Linux设备驱动子系统-SD卡
1. 总论
2. 主控制器
3. 协议层
4. 块设备
1. 总论
1.1 概念
- MMC - MultiMedia Card
- SD - Secure Digital Card
1.2 分类
- 按存储大小,普通SD卡(<=2GB,支持FAT12/FAT16),HCSD卡(>2GB,<=32GB,支持FAT32)
- 按体积大小,普通SD卡,mini-SD卡,micro-SD卡(TF卡)
1.3 速度
- 默认模式: 12.5MB/s
- 高速模式: 25MB/s
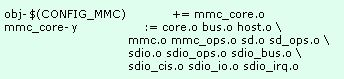
1.4 子系统代码结构
![]()
Linux源码里/drivers/mmc下有三个文件夹,分别存放了SD块设备,核心层和SD主控制器的相关代码,可以通过Kconfig和Makefile获取更多信息。
2. 主控制器
SD卡的控制器芯片,可以看成CPU的代言人,它为CPU分担了完成与SD卡数据通信的任务。
2.1 数据结构
以PXA芯片的SD控制器驱动为例,
struct pxamci_host {
struct mmc_host *mmc;
struct mmc_request *mrq;
struct mmc_command *cmd;
struct mmc_data *data;
... ...
};
2.1.1 struct mmc_host
结构体mmc_host定义于/include/linux/mmc/host.c,可以认为是linux为SD卡控制器专门准备的一个类,该类里面的成员是所有SD卡控制器都需要的,放之四海而皆准的数据结构,而在PXA芯片控制器的驱动程序pxamci.c中,则为该类具体化了一个对象struct mmc_host *mmc,此mmc指针即指代着该PXA芯片SD卡控制器的一个具体化对象。
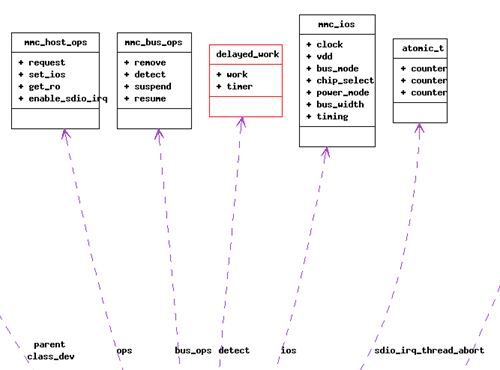
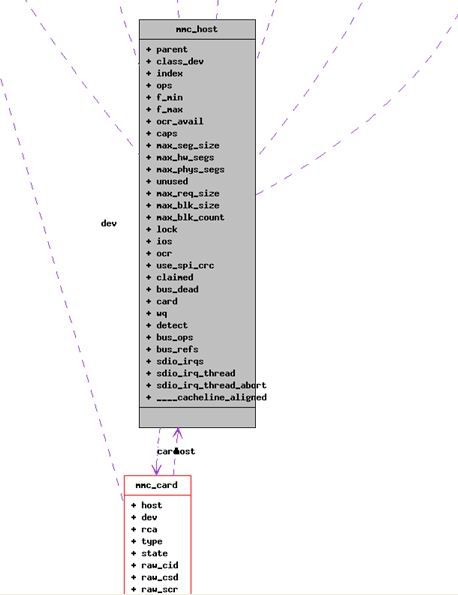
struct mmc_host {
const struct mmc_host_ops *ops; // SD卡主控制器的操作函数,即该控制器所具备的驱动能力
const struct mmc_bus_ops *bus_ops; // SD总线驱动的操作函数,即SD总线所具备的驱动能力
struct mmc_ios ios; // 配置时钟、总线、电源、片选、时序等
struct mmc_card *card; // 连接到此主控制器的SD卡设备
... ...
};
struct mmc_host_ops {
void (*request)(struct mmc_host *host, struct mmc_request *req); // 核心函数,完成主控制器与SD卡设备之间的数据通信
void (*set_ios)(struct mmc_host *host, struct mmc_ios *ios); // 配置时钟、总线、电源、片选、时序等
int (*get_ro)(struct mmc_host *host);
void (*enable_sdio_irq)(struct mmc_host *host, int enable);
};
struct mmc_bus_ops {
void (*remove)(struct mmc_host *); // 拔出SD卡的回调函数
void (*detect)(struct mmc_host *); // 探测SD卡是否还在SD总线上的回调函数
void (*suspend)(struct mmc_host *);
void (*resume)(struct mmc_host *);
};
struct mmc_card {
struct mmc_host *host; /* the host this device belongs to */
struct device dev; /* the device */
unsigned int rca; /* relative card address of device */
unsigned int type; /* card type */
unsigned int state; /* (our) card state */
unsigned int quirks; /* card quirks */
u32 raw_cid[4]; /* raw card CID */
u32 raw_csd[4]; /* raw card CSD */
u32 raw_scr[2]; /* raw card SCR */
struct mmc_cid cid; /* card identification */
struct mmc_csd csd; /* card specific */
struct mmc_ext_csd ext_csd; /* mmc v4 extended card specific */
struct sd_scr scr; /* extra SD information */
struct sd_switch_caps sw_caps; /* switch (CMD6) caps */
unsigned int sdio_funcs; /* number of SDIO functions */
struct sdio_cccr cccr; /* common card info */
struct sdio_cis cis; /* common tuple info */
... ...
};
mmc_card结构体内的数据结构主要存放SD卡的信息,其中RCA, CID, CSD, SCR为SD卡内部的32位寄存器。

2.1.2 struct mmc_request
结构体mmc_request定义于/include/linux/mmc/core.h,它主要存放两大数据结构的指针,分别是cmd和data,顾名思意,一个为指令,一个为数据,也就是说,mmc_request结构体存放了进行主控制器与sd卡间通信所需要的指令和数据,struct mmc_request, struct mmc_command *cmd, struct mmc_data *data三者之间的关系如下所示,
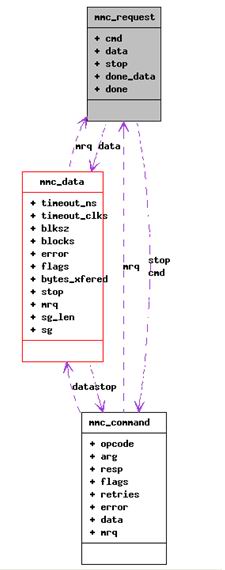
struct mmc_request {
struct mmc_command *cmd;
struct mmc_data *data;
struct mmc_command *stop;
void *done_data; /* completion data */
void (*done)(struct mmc_request *);/* completion function */
};
说到结构体mmc_command和mmc_data,就必须说说SD卡的协议了。
1) 物理结构
SD卡有9个pin脚(micro-SD为8个,少一个接地pin脚),如图所示,
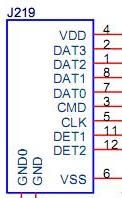
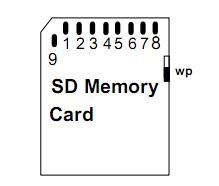
SD的数据传输方式有两种,普通SD模式和SPI模式,以SD模式为例,9个pin脚分别是VDD,VSS,CLK,以及我们需要关注的一根指令线CMD,4根数据线DAT0~DAT3。
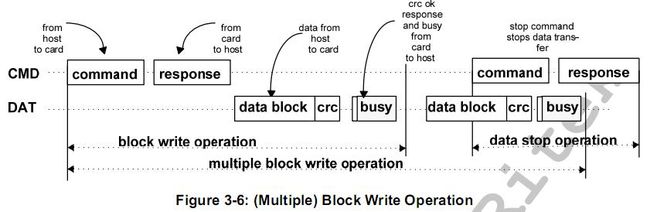
2) 传输模式
首先由主机向SD卡发送命令command,等待SD卡的回复response,如果成功收到回复,则进行数据传输。其中,指令线和数据线上传输的指令和数据都要遵循相应的协议格式。
3) 指令格式

一条指令command共48位,其中command index指代这条具体的指令名称,argument为该指令的参数。
一条回复response根据不同的指令有几种不同类型。
struct mmc_command {
u32 opcode; // 对应command index
u32 arg; // 对应argument
u32 resp[4]; // 对应response
unsigned int flags; /* expected response type */
... ...
unsigned int retries; /* max number of retries */
unsigned int error; /* command error */
struct mmc_data *data; /* data segment associated with cmd */
struct mmc_request *mrq; /* associated request */
};
4) 数据格式
数据传输按数据线可分为一线传输和四线传输,按数据大小可分为字节传输和块传输(512字节)。
struct mmc_data {
unsigned int timeout_ns; /* data timeout (in ns, max 80ms) */
unsigned int timeout_clks; /* data timeout (in clocks) */
unsigned int blksz; /* data block size */
unsigned int blocks; /* number of blocks */
unsigned int error; /* data error */
unsigned int flags;
#define MMC_DATA_WRITE (1 << 8)
#define MMC_DATA_READ (1 << 9)
#define MMC_DATA_STREAM (1 << 10)
unsigned int bytes_xfered;
struct mmc_command *stop; /* stop command */
struct mmc_request *mrq; /* associated request */
unsigned int sg_len; /* size of scatter list */
struct scatterlist *sg; /* I/O scatter list */
};
2.2 驱动程序
系统初始化时扫描platform总线上是否有名为该SD主控制器名字"pxa2xx-mci"的设备,如果有, 驱动程序将主控制器挂载到platform总线上,并注册该驱动程序。
static int __init pxamci_init(void)
{
return platform_driver_register(&pxamci_driver);
}
static struct platform_driver pxamci_driver = {
.probe = pxamci_probe,
.remove = pxamci_remove,
.suspend = pxamci_suspend,
.resume = pxamci_resume,
.driver = {
.name = “pxa2xx-mci”,
.owner = THIS_MODULE,
},
};
其中,remove为probe的反操作,suspend和resume涉及电源管理的内容,本文重点讨论probe。
SD主控制器驱动程序的初始化函数probe(struct platform_device *pdev),概括地讲,主要完成五大任务,
-
初始化设备的数据结构,并将数据挂载到pdev->dev.driver_data下
-
实现设备驱动的功能函数,如mmc->ops = &pxamci_ops;
-
申请中断函数request_irq()
- 注册设备,即注册kobject,建立sys文件,发送uevent等
-
其他需求,如在/proc/driver下建立用户交互文件等
2.2.1 注册设备
对于设备的注册,所有设备驱动的相关代码都类似。
static int pxamci_probe(struct platform_device *pdev)
{
mmc = mmc_alloc_host(sizeof(struct pxamci_host), &pdev->dev);
mmc_add_host(mmc);
... ...
}
这两个函数都由/drivers/mmc/core核心层下的host.c负责具体实现,
1) mmc_alloc_host
为主设备控制器建立数据结构,建立kobject,并初始化等待队列,工作队列,以及一些控制器的配置。其中,INIT_DELAYED_WORK(&host->detect, mmc_rescan);将探测SD卡的函数mmc_rescan与工作队列host->detect关联,mmc_rescan是整个SD子系统的核心函数,本文第三部分协议层将对它作重点讨论。
struct mmc_host *mmc_alloc_host(int extra, struct device *dev)
{
/* 建立数据结构 */
struct mmc_host *host;
host = kzalloc(sizeof(struct mmc_host) + extra, GFP_KERNEL);
/* 建立kobject */
host->parent = dev;
host->class_dev.parent = dev;
host->class_dev.class = &mmc_host_class;
device_initialize(&host->class_dev);
/* 初始化等待队列,工作队列 */
init_waitqueue_head(&host->wq);
INIT_DELAYED_WORK(&host->detect, mmc_rescan);
/* 配置控制器 */
host->max_hw_segs = 1;
host->max_phys_segs = 1;
... ...
return host;
}
2) mmc_add_host
完成kobject的注册,并调用mmc_rescan,目的在于在系统初始化的时候就扫描SD总线查看是否存在SD卡。注意到这里的工作队列的延时时间delay为0,因为系统启动的时候不考虑插拔SD卡,关于这个delay将在下文讨论。
int mmc_add_host(struct mmc_host *host)
{
device_add(&host->class_dev);
mmc_start_host(host);
... ...
}
void mmc_start_host(struct mmc_host *host)
{
mmc_power_off(host);
mmc_detect_change(host, 0);
}
void mmc_detect_change(struct mmc_host *host, unsigned long delay)
{
mmc_schedule_delayed_work(&host->detect, delay);
}
static int mmc_schedule_delayed_work(struct delayed_work *work, unsigned long delay)
{
wake_lock_timeout(&mmc_delayed_work_wake_lock, HZ * 2);
return queue_delayed_work(workqueue, work, delay);
}
{
struct pxamci_host *host = NULL;
mmc->max_hw_segs = NR_SG;
host->mmc = mmc;
host->dma = -1;
host->pdata = pdev->dev.platform_data;
host->clkrt = CLKRT_OFF;
host->clkrate = clk_get_rate(host->clk);
const char * name;
int id;
struct device dev;
u32 num_resources;
struct resource * resource;
};
.name = "pxa2xx-mci",
.id = 0,
.dev = {
.dma_mask = &pxamci_dmamask,
.coherent_dma_mask = 0xffffffff,
},
.num_resources = ARRAY_SIZE(pxamci_resources),
.resource = pxamci_resources,
};
[0] = {
.start = 0x41100000,
.end = 0x41100fff,
.flags = IORESOURCE_MEM, // SD主控制器芯片的起始地址
},
[1] = {
.start = IRQ_MMC, /* #define IRQ_MMC 23 */
.flags = IORESOURCE_IRQ, // 申请的中断号
},
... ...
void *platform_data; /* Platform specific data, device core doesn't touch it */
.detect_delay = 50,
.ocr_mask = MMC_VDD_32_33|MMC_VDD_33_34,
.init = saar_mci_init,
.exit = saar_mci_exit,
};
{
struct platform_device *pdev = to_platform_device(dev);
int cd_irq, gpio_cd; // cd - card detect
gpio_direction_input(gpio_cd); // 将GPIO61设为输入类型
... ...
得到SD主控制器特有数据后,将其挂载到dev.platform_data下,并最终完成对platform_device *dev的注册。
{
dev->dev.platform_data = data;
}
{
struct mmc_host *mmc;
struct pxamci_host *host = NULL;
struct resource *r;
int ret, irq;
r = request_mem_region(r->start, SZ_4K, DRIVER_NAME); // 为芯片申请4k的内存空间
host->res = r;
host->irq = irq;
2.2.3 设备驱动的功能函数
struct module *owner;
ssize_t (*read) (struct file *, char __user *, size_t, loff_t *);
ssize_t (*write) (struct file *, const char __user *, size_t, loff_t *);
int (*open) (struct inode *, struct file *);
};
{
.request = pxamci_request,
.get_ro = pxamci_get_ro,
.set_ios = pxamci_set_ios,
.enable_sdio_irq = pxamci_enable_sdio_irq,
};
{
struct pxamci_host *host = mmc_priv(mmc); unsigned int cmdat;
host->cmdat &= ~CMDAT_INIT;
pxamci_setup_data(host, mrq->data);
cmdat |= CMDAT_DATAEN | CMDAT_DMAEN;
if (mrq->data->flags & MMC_DATA_WRITE)
cmdat |= CMDAT_WRITE;
cmdat |= CMDAT_STREAM;
}
}
至此,我们必须去接触SD主控制器的芯片手册了。
首先,SD主控制器由一系列32位寄存器组成。通过软件的方式,即对寄存器赋值,来控制SD主控制器,进而扮演SD主控制器的角色与SD卡取得通信。

pxamci_setup_data(host, mrq->data); // 实现主控制器与SD卡之间数据的传输
cmdat |= CMDAT_DATAEN | CMDAT_DMAEN; // 有数据传输,使用DMA
if (mrq->data->flags & MMC_DATA_WRITE)
cmdat |= CMDAT_STREAM; // 设置为数据流stream模式
{
host->data = data;
writel(data->blksz, host->base + MMC_BLKLEN); // 设置一个块的大小(一般为512byte)
host->dma_dir = DMA_FROM_DEVICE;
dcmd = DCMD_INCTRGADDR | DCMD_FLOWTRG;
DRCMR(host->dma_drcmrtx) = 0;
DRCMR(host->dma_drcmrrx) = host->dma | DRCMR_MAPVLD;
} else {
host->dma_dir = DMA_TO_DEVICE;
dcmd = DCMD_INCSRCADDR | DCMD_FLOWSRC;
DRCMR(host->dma_drcmrrx) = 0;
DRCMR(host->dma_drcmrtx) = host->dma | DRCMR_MAPVLD;
}
unsigned int length = sg_dma_len(&data->sg[i]);
host->sg_cpu[i].dcmd = dcmd | length;
if (length & 31)
host->sg_cpu[i].dcmd |= DCMD_ENDIRQEN;
if (data->flags & MMC_DATA_READ) {
host->sg_cpu[i].dsadr = host->res->start + MMC_RXFIFO;
host->sg_cpu[i].dtadr = sg_dma_address(&data->sg[i]);
} else {
host->sg_cpu[i].dsadr = sg_dma_address(&data->sg[i]);
host->sg_cpu[i].dtadr = host->res->start + MMC_TXFIFO;
}
host->sg_cpu[i].ddadr = host->sg_dma + (i + 1) *
sizeof(struct pxa_dma_desc);
}
host->sg_cpu[host->dma_len - 1].ddadr = DDADR_STOP;
wmb();
DCSR(host->dma) = DCSR_RUN;
}
{
host->cmd = cmd;
cmdat |= CMDAT_BUSY;
switch (RSP_TYPE(mmc_resp_type(cmd))) {
case RSP_TYPE(MMC_RSP_R1): /* r1, r1b, r6, r7 */
cmdat |= CMDAT_RESP_SHORT;
break;
case RSP_TYPE(MMC_RSP_R3):
cmdat |= CMDAT_RESP_R3;
break;
case RSP_TYPE(MMC_RSP_R2):
cmdat |= CMDAT_RESP_R2;
break;
default:
break;
}
writel(cmd->arg >> 16, host->base + MMC_ARGH);
writel(cmd->arg & 0xffff, host->base + MMC_ARGL);
writel(cmdat, host->base + MMC_CMDAT);
}
{
DECLARE_COMPLETION_ONSTACK(complete);
mrq->done = mmc_wait_done;
}
{
... ...
}
1) 由主控芯片内部电路引起的中断
{
struct pxamci_host *host = devid; // 得到主控制器的数据
unsigned int ireg; int handled = 0;
ireg = readl(host->base + MMC_I_REG) & ~readl(host->base + MMC_I_MASK); // 读取中断寄存器的值
unsigned stat = readl(host->base + MMC_STAT); // 读取状态寄存器的值
handled |= pxamci_cmd_done(host, stat);
if (ireg & DATA_TRAN_DONE)
handled |= pxamci_data_done(host, stat);
if (ireg & SDIO_INT) {
mmc_signal_sdio_irq(host->mmc);
}
}
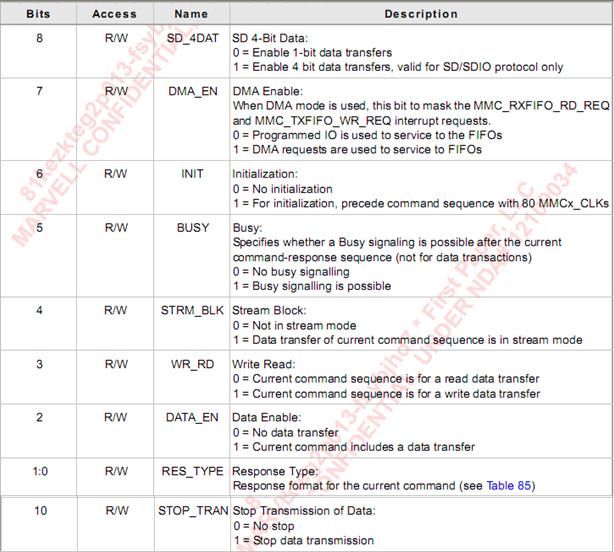
当调用(*request),即host->ops->request(host, mrq),即上文中的pxamci_request()后,控制器与SD卡之间开始进行一次指令或数据传输,通信完毕后,主控芯片将产生一个内部中断,以告知此次指令或数据传输完毕。这个中断的具体值将保存在一个名为MMC_I_REG的中断寄存器中以供读取,中断寄存器MMC_I_REG中相关描述如下,

-> pxamci_cmd_done 收到结束指令的内部中断信号,主控制器从SD卡那里得到response,结束这次指令传输
这里需要注意,寄存器MMC_RES里已经存放了来自SD卡发送过来的response,以供读取。
{
struct mmc_command *cmd = host->cmd;
cmd->error = -ETIMEDOUT;
} else if (stat & STAT_RES_CRC_ERR && cmd->flags & MMC_RSP_CRC) {
if (host->data && !cmd->error) {
pxamci_enable_irq(host, DATA_TRAN_DONE);
} else {
pxamci_finish_request(host, host->mrq); // 结束一次传输,清空主控制器中的指令和数据
}
}
{
struct mmc_data *data = host->data;
dma_unmap_sg(mmc_dev(host->mmc), data->sg, host->dma_len, host->dma_dir);
data->error = -ETIMEDOUT;
else if (stat & (STAT_CRC_READ_ERROR|STAT_CRC_WRITE_ERROR))
data->error = -EILSEQ;
data->bytes_xfered = data->blocks * data->blksz; // 数据传输量=块的数量*每个块的大小(一般为512字节)
else
data->bytes_xfered = 0;
pxamci_finish_request(host, host->mrq);
... ...
static void pxamci_finish_request(struct pxamci_host *host, struct mmc_request *mrq)
{
host->mrq = NULL;
host->cmd = NULL;
host->data = NULL;
mmc_request_done(host->mmc, mrq);
set_mmc_cken(host, 0);
unset_dvfm_constraint();
}
void mmc_request_done(struct mmc_host *host, struct mmc_request *mrq)
{
if (mrq->done)
mrq->done(mrq);
}
{
DECLARE_COMPLETION_ONSTACK(complete);
mrq->done = mmc_wait_done;
}
{
complete(mrq->done_data);
}
host->pdata->init(&pdev->dev, pxamci_detect_irq, mmc);
{
... ...
static irqreturn_t pxamci_detect_irq(int irq, void *devid)
{
struct pxamci_host *host = mmc_priv(devid);
return IRQ_HANDLED;
}
Linux在内核源码的drivers/mmc/core文件夹下为我们的提供了一系列SD卡的接口服务函数。可以查看Makefile如下,
可见,core文件夹下有针对总线的服务bus.c,针对主控制器的服务host.c,针对SD卡的服务sd.c, sd_ops.c等等。
其中,最为核心的一个函数便是之前提到的位于core.c的mmc_rescan,概括来讲,主要完成两项任务,即
- 扫描SD总线,插入SD卡
- 扫描SD总线,拔出SD卡
3.1 插入SD卡
插入SD卡,主控制器产生中断,进入中断处理函数,处理工作队列,执行mmc_rescan。
void mmc_rescan(struct work_struct *work)
{
struct mmc_host *host = container_of(work, struct mmc_host, detect.work); // 得到mmc_host的数据
/*
* First we search for SDIO...
*/
err = mmc_send_io_op_cond(host, 0, &ocr);
if (!err) {
if (mmc_attach_sdio(host, ocr))
mmc_power_off(host);
goto out;
}
/*
* ...then normal SD...
*/
err = mmc_send_app_op_cond(host, 0, &ocr);
if (!err) {
if (mmc_attach_sd(host, ocr))
mmc_power_off(host);
goto out;
}
/*
* ...and finally MMC.
*/
err = mmc_send_op_cond(host, 0, &ocr);
if (!err) {
if (mmc_attach_mmc(host, ocr))
mmc_power_off(host);
goto out;
}
... ...
}
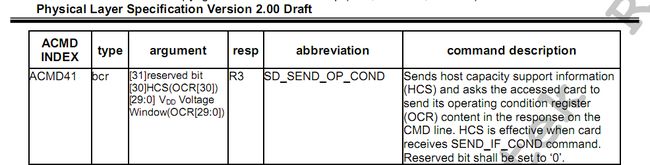
插入SD卡,mmc_rescan扫描SD总线上是否存在SD卡,具体的实现方法就是通过向SD卡上电,看是否能成功,以普通SD卡为例,为普通SD卡上电的函数mmc_send_app_op_cond(host, 0, &ocr);如果上电成功,则返回0,即执行if()里的mmc_attach_sd()进行总线与SD卡的绑定。如果上电失败,则返回非0值,跳过if(),尝试其他上电的方法。那么,上电方法究竟有何不同呢?具体看看mmc_send_app_op_cond()的实现过程,
int mmc_send_app_op_cond(struct mmc_host *host, u32 ocr, u32 *rocr)
{
struct mmc_command cmd;
cmd.opcode = SD_APP_OP_COND; /* #define SD_APP_OP_COND 41 */
mmc_wait_for_app_cmd(host, NULL, &cmd, MMC_CMD_RETRIES);
... ...
}
int mmc_wait_for_app_cmd(struct mmc_host *host, struct mmc_card *card, struct mmc_command *cmd, int retries)
{
mmc_app_cmd(host, card); /* #define MMC_APP_CMD 55 */
mrq.cmd = cmd;
cmd->data = NULL;
mmc_wait_for_req(host, &mrq);
... ...
}
这里的指令SD_APP_OP_COND只有SD2.0的协议支持,也就是说,只有普通SD卡支持,所以也只有普通SD卡能够成功上电。

如果上电成功,就开始进行总线与SD卡的绑定,通过mmc_attach_sd(),绑定过程可分为四步,
- 注册SD总线上的操作函数 - struct mmc_bus_ops mmc_sd_ops
- 设置主控制器的时钟和总线方式 - 通过回调函数host->ops->set_ios();
- 启动SD卡 - 根据协议,完成SD卡启动的各个步骤
- 注册SD卡设备驱动
3.1.1 注册总线上的操作函数
int mmc_attach_sd(struct mmc_host *host, u32 ocr)
{
mmc_sd_attach_bus_ops(host);
... ...
}
static void mmc_sd_attach_bus_ops(struct mmc_host *host)
{
const struct mmc_bus_ops *bus_ops;
bus_ops = &mmc_sd_ops;
mmc_attach_bus(host, bus_ops);
}
void mmc_attach_bus(struct mmc_host *host, const struct mmc_bus_ops *ops)
{
host->bus_ops = ops;
host->bus_refs = 1;
host->bus_dead = 0;
}
static const struct mmc_bus_ops mmc_sd_ops = {
.remove = mmc_sd_remove, // 拔出SD卡的操作函数
.detect = mmc_sd_detect, // 探测SD卡的操作函数
.suspend = NULL,
.resume = NULL,
.power_restore = mmc_sd_power_restore, // 重新启动SD卡的操作函数
};
这里的mmc_sd_detect和mmc_sd_remove就是拔出SD卡所需要用到的函数,下文将详细讨论。这里需要注意的是,插入SD卡的时候,并不执行mmc_sd_detect和mmc_sd_remove这两个函数,但是会注册它们,也就是说,这两个函数的功能已经实现,将来可以使用。
3.1.2 设置时钟和总线
int mmc_attach_sd(struct mmc_host *host, u32 ocr)
{
host->ocr = mmc_select_voltage(host, ocr);
... ...
}
u32 mmc_select_voltage(struct mmc_host *host, u32 ocr)
{
mmc_set_ios(host);
... ...
}
static inline void mmc_set_ios(struct mmc_host *host)
{
struct mmc_ios *ios = &host->ios;
host->ops->set_ios(host, ios); // 设置主控制器时钟和总线的回调函数,具体实现由主控制器驱动完成
}
从这里可以体会到回调函数的精髓:协议层里利用回调函数为所有满足该协议的设备提供统一的接口,而具体实现由底层不同的设备驱动各自完成。注意到,之所以要定义一些放之四海而皆准的公用的类,比如struct mmc_host,就是需要通过struct mmc_host *host指针作为形参传到协议层所提供的接口函数中,从而得以调用。
3.1.3 启动SD卡
int mmc_attach_sd(struct mmc_host *host, u32 ocr)
{
mmc_sd_init_card(host, host->ocr, NULL);
... ...
}
mmc_sd_init_card主要完成以下任务,
- SD卡的启动过程
- 得到寄存器CID, CSD, SCR, RCA的数据
- 其他操作比如切换到高速模式,初始化card
static int mmc_sd_init_card(struct mmc_host *host, u32 ocr, struct mmc_card *oldcard)
{
/* SD卡的启动过程 */
mmc_go_idle(host);
mmc_send_if_cond(host, ocr);
mmc_send_app_op_cond(host, ocr, NULL);
mmc_all_send_cid(host, cid);
mmc_send_relative_addr(host, &card->rca);
/* 得到寄存器CID, CSD, SCR的数据 */
mmc_send_csd(card, card->raw_csd);
mmc_decode_csd(card);
mmc_decode_cid(card);
mmc_app_send_scr(card, card->raw_scr);
mmc_decode_scr(card);
/* 其它操作 */
mmc_alloc_card(host, &sd_type);
mmc_select_card(card);
mmc_read_switch(card);
mmc_switch_hs(card);
... ...
}
1) SD卡的启动过程
根据SD2.0协议,SD卡的状态可分为两种模式:卡识别模式(card-identification mode)和数据传输模式(data-transfer mode)。这里,我们关注启动SD卡的卡识别模式。
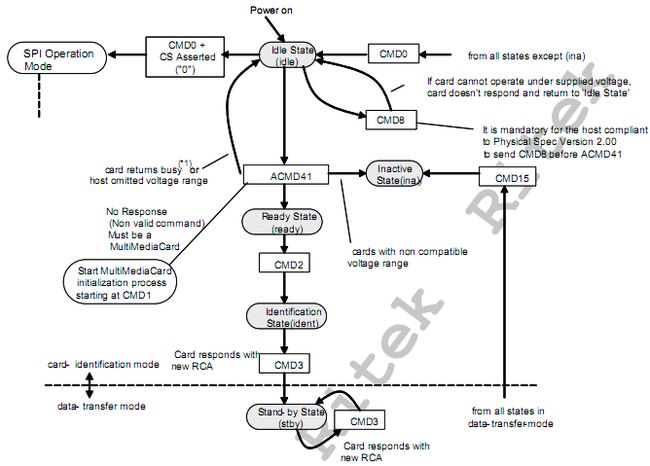
结合代码,
mmc_go_idle(host); CMD0
Idle State
mmc_send_if_cond(host, ocr); CMD8
mmc_send_app_op_cond(host, ocr, NULL); ACMD41
Ready State
mmc_all_send_cid(host, cid); CMD2
Identification State
mmc_send_relative_addr(host, &card->rca); CMD3
Stand-by State
2) 寄存器CID, CSD, SCR, RCA
-> 发送指令并得到寄存器的值
当主控制器向SD卡发送cmd指令,比如mmc_send_cid(card, card->raw_cid),请求得到SD卡CID寄存器的值,当主控制器发送cmd完成后,芯片产生一个内部中断,处理结束cmd的中断函数,之后得到来自SD卡的response,即CID寄存器的值,存放于host->cmd->resp[i]中。关于内部中断处理,参看上文的中断一节里的 mmc_wait_for_cmd()。
mmc_send_cid(card, card->raw_cid);这个函数发送了接收CSD寄存器的请求,并且得到了来自SD卡的CSD寄存器的值。
int mmc_send_cid(struct mmc_card *card, u32 *cid)
{
return mmc_send_cxd_native(card->host, card->rca << 16, cid, MMC_SEND_CID);
}
static int mmc_send_cxd_native(struct mmc_host *host, u32 arg, u32 *cxd, int opcode)
{
cmd.opcode = opcode;
cmd.arg = arg;
cmd.flags = MMC_RSP_R2 | MMC_CMD_AC;
mmc_wait_for_cmd(host, &cmd, MMC_CMD_RETRIES);
memcpy(cxd, cmd.resp, sizeof(u32) * 4); // 得到response赋给cxd,即card->raw_cid
... ...
}
-> 解析寄存器的值
为什么要解析?先来看看寄存器CID在SD卡协议里的定义,它是一个128位的寄存器,存放了关于这块SD卡的基本信息,就像自己的身份证。通过mmc_send_cid()将这个寄存器的数值赋给了card->raw_cid (定义 u32 raw_cid[4];) ,为了方便得到具体某一个信息,协议层为我们解析了寄存器里的域,并赋给card->cid,比如厂商名称,就可以通过card->cid.manfid直接读取到。

static int mmc_decode_cid(struct mmc_card *card)
{
u32 *resp = card->raw_cid;
card->cid.manfid = UNSTUFF_BITS(resp, 120, 8);
card->cid.oemid = UNSTUFF_BITS(resp, 104, 16);
card->cid.prod_name[0] = UNSTUFF_BITS(resp, 96, 8);
card->cid.prod_name[1] = UNSTUFF_BITS(resp, 88, 8);
card->cid.prod_name[2] = UNSTUFF_BITS(resp, 80, 8);
card->cid.prod_name[3] = UNSTUFF_BITS(resp, 72, 8);
card->cid.prod_name[4] = UNSTUFF_BITS(resp, 64, 8);
card->cid.prod_name[5] = UNSTUFF_BITS(resp, 56, 8);
card->cid.serial = UNSTUFF_BITS(resp, 16, 32);
card->cid.month = UNSTUFF_BITS(resp, 12, 4);
card->cid.year = UNSTUFF_BITS(resp, 8, 4) + 1997;
return 0;
}
3.1.4 注册SD卡设备驱动
int mmc_attach_sd(struct mmc_host *host, u32 ocr)
{
/* mmc_alloc_card(host, &sd_type); 在mmc_sd_init_card()已完成 */
mmc_add_card(host->card);
... ...
}
上文已经提到,设备驱动程序都会通过alloc_xxx()和add_xxx()两步来注册驱动,其实质是调用/drivers/base/core.c里的device_initialize()和device_add(),device_add()完成建立kobject,sys文件,发送uevent,等工作。
3.2 拔出SD卡
void mmc_rescan(struct work_struct *work)
{
struct mmc_host *host = container_of(work, struct mmc_host, detect.work);
mmc_bus_get(host);
/* if there is a card registered, check whether it is still present */
if ((host->bus_ops != NULL) && host->bus_ops->detect && !host->bus_dead)
host->bus_ops->detect(host);
mmc_bus_put(host);
... ...
}
这里的mmc_bus_get/put(),为SD总线加上一个自旋锁,规定同时只能有一个线程在SD总线上操作。
3.2.1 bus_ops->detect()
mmc_rescan()扫描SD总线,如果发现host->ops上赋了值,即之前已有SD卡注册过,就执行bus_ops->detect()操作去探测SD总线上是否还存在SD卡,如果不存在了,就执行bus_ops->remove()拔出SD卡。之前已经提到,这个bus_ops->detect()已在mmc_attach_sd()注册完成了。
static void mmc_sd_detect(struct mmc_host *host)
{
mmc_claim_host(host);
/*
* Just check if our card has been removed.
*/
err = mmc_send_status(host->card, NULL);
mmc_release_host(host);
if (err) {
mmc_sd_remove(host);
mmc_claim_host(host);
mmc_detach_bus(host);
mmc_release_host(host);
}
}
这里的mmc_claim_host(host)通过set_current_state(TASK_RUNNING);将当前进程设置为正在运行进程。
mmc_send_status()发送得到SD卡状态的请求,如果未能得到状态数据,则执行mmc_sd_remove(host)拔出SD卡。
int mmc_send_status(struct mmc_card *card, u32 *status)
{
struct mmc_command cmd;
cmd.opcode = MMC_SEND_STATUS; /* #define MMC_SEND_STATUS 13 */
cmd.arg = card->rca << 16;
cmd.flags = MMC_RSP_SPI_R2 | MMC_RSP_R1 | MMC_CMD_AC;
err = mmc_wait_for_cmd(card->host, &cmd, MMC_CMD_RETRIES);
if (err)
return err; // 接收来自SD卡的response失败,即没有发现SD卡
if (status)
*status = cmd.resp[0];
return 0;
}
主控制器发送命令CMD13,要求得到SD卡的状态寄存器CSR和SSR。
![]()
SD协议规定,状态寄存器CSR是必须的,这个32位寄存器作为R1的一个域返回给主控制器,

状态寄存器SSR作为扩充功能,具体参考SD2.0协议。

3.2.2 bus_ops->remove()
拔出SD卡,其实就是注册SD卡驱动的反操作,实质就是执行device_del()和device_put()。
static void mmc_sd_remove(struct mmc_host *host)
{
mmc_remove_card(host->card);
host->card = NULL;
}
void mmc_remove_card(struct mmc_card *card)
{
if (mmc_card_present(card))
device_del(&card->dev);
put_device(&card->dev);
}
4. 块设备
首先,必须知道为什么要用到块设备。在linux下,SD卡通过block块的方式(以512字节为最小单位)进行数据传输,它必须遵从块设备架构。在linux块设备层,I/O调度者通过请求队列机制负责对块数据的处理。

SD卡子系统分为三层,主设备层,协议层和块设备层。块设备驱动位于/drivers/mmc/card/block.c,主要完成两个任务,
-
建立设备节点
-
通过请求队列机制进行数据传输
插入SD卡,注册驱动成功,那么在开发板的目录/dev/block下会出现SD卡的设备节点。 
179为主设备号,定义于include/linux/major.h #define MMC_BLOCK_MAJOR 179
179:0代表这块SD卡的设备节点mmcblk0,179:1代表这块SD卡的第一个分区mmcblk0p1,即主分区,如果有第二个分区,那就是179:2,最多可以有7个分区,即179:1~179:7(定义于block.c alloc_disk(1 << 3);)。不过,SD卡一般只有一个分区。如果有第二块SD卡插入,将会建立设备节点mmcblk1(179:8)和mmcblk1p1(179:9)。
下面通过对块设备驱动block.c的分析,看看SD卡是如何在块设备层建立节点和传输数据的。
4.1 数据结构
每个驱动都会有一个数据结构。幸运的是,我们SD卡块设备驱动的数据结构相对简单,在mmc_blk_data里,主要有两个成员,struct gendisk *disk和struct mmc_queue queue。
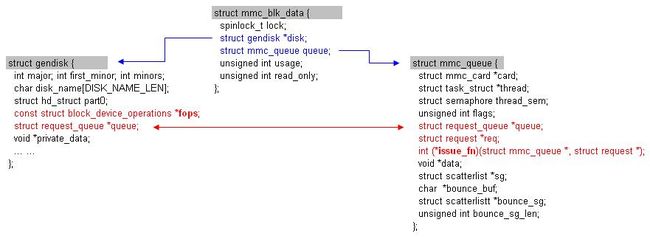
1) struct gendisk 是general disk的缩写,代表个通用的块设备,其中包括块设备的主分区结构struct hd_struct part0, 块设备的行为函数struct block_device_operations *fops,以及请求队列struct request_queue *queue等。
2) struct request_queue 存放所有I/O调度的算法。
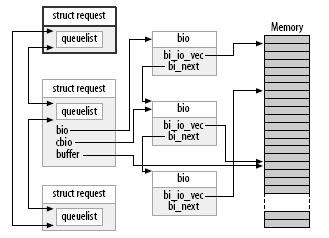
3) struct request 请求是I/O调度者调度的对象,其中的结构struct bio是整个请求队列的核心,具体内容请参看LDD3。
4.2 块设备驱动
首先浏览一下源码,
static int __init mmc_blk_init(void)
{
register_blkdev(MMC_BLOCK_MAJOR, "mmc"); // 注册主设备号(若注册成功,/proc/devices的块设备下会出现mmc)
mmc_register_driver(&mmc_driver);
return 0;
}
static struct mmc_driver mmc_driver = {
.drv = {
.name = "mmcblk",
},
.probe = mmc_blk_probe,
.remove = mmc_blk_remove,
.suspend = mmc_blk_suspend,
.resume = mmc_blk_resume,
};
static int mmc_blk_probe(struct mmc_card *card)
{
struct mmc_blk_data *md;
md = mmc_blk_alloc(card);
mmc_blk_set_blksize(md, card);
mmc_set_drvdata(card, md);
add_disk(md->disk);
return 0;
... ...
}
4.2.1 设备驱动的初始化函数
仍然可以将驱动程序的初始化mmc_blk_probe(struct mmc_card *card)归纳为以下内容,
- 初始化设备驱动的数据结构mmc_blk_data,并挂载到card->dev.driver_data
-
实现块备驱动的功能函数struct block_device_operations *fops
-
注册设备,即注册kobject,建立sys文件,发送uevent等
- 其他需求,如mmc_blk_set_blksize(md, card);
1) 初始化mmc_blk_data
static struct mmc_blk_data *mmc_blk_alloc(struct mmc_card *card)
{
struct mmc_blk_data *md;
md = kzalloc(sizeof(struct mmc_blk_data), GFP_KERNEL);
md->read_only = mmc_blk_readonly(card);
md->disk = alloc_disk(1 << 3); // 分配了8个可用设备
spin_lock_init(&md->lock);
md->usage = 1;
ret = mmc_init_queue(&md->queue, card, &md->lock);
md->queue.issue_fn = mmc_blk_issue_rq;
md->queue.data = md;
md->disk->major = MMC_BLOCK_MAJOR;
md->disk->first_minor = devidx << MMC_SHIFT;
md->disk->fops = &mmc_bdops;
md->disk->private_data = md;
md->disk->queue = md->queue.queue;
md->disk->driverfs_dev = &card->dev;
blk_queue_logical_block_size(md->queue.queue, 512);
... ...
return md;
}
完成初始化后,通过mmc_set_drvdata(card, md);将数据挂载到card->dev.driver_data下。
2) 功能函数
static const struct block_device_operations mmc_bdops = {
.open = mmc_blk_open,
.release = mmc_blk_release,
.getgeo = mmc_blk_getgeo,
.owner = THIS_MODULE,
};
static int mmc_blk_open(struct block_device *bdev, fmode_t mode)
{
struct mmc_blk_data *md = mmc_blk_get(bdev->bd_disk);
... ...
}
struct block_device {
dev_t bd_dev; /* it's a search key */
struct inode * bd_inode; /* will die */
struct super_block * bd_super;
... ...
};
与字符驱动类似,通过dev_t和inode找到设备。
3) 注册驱动
void add_disk(struct gendisk *disk)
{
blk_register_region(disk_devt(disk), disk->minors, NULL, exact_match, exact_lock, disk);
register_disk(disk);
blk_register_queue(disk);
... ...
}
blk_register_region()在linux中实现了一种利用哈希表管理设备号的机制。
register_disk()对应alloc_disk(),完成对块设备的注册,其实质是通过register_disk()->blkdev_get()->__blkdev_get()->rescan_partitions()->add_partitions()添加分区,建立设备节点。
blk_register_queue()对应blk_init_queue()完成对请求队列的注册,其实质是通过elv_register_queue()注册请求队列的算法。
关于块设备更为具体的代码分析可参看linux那些事。
4.2.2 请求队列
mmc_init_queue申请并初始化一个请求队列,开启负责处理这个请求队列的守护进程。
int mmc_init_queue(struct mmc_queue *mq, struct mmc_card *card, spinlock_t *lock)
{
struct mmc_host *host = card->host;
mq->card = card;
mq->queue = blk_init_queue(mmc_request, lock);
mq->queue->queuedata = mq;
mq->req = NULL;
blk_queue_prep_rq(mq->queue, mmc_prep_request); // 注册mmc_prep_request算法
blk_queue_ordered(mq->queue, QUEUE_ORDERED_DRAIN, NULL); //注册ordered算法
mq->thread = kthread_run(mmc_queue_thread, mq, "mmcqd");
... ...
}
1) mmc_request
它是处理SD卡通用的申请请求的回调函数,或者说是SD卡申请请求的算法。当CPU处于not busy状态,会寻找一个请求,并试图执行它。
/* /drivers/mmc/card/queue.c */
/*
* Generic MMC request handler. This is called for any queue on a
* particular host. When the host is not busy, we look for a request
* on any queue on this host, and attempt to issue it. This may
* not be the queue we were asked to process.
*/
static void mmc_request(struct request_queue *q)
{
struct mmc_queue *mq = q->queuedata;
struct request *req;
if (!mq) {
while ((req = blk_fetch_request(q)) != NULL) { // 寻找来自请求队列的一个请求req
req->cmd_flags |= REQ_QUIET;
__blk_end_request_all(req, -EIO);
}
return;
}
if (!mq->req)
wake_up_process(mq->thread); // 如果队列里没有请求req,唤醒守护进程
}
这里我们需要关注这个处理该SD卡请求队列的算法是何时申请的,也就是何时会去申请请求,何时会去唤醒内核线程。
用到回调函数q->request_fn有三处
-
块设备驱动注册请求队列blk_register_queue()
-
驱动程序出错,清空请求队列mmc_cleanup_queue()
-
实现请求队列机制的blk_fetch_request内部本身
blk_fetch_request()->blk_peek_request()->__elv_next_request()->blk_do_ordered()->...->q->request_fn
我们不必深究所谓的电梯算法,只要知道,它是使数据得以高效通信的一种算法,算法自身决定何时去唤醒守护进程处理请求。
2) blk_init_queue()
如果一个块设备希望使用一个标准的请求处理步骤,那就必须使用blk_init_queue()。这个函数注册了q->request_fn(这里就是mmc_request),并初始化请求队列的数据结构struct request_queue。
/*
* are requests on the queue that need to be processed. If the device
* supports plugging, then @rfn may not be called immediately when requests
* are available on the queue, but may be called at some time later instead.
*/
struct request_queue *blk_init_queue(request_fn_proc *rfn, spinlock_t *lock)
{
return blk_init_queue_node(rfn, lock, -1);
}
其中的rfn就是请求队列的一个算法,即这里的mmc_request。
struct request_queue *blk_init_queue_node(request_fn_proc *rfn, spinlock_t *lock, int node_id)
{
struct request_queue *q = blk_alloc_queue_node(GFP_KERNEL, node_id);
q->request_fn = rfn;
q->prep_rq_fn = NULL;
q->unplug_fn = generic_unplug_device;
q->queue_flags = QUEUE_FLAG_DEFAULT;
q->queue_lock = lock;
blk_queue_make_request(q, __make_request);
if (!elevator_init(q, NULL)) {
blk_queue_congestion_threshold(q);
return q;
}
... ...
}
3) kthead_run()
注意到mmc_init_queue这个函数的最后,创建并运行一个名为mmcqd的线程,顾名思意,mmc queue deamon它是一个SD卡的处理请求队列的守护进程,或者说内核线程,当系统注册SD卡块设备驱动时,就通过mmc_init_queue()开启了这个内核线程。
4) mmc_queue_thread
看看这个内核线程做了些什么,
static int mmc_queue_thread(void *d)
{
struct mmc_queue *mq = d;
struct request_queue *q = mq->queue;
current->flags |= PF_MEMALLOC;
down(&mq->thread_sem);
do {
struct request *req = NULL;
spin_lock_irq(q->queue_lock);
set_current_state(TASK_INTERRUPTIBLE);
if (!blk_queue_plugged(q))
req = blk_fetch_request(q);
mq->req = req;
spin_unlock_irq(q->queue_lock);
if (!req) {
if (kthread_should_stop()) {
set_current_state(TASK_RUNNING);
break;
}
up(&mq->thread_sem);
schedule();
down(&mq->thread_sem);
continue;
}
set_current_state(TASK_RUNNING);
mq->issue_fn(mq, req);
} while (1);
up(&mq->thread_sem);
return 0;
}
首先,这个守护进程是一个while(1)死循环,如果没有特殊要求,即kthread_should_stop()指定要把这个内核线程终止掉,那么它将从系统启动开始一直负责处理SD卡的请求队列。
在循环内部,内核线程首先通过set_current_state(TASK_INTERRUPTIBLE);设置当前线程为可打断的等待线程,进入睡眠状态,等待其他线程唤醒它,这里唤醒它的就是处理SD卡请求的mmc_request,当mq->req为空,即当前没有请求正在处理,则通过 wake_up_process(mq->thread);唤醒内核线程,接着该线程尝试从请求队列里得到一个请求req,
-> 如果没有请求,则调用schedule()交出cpu的使用权让其自由调度,等到系统空闲时,再次得到cpu控制权,并且执行continue;退出当前循环,重新开始新的循环。
-> 如果得到了一个请求,则通过set_current_state(TASK_RUNNING);将该内核线程设置为当前正在运行的进程,并调用issue_fn(),即mmc_blk_issue_rq,处理这个请求,实现主控制器与SD卡的数据传输。
5) issue_fn
驱动初始化函数probe()里的mmc_blk_alloc()里注册了这个回调函数,md->queue.issue_fn = mmc_blk_issue_rq;
这个函数将req里的成员解析成为mmc_blk_request里的指令和数据,即mmc_command和mmc_data,然后通过mmc_wait_for_req()最终实现主控制器与SD卡间的通信。
struct mmc_blk_request {
struct mmc_request mrq;
struct mmc_command cmd;
struct mmc_command stop;
struct mmc_data data;
};
static int mmc_blk_issue_rq(struct mmc_queue *mq, struct request *req)
{
struct mmc_blk_data *md = mq->data;
struct mmc_card *card = md->queue.card;
struct mmc_blk_request brq;
mmc_claim_host(card->host);
do {
brq.mrq.cmd = &brq.cmd;
brq.mrq.data = &brq.data;
brq.cmd.arg = blk_rq_pos(req); // 解析指令的参数
if (!mmc_card_blockaddr(card))
brq.cmd.arg <<= 9;
brq.cmd.flags = MMC_RSP_SPI_R1 | MMC_RSP_R1 | MMC_CMD_ADTC;
brq.data.blksz = 512;
brq.stop.opcode = MMC_STOP_TRANSMISSION;
brq.stop.arg = 0;
brq.stop.flags = MMC_RSP_SPI_R1B | MMC_RSP_R1B | MMC_CMD_AC;
brq.data.blocks = blk_rq_sectors(req); // 解析数据块大小
if (rq_data_dir(req) == READ) { // 解析传输数据方向
brq.cmd.opcode = MMC_READ_MULTIPLE_BLOCK;
brq.data.flags |= MMC_DATA_READ;
} else {
brq.cmd.opcode = MMC_WRITE_MULTIPLE_BLOCK;
brq.data.flags |= MMC_DATA_WRITE;
}
mmc_wait_for_req(card->host, &brq.mrq); // 调用core协议层提供的接口函数,实现数据间通信
... ...
}
mmc_release_host(card->host);
}