead=%d", p->rc.i_lookahead );
s += sprintf( s, " rc=%s mbtree=%d", p->rc.i_rc_method == X264_RC_ABR ?
( p->rc.b_stat_read ? "2pass" : p->rc.i_vbv_max_bitrate == p->rc.i_bitrate ? "cbr" : "abr" )
: p->rc.i_rc_method == X264_RC_CRF ? "crf" : "cqp", p->rc.b_mb_tree );
if( p->rc.i_rc_method == X264_RC_ABR || p->rc.i_rc_method == X264_RC_CRF )
{
if( p->rc.i_rc_method == X264_RC_CRF )
s += sprintf( s, " crf=%.1f", p->rc.f_rf_constant );
else
s += sprintf( s, " bitrate=%d ratetol=%.1f",
p->rc.i_bitrate, p->rc.f_rate_tolerance );
s += sprintf( s, " qcomp=%.2f qpmin=%d qpmax=%d qpstep=%d",
p->rc.f_qcompress, p->rc.i_qp_min, p->rc.i_qp_max, p->rc.i_qp_step );
if( p->rc.b_stat_read )
s += sprintf( s, " cplxblur=%.1f qblur=%.1f",
p->rc.f_complexity_blur, p->rc.f_qblur );
if( p->rc.i_vbv_buffer_size )
{
s += sprintf( s, " vbv_maxrate=%d vbv_bufsize=%d",
p->rc.i_vbv_max_bitrate, p->rc.i_vbv_buffer_size );
if( p->rc.i_rc_method == X264_RC_CRF )
s += sprintf( s, " crf_max=%.1f", p->rc.f_rf_constant_max );
}
}
else if( p->rc.i_rc_method == X264_RC_CQP )
s += sprintf( s, " qp=%d", p->rc.i_qp_constant );
if( p->rc.i_vbv_buffer_size )
s += sprintf( s, " nal_hrd=%s filler=%d", x264_nal_hrd_names[p->i_nal_hrd], p->rc.b_filler );
if( p->crop_rect.i_left | p->crop_rect.i_top | p->crop_rect.i_right | p->crop_rect.i_bottom )
s += sprintf( s, " crop_rect=%u,%u,%u,%u", p->crop_rect.i_left, p->crop_rect.i_top,
p->crop_rect.i_right, p->crop_rect.i_bottom );
if( p->i_frame_packing >= 0 )
s += sprintf( s, " frame-packing=%d", p->i_frame_packing );
if( !(p->rc.i_rc_method == X264_RC_CQP && p->rc.i_qp_constant == 0) )
{
s += sprintf( s, " ip_ratio=%.2f", p->rc.f_ip_factor );
if( p->i_bframe && !p->rc.b_mb_tree )
s += sprintf( s, " pb_ratio=%.2f", p->rc.f_pb_factor );
s += sprintf( s, " aq=%d", p->rc.i_aq_mode );
if( p->rc.i_aq_mode )
s += sprintf( s, ":%.2f", p->rc.f_aq_strength );
if( p->rc.psz_zones )
s += sprintf( s, " zones=%s", p->rc.psz_zones );
else if( p->rc.i_zones )
s += sprintf( s, " zones" );
}
return buf;
}
可以看出x264_param2string()几乎遍历了libx264的所有设置选项,使用“s += sprintf()”的形式将它们连接成一个很长的字符串,并最终将该字符串返回。
x264_encoder_close()
x264_encoder_close()是libx264的一个API函数。该函数用于关闭编码器,同时输出一些统计信息。该函数执行的时候输出的统计信息如下图所示。

/* x264_encoder_close: * close an encoder handler */ void x264_encoder_close ( x264_t * );x264_encoder_close()的定义位于encoder\encoder.c,如下所示。
/****************************************************************************
* x264_encoder_close:
* 注释和处理:雷霄骅
* http://blog.csdn.net/leixiaohua1020
* leixiaohua1020@126.com
****************************************************************************/
void x264_encoder_close ( x264_t *h )
{
int64_t i_yuv_size = FRAME_SIZE( h->param.i_width * h->param.i_height );
int64_t i_mb_count_size[2][7] = {{0}};
char buf[200];
int b_print_pcm = h->stat.i_mb_count[SLICE_TYPE_I][I_PCM]
|| h->stat.i_mb_count[SLICE_TYPE_P][I_PCM]
|| h->stat.i_mb_count[SLICE_TYPE_B][I_PCM];
x264_lookahead_delete( h );
#if HAVE_OPENCL
x264_opencl_lookahead_delete( h );
x264_opencl_function_t *ocl = h->opencl.ocl;
#endif
if( h->param.b_sliced_threads )
x264_threadpool_wait_all( h );
if( h->param.i_threads > 1 )
x264_threadpool_delete( h->threadpool );
if( h->param.i_lookahead_threads > 1 )
x264_threadpool_delete( h->lookaheadpool );
if( h->i_thread_frames > 1 )
{
for( int i = 0; i < h->i_thread_frames; i++ )
if( h->thread[i]->b_thread_active )
{
assert( h->thread[i]->fenc->i_reference_count == 1 );
x264_frame_delete( h->thread[i]->fenc );
}
x264_t *thread_prev = h->thread[h->i_thread_phase];
x264_thread_sync_ratecontrol( h, thread_prev, h );
x264_thread_sync_ratecontrol( thread_prev, thread_prev, h );
h->i_frame = thread_prev->i_frame + 1 - h->i_thread_frames;
}
h->i_frame++;
/*
* x264控制台输出示例
*
* x264 [info]: using cpu capabilities: MMX2 SSE2Fast SSSE3 SSE4.2 AVX
* x264 [info]: profile High, level 2.1
* x264 [info]: frame I:2 Avg QP:20.51 size: 20184 PSNR Mean Y:45.32 U:47.54 V:47.62 Avg:45.94 Global:45.52
* x264 [info]: frame P:33 Avg QP:23.08 size: 3230 PSNR Mean Y:43.23 U:47.06 V:46.87 Avg:44.15 Global:44.00
* x264 [info]: frame B:65 Avg QP:27.87 size: 352 PSNR Mean Y:42.76 U:47.21 V:47.05 Avg:43.79 Global:43.65
* x264 [info]: consecutive B-frames: 3.0% 10.0% 63.0% 24.0%
* x264 [info]: mb I I16..4: 15.3% 37.5% 47.3%
* x264 [info]: mb P I16..4: 0.6% 0.4% 0.2% P16..4: 34.6% 21.2% 12.7% 0.0% 0.0% skip:30.4%
* x264 [info]: mb B I16..4: 0.0% 0.0% 0.0% B16..8: 21.2% 4.1% 0.7% direct: 0.8% skip:73.1% L0:28.7% L1:53.0% BI:18.3%
* x264 [info]: 8x8 transform intra:37.1% inter:51.0%
* x264 [info]: coded y,uvDC,uvAC intra: 74.1% 83.3% 58.9% inter: 10.4% 6.6% 0.4%
* x264 [info]: i16 v,h,dc,p: 21% 25% 7% 48%
* x264 [info]: i8 v,h,dc,ddl,ddr,vr,hd,vl,hu: 25% 23% 13% 6% 5% 5% 6% 8% 10%
* x264 [info]: i4 v,h,dc,ddl,ddr,vr,hd,vl,hu: 22% 20% 9% 7% 7% 8% 8% 7% 12%
* x264 [info]: i8c dc,h,v,p: 43% 20% 27% 10%
* x264 [info]: Weighted P-Frames: Y:0.0% UV:0.0%
* x264 [info]: ref P L0: 62.5% 19.7% 13.8% 4.0%
* x264 [info]: ref B L0: 88.8% 9.4% 1.9%
* x264 [info]: ref B L1: 92.6% 7.4%
* x264 [info]: PSNR Mean Y:42.967 U:47.163 V:47.000 Avg:43.950 Global:43.796 kb/s:339.67
*
* encoded 100 frames, 178.25 fps, 339.67 kb/s
*
*/
/* Slices used and PSNR */
/* 示例
* x264 [info]: frame I:2 Avg QP:20.51 size: 20184 PSNR Mean Y:45.32 U:47.54 V:47.62 Avg:45.94 Global:45.52
* x264 [info]: frame P:33 Avg QP:23.08 size: 3230 PSNR Mean Y:43.23 U:47.06 V:46.87 Avg:44.15 Global:44.00
* x264 [info]: frame B:65 Avg QP:27.87 size: 352 PSNR Mean Y:42.76 U:47.21 V:47.05 Avg:43.79 Global:43.65
*/
for( int i = 0; i < 3; i++ )
{
static const uint8_t slice_order[] = { SLICE_TYPE_I, SLICE_TYPE_P, SLICE_TYPE_B };
int i_slice = slice_order[i];
if( h->stat.i_frame_count[i_slice] > 0 )
{
int i_count = h->stat.i_frame_count[i_slice];
double dur = h->stat.f_frame_duration[i_slice];
if( h->param.analyse.b_psnr )
{
//输出统计信息-包含PSNR
//注意PSNR都是通过SSD换算过来的,换算方法就是调用x264_psnr()方法
x264_log( h, X264_LOG_INFO,
"frame %c:%-5d Avg QP:%5.2f size:%6.0f PSNR Mean Y:%5.2f U:%5.2f V:%5.2f Avg:%5.2f Global:%5.2f\n",
slice_type_to_char[i_slice],
i_count,
h->stat.f_frame_qp[i_slice] / i_count,
(double)h->stat.i_frame_size[i_slice] / i_count,
h->stat.f_psnr_mean_y[i_slice] / dur, h->stat.f_psnr_mean_u[i_slice] / dur, h->stat.f_psnr_mean_v[i_slice] / dur,
h->stat.f_psnr_average[i_slice] / dur,
x264_psnr( h->stat.f_ssd_global[i_slice], dur * i_yuv_size ) );
}
else
{
//输出统计信息-不包含PSNR
x264_log( h, X264_LOG_INFO,
"frame %c:%-5d Avg QP:%5.2f size:%6.0f\n",
slice_type_to_char[i_slice],
i_count,
h->stat.f_frame_qp[i_slice] / i_count,
(double)h->stat.i_frame_size[i_slice] / i_count );
}
}
}
/* 示例
* x264 [info]: consecutive B-frames: 3.0% 10.0% 63.0% 24.0%
*
*/
if( h->param.i_bframe && h->stat.i_frame_count[SLICE_TYPE_B] )
{
//B帧相关信息
char *p = buf;
int den = 0;
// weight by number of frames (including the I/P-frames) that are in a sequence of N B-frames
for( int i = 0; i <= h->param.i_bframe; i++ )
den += (i+1) * h->stat.i_consecutive_bframes[i];
for( int i = 0; i <= h->param.i_bframe; i++ )
p += sprintf( p, " %4.1f%%", 100. * (i+1) * h->stat.i_consecutive_bframes[i] / den );
x264_log( h, X264_LOG_INFO, "consecutive B-frames:%s\n", buf );
}
for( int i_type = 0; i_type < 2; i_type++ )
for( int i = 0; i < X264_PARTTYPE_MAX; i++ )
{
if( i == D_DIRECT_8x8 ) continue; /* direct is counted as its own type */
i_mb_count_size[i_type][x264_mb_partition_pixel_table[i]] += h->stat.i_mb_partition[i_type][i];
}
/* MB types used */
/* 示例
* x264 [info]: mb I I16..4: 15.3% 37.5% 47.3%
* x264 [info]: mb P I16..4: 0.6% 0.4% 0.2% P16..4: 34.6% 21.2% 12.7% 0.0% 0.0% skip:30.4%
* x264 [info]: mb B I16..4: 0.0% 0.0% 0.0% B16..8: 21.2% 4.1% 0.7% direct: 0.8% skip:73.1% L0:28.7% L1:53.0% BI:18.3%
*/
if( h->stat.i_frame_count[SLICE_TYPE_I] > 0 )
{
int64_t *i_mb_count = h->stat.i_mb_count[SLICE_TYPE_I];
double i_count = h->stat.i_frame_count[SLICE_TYPE_I] * h->mb.i_mb_count / 100.0;
//Intra宏块信息-存于buf
//从左到右3个信息,依次为I16x16,I8x8,I4x4
x264_print_intra( i_mb_count, i_count, b_print_pcm, buf );
x264_log( h, X264_LOG_INFO, "mb I %s\n", buf );
}
if( h->stat.i_frame_count[SLICE_TYPE_P] > 0 )
{
int64_t *i_mb_count = h->stat.i_mb_count[SLICE_TYPE_P];
double i_count = h->stat.i_frame_count[SLICE_TYPE_P] * h->mb.i_mb_count / 100.0;
int64_t *i_mb_size = i_mb_count_size[SLICE_TYPE_P];
//Intra宏块信息-存于buf
x264_print_intra( i_mb_count, i_count, b_print_pcm, buf );
//Intra宏块信息-放在最前面
//后面添加P宏块信息
//从左到右6个信息,依次为P16x16, P16x8+P8x16, P8x8, P8x4+P4x8, P4x4, PSKIP
x264_log( h, X264_LOG_INFO,
"mb P %s P16..4: %4.1f%% %4.1f%% %4.1f%% %4.1f%% %4.1f%% skip:%4.1f%%\n",
buf,
i_mb_size[PIXEL_16x16] / (i_count*4),
(i_mb_size[PIXEL_16x8] + i_mb_size[PIXEL_8x16]) / (i_count*4),
i_mb_size[PIXEL_8x8] / (i_count*4),
(i_mb_size[PIXEL_8x4] + i_mb_size[PIXEL_4x8]) / (i_count*4),
i_mb_size[PIXEL_4x4] / (i_count*4),
i_mb_count[P_SKIP] / i_count );
}
if( h->stat.i_frame_count[SLICE_TYPE_B] > 0 )
{
int64_t *i_mb_count = h->stat.i_mb_count[SLICE_TYPE_B];
double i_count = h->stat.i_frame_count[SLICE_TYPE_B] * h->mb.i_mb_count / 100.0;
double i_mb_list_count;
int64_t *i_mb_size = i_mb_count_size[SLICE_TYPE_B];
int64_t list_count[3] = {0}; /* 0 == L0, 1 == L1, 2 == BI */
//Intra宏块信息
x264_print_intra( i_mb_count, i_count, b_print_pcm, buf );
for( int i = 0; i < X264_PARTTYPE_MAX; i++ )
for( int j = 0; j < 2; j++ )
{
int l0 = x264_mb_type_list_table[i][0][j];
int l1 = x264_mb_type_list_table[i][1][j];
if( l0 || l1 )
list_count[l1+l0*l1] += h->stat.i_mb_count[SLICE_TYPE_B][i] * 2;
}
list_count[0] += h->stat.i_mb_partition[SLICE_TYPE_B][D_L0_8x8];
list_count[1] += h->stat.i_mb_partition[SLICE_TYPE_B][D_L1_8x8];
list_count[2] += h->stat.i_mb_partition[SLICE_TYPE_B][D_BI_8x8];
i_mb_count[B_DIRECT] += (h->stat.i_mb_partition[SLICE_TYPE_B][D_DIRECT_8x8]+2)/4;
i_mb_list_count = (list_count[0] + list_count[1] + list_count[2]) / 100.0;
//Intra宏块信息-放在最前面
//后面添加B宏块信息
//从左到右5个信息,依次为B16x16, B16x8+B8x16, B8x8, BDIRECT, BSKIP
//
//SKIP和DIRECT区别
//P_SKIP的CBP为0,无像素残差,无运动矢量残
//B_SKIP宏块的模式为B_DIRECT且CBP为0,无像素残差,无运动矢量残
//B_DIRECT的CBP不为0,有像素残差,无运动矢量残
sprintf( buf + strlen(buf), " B16..8: %4.1f%% %4.1f%% %4.1f%% direct:%4.1f%% skip:%4.1f%%",
i_mb_size[PIXEL_16x16] / (i_count*4),
(i_mb_size[PIXEL_16x8] + i_mb_size[PIXEL_8x16]) / (i_count*4),
i_mb_size[PIXEL_8x8] / (i_count*4),
i_mb_count[B_DIRECT] / i_count,
i_mb_count[B_SKIP] / i_count );
if( i_mb_list_count != 0 )
sprintf( buf + strlen(buf), " L0:%4.1f%% L1:%4.1f%% BI:%4.1f%%",
list_count[0] / i_mb_list_count,
list_count[1] / i_mb_list_count,
list_count[2] / i_mb_list_count );
x264_log( h, X264_LOG_INFO, "mb B %s\n", buf );
}
//码率控制信息
/* 示例
* x264 [info]: final ratefactor: 20.01
*/
x264_ratecontrol_summary( h );
if( h->stat.i_frame_count[SLICE_TYPE_I] + h->stat.i_frame_count[SLICE_TYPE_P] + h->stat.i_frame_count[SLICE_TYPE_B] > 0 )
{
#define SUM3(p) (p[SLICE_TYPE_I] + p[SLICE_TYPE_P] + p[SLICE_TYPE_B])
#define SUM3b(p,o) (p[SLICE_TYPE_I][o] + p[SLICE_TYPE_P][o] + p[SLICE_TYPE_B][o])
int64_t i_i8x8 = SUM3b( h->stat.i_mb_count, I_8x8 );
int64_t i_intra = i_i8x8 + SUM3b( h->stat.i_mb_count, I_4x4 )
+ SUM3b( h->stat.i_mb_count, I_16x16 );
int64_t i_all_intra = i_intra + SUM3b( h->stat.i_mb_count, I_PCM);
int64_t i_skip = SUM3b( h->stat.i_mb_count, P_SKIP )
+ SUM3b( h->stat.i_mb_count, B_SKIP );
const int i_count = h->stat.i_frame_count[SLICE_TYPE_I] +
h->stat.i_frame_count[SLICE_TYPE_P] +
h->stat.i_frame_count[SLICE_TYPE_B];
int64_t i_mb_count = (int64_t)i_count * h->mb.i_mb_count;
int64_t i_inter = i_mb_count - i_skip - i_intra;
const double duration = h->stat.f_frame_duration[SLICE_TYPE_I] +
h->stat.f_frame_duration[SLICE_TYPE_P] +
h->stat.f_frame_duration[SLICE_TYPE_B];
float f_bitrate = SUM3(h->stat.i_frame_size) / duration / 125;
//隔行
if( PARAM_INTERLACED )
{
char *fieldstats = buf;
fieldstats[0] = 0;
if( i_inter )
fieldstats += sprintf( fieldstats, " inter:%.1f%%", h->stat.i_mb_field[1] * 100.0 / i_inter );
if( i_skip )
fieldstats += sprintf( fieldstats, " skip:%.1f%%", h->stat.i_mb_field[2] * 100.0 / i_skip );
x264_log( h, X264_LOG_INFO, "field mbs: intra: %.1f%%%s\n",
h->stat.i_mb_field[0] * 100.0 / i_intra, buf );
}
//8x8DCT信息
if( h->pps->b_transform_8x8_mode )
{
buf[0] = 0;
if( h->stat.i_mb_count_8x8dct[0] )
sprintf( buf, " inter:%.1f%%", 100. * h->stat.i_mb_count_8x8dct[1] / h->stat.i_mb_count_8x8dct[0] );
x264_log( h, X264_LOG_INFO, "8x8 transform intra:%.1f%%%s\n", 100. * i_i8x8 / i_intra, buf );
}
if( (h->param.analyse.i_direct_mv_pred == X264_DIRECT_PRED_AUTO ||
(h->stat.i_direct_frames[0] && h->stat.i_direct_frames[1]))
&& h->stat.i_frame_count[SLICE_TYPE_B] )
{
x264_log( h, X264_LOG_INFO, "direct mvs spatial:%.1f%% temporal:%.1f%%\n",
h->stat.i_direct_frames[1] * 100. / h->stat.i_frame_count[SLICE_TYPE_B],
h->stat.i_direct_frames[0] * 100. / h->stat.i_frame_count[SLICE_TYPE_B] );
}
buf[0] = 0;
int csize = CHROMA444 ? 4 : 1;
if( i_mb_count != i_all_intra )
sprintf( buf, " inter: %.1f%% %.1f%% %.1f%%",
h->stat.i_mb_cbp[1] * 100.0 / ((i_mb_count - i_all_intra)*4),
h->stat.i_mb_cbp[3] * 100.0 / ((i_mb_count - i_all_intra)*csize),
h->stat.i_mb_cbp[5] * 100.0 / ((i_mb_count - i_all_intra)*csize) );
/*
* 示例
* x264 [info]: coded y,uvDC,uvAC intra: 74.1% 83.3% 58.9% inter: 10.4% 6.6% 0.4%
*/
x264_log( h, X264_LOG_INFO, "coded y,%s,%s intra: %.1f%% %.1f%% %.1f%%%s\n",
CHROMA444?"u":"uvDC", CHROMA444?"v":"uvAC",
h->stat.i_mb_cbp[0] * 100.0 / (i_all_intra*4),
h->stat.i_mb_cbp[2] * 100.0 / (i_all_intra*csize),
h->stat.i_mb_cbp[4] * 100.0 / (i_all_intra*csize), buf );
/*
* 帧内预测信息
* 从上到下分别为I16x16,I8x8,I4x4
* 从左到右顺序为Vertical, Horizontal, DC, Plane ....
*
* 示例
*
* x264 [info]: i16 v,h,dc,p: 21% 25% 7% 48%
* x264 [info]: i8 v,h,dc,ddl,ddr,vr,hd,vl,hu: 25% 23% 13% 6% 5% 5% 6% 8% 10%
* x264 [info]: i4 v,h,dc,ddl,ddr,vr,hd,vl,hu: 22% 20% 9% 7% 7% 8% 8% 7% 12%
* x264 [info]: i8c dc,h,v,p: 43% 20% 27% 10%
*
*/
int64_t fixed_pred_modes[4][9] = {{0}};
int64_t sum_pred_modes[4] = {0};
for( int i = 0; i <= I_PRED_16x16_DC_128; i++ )
{
fixed_pred_modes[0][x264_mb_pred_mode16x16_fix[i]] += h->stat.i_mb_pred_mode[0][i];
sum_pred_modes[0] += h->stat.i_mb_pred_mode[0][i];
}
if( sum_pred_modes[0] )
x264_log( h, X264_LOG_INFO, "i16 v,h,dc,p: %2.0f%% %2.0f%% %2.0f%% %2.0f%%\n",
fixed_pred_modes[0][0] * 100.0 / sum_pred_modes[0],
fixed_pred_modes[0][1] * 100.0 / sum_pred_modes[0],
fixed_pred_modes[0][2] * 100.0 / sum_pred_modes[0],
fixed_pred_modes[0][3] * 100.0 / sum_pred_modes[0] );
for( int i = 1; i <= 2; i++ )
{
for( int j = 0; j <= I_PRED_8x8_DC_128; j++ )
{
fixed_pred_modes[i][x264_mb_pred_mode4x4_fix(j)] += h->stat.i_mb_pred_mode[i][j];
sum_pred_modes[i] += h->stat.i_mb_pred_mode[i][j];
}
if( sum_pred_modes[i] )
x264_log( h, X264_LOG_INFO, "i%d v,h,dc,ddl,ddr,vr,hd,vl,hu: %2.0f%% %2.0f%% %2.0f%% %2.0f%% %2.0f%% %2.0f%% %2.0f%% %2.0f%% %2.0f%%\n", (3-i)*4,
fixed_pred_modes[i][0] * 100.0 / sum_pred_modes[i],
fixed_pred_modes[i][1] * 100.0 / sum_pred_modes[i],
fixed_pred_modes[i][2] * 100.0 / sum_pred_modes[i],
fixed_pred_modes[i][3] * 100.0 / sum_pred_modes[i],
fixed_pred_modes[i][4] * 100.0 / sum_pred_modes[i],
fixed_pred_modes[i][5] * 100.0 / sum_pred_modes[i],
fixed_pred_modes[i][6] * 100.0 / sum_pred_modes[i],
fixed_pred_modes[i][7] * 100.0 / sum_pred_modes[i],
fixed_pred_modes[i][8] * 100.0 / sum_pred_modes[i] );
}
for( int i = 0; i <= I_PRED_CHROMA_DC_128; i++ )
{
fixed_pred_modes[3][x264_mb_chroma_pred_mode_fix[i]] += h->stat.i_mb_pred_mode[3][i];
sum_pred_modes[3] += h->stat.i_mb_pred_mode[3][i];
}
if( sum_pred_modes[3] && !CHROMA444 )
x264_log( h, X264_LOG_INFO, "i8c dc,h,v,p: %2.0f%% %2.0f%% %2.0f%% %2.0f%%\n",
fixed_pred_modes[3][0] * 100.0 / sum_pred_modes[3],
fixed_pred_modes[3][1] * 100.0 / sum_pred_modes[3],
fixed_pred_modes[3][2] * 100.0 / sum_pred_modes[3],
fixed_pred_modes[3][3] * 100.0 / sum_pred_modes[3] );
if( h->param.analyse.i_weighted_pred >= X264_WEIGHTP_SIMPLE && h->stat.i_frame_count[SLICE_TYPE_P] > 0 )
x264_log( h, X264_LOG_INFO, "Weighted P-Frames: Y:%.1f%% UV:%.1f%%\n",
h->stat.i_wpred[0] * 100.0 / h->stat.i_frame_count[SLICE_TYPE_P],
h->stat.i_wpred[1] * 100.0 / h->stat.i_frame_count[SLICE_TYPE_P] );
/*
* 参考帧信息
* 从左到右依次为不同序号的参考帧
*
* 示例
*
* x264 [info]: ref P L0: 62.5% 19.7% 13.8% 4.0%
* x264 [info]: ref B L0: 88.8% 9.4% 1.9%
* x264 [info]: ref B L1: 92.6% 7.4%
*
*/
for( int i_list = 0; i_list < 2; i_list++ )
for( int i_slice = 0; i_slice < 2; i_slice++ )
{
char *p = buf;
int64_t i_den = 0;
int i_max = 0;
for( int i = 0; i < X264_REF_MAX*2; i++ )
if( h->stat.i_mb_count_ref[i_slice][i_list][i] )
{
i_den += h->stat.i_mb_count_ref[i_slice][i_list][i];
i_max = i;
}
if( i_max == 0 )
continue;
for( int i = 0; i <= i_max; i++ )
p += sprintf( p, " %4.1f%%", 100. * h->stat.i_mb_count_ref[i_slice][i_list][i] / i_den );
x264_log( h, X264_LOG_INFO, "ref %c L%d:%s\n", "PB"[i_slice], i_list, buf );
}
if( h->param.analyse.b_ssim )
{
float ssim = SUM3( h->stat.f_ssim_mean_y ) / duration;
x264_log( h, X264_LOG_INFO, "SSIM Mean Y:%.7f (%6.3fdb)\n", ssim, x264_ssim( ssim ) );
}
/*
* 示例
*
* x264 [info]: PSNR Mean Y:42.967 U:47.163 V:47.000 Avg:43.950 Global:43.796 kb/s:339.67
*
*/
if( h->param.analyse.b_psnr )
{
x264_log( h, X264_LOG_INFO,
"PSNR Mean Y:%6.3f U:%6.3f V:%6.3f Avg:%6.3f Global:%6.3f kb/s:%.2f\n",
SUM3( h->stat.f_psnr_mean_y ) / duration,
SUM3( h->stat.f_psnr_mean_u ) / duration,
SUM3( h->stat.f_psnr_mean_v ) / duration,
SUM3( h->stat.f_psnr_average ) / duration,
x264_psnr( SUM3( h->stat.f_ssd_global ), duration * i_yuv_size ),
f_bitrate );
}
else
x264_log( h, X264_LOG_INFO, "kb/s:%.2f\n", f_bitrate );
}
//各种释放
/* rc */
x264_ratecontrol_delete( h );
/* param */
if( h->param.rc.psz_stat_out )
free( h->param.rc.psz_stat_out );
if( h->param.rc.psz_stat_in )
free( h->param.rc.psz_stat_in );
x264_cqm_delete( h );
x264_free( h->nal_buffer );
x264_free( h->reconfig_h );
x264_analyse_free_costs( h );
if( h->i_thread_frames > 1 )
h = h->thread[h->i_thread_phase];
/* frames */
x264_frame_delete_list( h->frames.unused[0] );
x264_frame_delete_list( h->frames.unused[1] );
x264_frame_delete_list( h->frames.current );
x264_frame_delete_list( h->frames.blank_unused );
h = h->thread[0];
for( int i = 0; i < h->i_thread_frames; i++ )
if( h->thread[i]->b_thread_active )
for( int j = 0; j < h->thread[i]->i_ref[0]; j++ )
if( h->thread[i]->fref[0][j] && h->thread[i]->fref[0][j]->b_duplicate )
x264_frame_delete( h->thread[i]->fref[0][j] );
if( h->param.i_lookahead_threads > 1 )
for( int i = 0; i < h->param.i_lookahead_threads; i++ )
x264_free( h->lookahead_thread[i] );
for( int i = h->param.i_threads - 1; i >= 0; i-- )
{
x264_frame_t **frame;
if( !h->param.b_sliced_threads || i == 0 )
{
for( frame = h->thread[i]->frames.reference; *frame; frame++ )
{
assert( (*frame)->i_reference_count > 0 );
(*frame)->i_reference_count--;
if( (*frame)->i_reference_count == 0 )
x264_frame_delete( *frame );
}
frame = &h->thread[i]->fdec;
if( *frame )
{
assert( (*frame)->i_reference_count > 0 );
(*frame)->i_reference_count--;
if( (*frame)->i_reference_count == 0 )
x264_frame_delete( *frame );
}
x264_macroblock_cache_free( h->thread[i] );
}
x264_macroblock_thread_free( h->thread[i], 0 );
x264_free( h->thread[i]->out.p_bitstream );
x264_free( h->thread[i]->out.nal );
x264_pthread_mutex_destroy( &h->thread[i]->mutex );
x264_pthread_cond_destroy( &h->thread[i]->cv );
x264_free( h->thread[i] );
}
#if HAVE_OPENCL
x264_opencl_close_library( ocl );
#endif
}
从源代码可以看出,x264_encoder_close()主要用于输出编码的统计信息。源代码中已经做了比较充分的注释,就不再详细叙述了。其中输出日志的时候用到了libx264中输出日志的API函数libx264(),下面记录一下。
x264_log()
x264_log()用于输出日志。该函数的定义位于common\common.c,如下所示。/****************************************************************************
* x264_log:
****************************************************************************/
//日志输出函数
void x264_log( x264_t *h, int i_level, const char *psz_fmt, ... )
{
if( !h || i_level <= h->param.i_log_level )
{
va_list arg;
va_start( arg, psz_fmt );
if( !h )
x264_log_default( NULL, i_level, psz_fmt, arg );//默认日志输出函数
else
h->param.pf_log( h->param.p_log_private, i_level, psz_fmt, arg );
va_end( arg );
}
}
可以看出x264_log()再开始的时候做了一个判断:只有该条日志级别i_level小于当前系统的日志级别param.i_log_level的时候,才会输出日志。libx264中定义了下面几种日志级别,数值越小,代表日志越紧急。
/* Log level */ #define X264_LOG_NONE (-1) #define X264_LOG_ERROR 0 #define X264_LOG_WARNING 1 #define X264_LOG_INFO 2 #define X264_LOG_DEBUG 3接下来x264_log()会根据输入的结构体x264_t是否为空来决定是调用x264_log_default()或者是x264_t中的param.pf_log()函数。假如都使用默认配置的话,param.pf_log()在x264_param_default()函数中也会被设置为指向x264_log_default()。因此可以继续看一下x264_log_default()函数。
x264_log_default()
x264_log_default()是libx264默认的日志输出函数。该函数的定义如下所示。//默认日志输出函数
static void x264_log_default( void *p_unused, int i_level, const char *psz_fmt, va_list arg )
{
char *psz_prefix;
//日志级别
switch( i_level )
{
case X264_LOG_ERROR:
psz_prefix = "error";
break;
case X264_LOG_WARNING:
psz_prefix = "warning";
break;
case X264_LOG_INFO:
psz_prefix = "info";
break;
case X264_LOG_DEBUG:
psz_prefix = "debug";
break;
default:
psz_prefix = "unknown";
break;
}
//日志级别两边加上“[]”
//输出到stderr
fprintf( stderr, "x264 [%s]: ", psz_prefix );
x264_vfprintf( stderr, psz_fmt, arg );
}
从源代码可以看出,x264_log_default()会在日志信息前面加上形如“x264 [日志级别]”的信息,然后将处理后的日志输出到stderr。
至此,对x264中x264_encoder_open(),x264_encoder_headers(),和x264_encoder_close()这三个函数的分析就完成了。下一篇文章继续记录x264编码器主干部分的x264_encoder_encode()函数。
雷霄骅
leixiaohua1020@126.com
http://blog.csdn.net/leixiaohua1020