学习OpenCV范例(二十)——角点检测算法
本次范例讲的都是检测角点的算法,在这里我们会讲到,harris角点检测,Shi-Tomasi角点检测,FAST角点检测,尺度不变surf检测,尺度不变sift检测,特征点的描述。由于是算法问题,相对来说会比较复杂,而且都是一些比较经典的算法,如果只是纯粹的想要用算法来实现一些功能,那么只要调用OpenCV几个简单的函数就可以了,但是如果想学习一下理论知识,为以后自己的研究有所帮助,而且想理解函数的参数如何改变,那么还是得硬着头皮去看看原理吧,本人也是看了挺久的算法原理,但是还是没有完全理解透,所以在这里只是贴出我看过的比较有用的博客,还有一些自己编译的代码和实现结果,记录一下这个过程,方便以后可以进一步的研究。
1、原理
Harris:Opencv学习笔记(五)Harris角点检测
Shi-Tomasi:【OpenCV】角点检测:Harris角点及Shi-Tomasi角点检测
FAST:OpenCV学习笔记(四十六)——FAST特征点检测features2D
SIFT:【OpenCV】SIFT原理与源码分析
特征点检测学习_1(sift算法)
SURF: 特征点检测学习_2(surf算法)
2、代码实现
由于代码量较大,所以只是贴出代码的一部分,如果想要整体代码,可以从下面的链接中找到
http://download.csdn.net/detail/chenjiazhou12/7129327
①、harris角点检测
//计算角点响应函数以及非最大值抑制
void detect(const Mat &image){
//opencv自带的角点响应函数计算函数
cornerHarris (image,cornerStrength,neighbourhood,aperture,k);
double minStrength;
//计算最大最小响应值
minMaxLoc (cornerStrength,&minStrength,&maxStrength);
Mat dilated;
//默认3*3核膨胀,膨胀之后,除了局部最大值点和原来相同,其它非局部最大值点被
//3*3邻域内的最大值点取代
dilate (cornerStrength,dilated,cv::Mat());
//与原图相比,只剩下和原图值相同的点,这些点都是局部最大值点,保存到localMax
compare(cornerStrength,dilated,localMax,cv::CMP_EQ);
}
cornerHarris
功能:Harris角点检测
结构:
void cornerHarris(InputArray src, OutputArray dst, int blockSize, int apertureSize, double k, int borderType=BORDER_DEFAULT )
src :8位或者32位浮点数单通道图像
dst:保存Harris检测结果的图像,32位单通道,和src有同样的size
blockSize :邻域大小,相邻像素的尺寸(见关于 cornerEigenValsAndVecs() 的讨论)
apertureSize :滤波器的孔径大小
k :harris 检测器的自由参数
boderType :插值类型
compare
功能:两个数组之间或者一个数组和一个常数之间的比较
结构:
void compare(InputArray src1, InputArray src2, OutputArray dst, int cmpop)
src1 :第一个数组或者标量,如果是数组,必须是单通道数组。
src2 :第二个数组或者标量,如果是数组,必须是单通道数组。
dst :输出数组,和输入数组有同样的size和type=CV_8UC1
cmpop :
标志指明了元素之间的对比关系
CMP_EQ src1 相等 src2.
CMP_EQ src1 相等 src2.
CMP_GT src1 大于 src2.
CMP_GE src1 大于或等于 src2.
CMP_LT src1 小于 src2.
CMP_LE src1 小于或等于 src2.
CMP_NE src1 不等于 src2.
CMP_GE src1 大于或等于 src2.
CMP_LT src1 小于 src2.
CMP_LE src1 小于或等于 src2.
CMP_NE src1 不等于 src2.
如果对比结果为true,那么输出数组对应元素的值为255,否则为0
//获取角点图
Mat getCornerMap(double qualityLevel) {
Mat cornerMap;
// 根据角点响应最大值计算阈值
thresholdvalue= qualityLevel*maxStrength;
threshold(cornerStrength,cornerTh,
thresholdvalue,255,cv::THRESH_BINARY);
// 转为8-bit图
cornerTh.convertTo(cornerMap,CV_8U);
// 和局部最大值图与,剩下角点局部最大值图,即:完成非最大值抑制
bitwise_and(cornerMap,localMax,cornerMap);
return cornerMap;
}
bitwise_and
功能:计算两个数组或数组和常量之间与的关系
结构:
void bitwise_and(InputArray src1, InputArray src2, OutputArray dst, InputArray mask=noArray())
src1 :第一个输入的数组或常量
src2 :第二个输入的数组或常量
dst :输出数组,和输入数组有同样的size和type
mask :可选择的操作掩码,为8位单通道数组,指定了输出数组哪些元素可以被改变,哪些不可以
操作过程为:
如果为多通道数组,每个通道单独处理
②、Shi-Tomasi检测
void goodFeaturesDetect()
{
// 改进的harris角点检测方法
vector<Point> corners;
goodFeaturesToTrack(image,corners,
200,
//角点最大数目
0.01,
// 质量等级,这里是0.01*max(min(e1,e2)),e1,e2是harris矩阵的特征值
10);
// 两个角点之间的距离容忍度
harris().drawOnImage(image,corners);//标记角点
imshow (winname,image);
}
goodFeaturesToTrack
功能:确定图像的强角点
结构:
void goodFeaturesToTrack(InputArray image, OutputArray corners, int maxCorners, double qualityLevel, double minDistance, InputArray mask=noArray(), int blockSize=3, bool useHarrisDetector=false, double k=0.04 )
image :输入8位或32为单通道图像
corners :输出检测到的角点
maxCorners :返回的角点的最大值,如果设置的值比检测到的值大,那就全部返回
qualityLevel :最大最小特征值的乘法因子。定义可接受图像角点的最小质量因子
minDistance :限制因子,两个角点之间的最小距离,使用 Euclidian 距离
mask :ROI:感兴趣区域。函数在ROI中计算角点,如果 mask 为 NULL,则选择整个图像。 必须为单通道的灰度图,大小与输入图像相同。mask对应的点不为0,表示计算该点。
blockSize :邻域大小,相邻像素的尺寸(见关于 cornerEigenValsAndVecs() 的讨论)
useHarrisDetector :是否使用Harris检测器 (见关于 cornerHarris() 或 cornerMinEigenVal()的讨论).
k :Harris检测器的自由参数
1、该函数在原图像的每一个像素点使用cornerMinEigenVal()或者cornerHarris()来计算角点
2、对检测到的角点进行非极大值抑制(在3*3的领域内极大值被保留)
3、对检测到的角点进行阈值处理,小于阈值,则被删除
4、对最终得到的角点进行降序排序
5、删除离强角点距离比minDistance近的角点
2、对检测到的角点进行非极大值抑制(在3*3的领域内极大值被保留)
3、对检测到的角点进行阈值处理,小于阈值,则被删除
4、对最终得到的角点进行降序排序
5、删除离强角点距离比minDistance近的角点
③、FAST检测
void fastDetect()
{
//快速角点检测
vector<KeyPoint> keypoints;
FastFeatureDetector fast(40,true);
fast.detect (image,keypoints);
drawKeypoints (image,keypoints,image,Scalar::all(255),DrawMatchesFlags::DRAW_OVER_OUTIMG);
imshow (winname,image);
}
这个类是FeatureDetector类继承过来的
构造函数
FastFeatureDetector( int threshold=1, bool nonmaxSuppression=true );
threshold:检测阈值
nonmaxSuppression:非极大值抑制
void FeatureDetector::detect(const Mat& image, vector<KeyPoint>& keypoints, const Mat& mask=Mat() ) const
void FeatureDetector::detect(const vector<Mat>& images, vector<vector<KeyPoint>>& keypoints, const vector<Mat>& masks=vector<Mat>() ) const
image :输入图片
images :输入图片组
keypoints :第一个为检测到的keypoints,第二个为检测到的keypoints组
mask :可选的操作掩码,指定哪些keypoints,必须是8位二值化有非零元素的感兴趣区域
masks :多个操作掩码,masks[i]对应images[i]
drawKeypoints
功能:绘制特征关键点.
结构:
void drawKeypoints(const Mat& image, const vector<KeyPoint>& keypoints, Mat& outImg, const Scalar& color=Scalar::all(-1), int flags=DrawMatchesFlags::DEFAULT )
image :原图片
keypoints :得到的keypoints
outImg :输出图片,它的内容依赖于flags的值
color :keypoints的颜色
flags :标志画在输出图像的特征,flags是由DrawMatchesFlags定义的
struct DrawMatchesFlags
{
enum
{
DEFAULT = 0, // 会创建一个输出矩阵,两张源文件,匹配结果,
// 和keypoints将会被绘制在输出图像中
// 对于每一个keypoints点,只有中心被绘制,
// 不绘制半径和方向
DRAW_OVER_OUTIMG = 1, // 不创建输出图像,匹配结构绘制在已经存在的输出图像中
NOT_DRAW_SINGLE_POINTS = 2, // 单独的keypoints点不被绘制
DRAW_RICH_KEYPOINTS = 4 // 对于每一个keypoints点,半径和方向都被绘制
};
};
④、SIFT检测
void siftDetect()
{
vector<KeyPoint> keypoints;
SiftFeatureDetector sift(0.03,10);
sift.detect(image,keypoints);
drawKeypoints(image,keypoints,image,Scalar(255,255,255),DrawMatchesFlags::DRAW_RICH_KEYPOINTS);
imshow (winname,image);
}
SiftFeatureDetector
结构:
SiftFeatureDetector( double threshold, double edgeThreshold,
int nOctaves=SIFT::CommonParams::DEFAULT_NOCTAVES,
int nOctaveLayers=SIFT::CommonParams::DEFAULT_NOCTAVE_LAYERS,
int firstOctave=SIFT::CommonParams::DEFAULT_FIRST_OCTAVE,
int angleMode=SIFT::CommonParams::FIRST_ANGLE );
threshold:过滤掉较差的特征点的对阈值。threshold越大,返回的特征点越少。
edgeThreshold:过滤掉边缘效应的阈值。edgeThreshold越大,特征点越多
⑤、SURF检测
void surfDetect()
{
vector<KeyPoint> keypoints_1, keypoints_2;
Mat descriptors_1, descriptors_2;
//-- Step 1: Detect the keypoints using SURF Detector
SurfFeatureDetector surf(2500);
surf.detect(image,keypoints_1);
surf.detect(image2,keypoints_2);
//-- Step 2: Calculate descriptors (feature vectors)
SurfDescriptorExtractor extractor;
extractor.compute( image, keypoints_1, descriptors_1 );
extractor.compute( image2, keypoints_2, descriptors_2 );
//-- Step 3: Matching descriptor vectors with a brute force matcher
BruteForceMatcher< L2<float> > matcher;
std::vector< DMatch > matches;
matcher.match( descriptors_1, descriptors_2, matches );
nth_element(matches.begin(),matches.begin()+24,matches.end());
matches.erase(matches.begin()+25,matches.end());
//-- Draw matches
Mat img_matches;
drawMatches( image, keypoints_1, image2, keypoints_2, matches, img_matches,Scalar(255,255,255) );
drawKeypoints(image,keypoints_1,image,Scalar(255,255,255),DrawMatchesFlags::DRAW_RICH_KEYPOINTS);
//-- Show detected matches
imshow("Matches", img_matches );
imshow (winname,image);
}
SurfFeatureDetector
构造函数
SurfFeatureDetector( double hessianThreshold = 400., int octaves = 3,
int octaveLayers = 4 );
hessianThreshold:阈值
octaves:金字塔组数
octaveLayers:金字塔中每组的层数
SurfDescriptorExtractor
功能:来封装的用于计算特征描述子的类,构造SURE描述子提取器
compute
功能:根据检测到的图像(第一种情况)或者图像集合(第二种情况)中的关键点(检测子)计算描述子.
void DescriptorExtractor::compute(const Mat& image, vector<KeyPoint>& keypoints, Mat& descriptors) const
void DescriptorExtractor::compute(const vector<Mat>& images, vector<vector<KeyPoint>>& keypoints, vector<Mat>& descriptors) const
image :输入图像.
images :输入图像集.
keypoints:输入的特征关键点.
descriptors:计算特征描述子
BruteForceMatcher< L2<float> >
功能:暴力搜索特征点匹配. 对于第一集合中的特征描述子, 这个匹配寻找了在第二个集合中最近的特征描述子. 这种特征描述子匹配支持 masking permissible特征描述子集合匹配.
它是一个模板类,<>中的参数表示匹配的方式
DMatch
功能:用于匹配特征关键点的特征描述子的类:查询特征描述子索引, 特征描述子索引, 训练图像索引, 以及不同特征描述子之间的距离.
match
功能:给定查询集合中的每个特征描述子,寻找最佳匹配.
结构:
void DescriptorMatcher::match(const Mat& queryDescriptors, const Mat& trainDescriptors, vector<DMatch>& matches, const Mat& mask=Mat() ) const
void DescriptorMatcher::match(const Mat& queryDescriptors, vector<DMatch>& matches, const vector<Mat>& masks=vector<Mat>() )
queryDescriptors :特征描述子查询集.
trainDescriptors :待训练的特征描述子集.
matches :匹配特征描述子类
mask – 特定的在输入查询和训练特征描述子集之间的可允许掩码匹配,指定哪些可以被匹配
masks – masks集. 每个 masks[i] 特定标记出了在输入查询特征描述子和存储的从第i个图像中提取的特征描述子集
第二个方法的trainDesctiptors由DescriptorMatcher::add给出。
nth_element
功能:nth_element作用为求第n小的元素,并把它放在第n位置上,下标是从0开始计数的,也就是说求第0小的元素就是最小的数。
功能:nth_element作用为求第n小的元素,并把它放在第n位置上,下标是从0开始计数的,也就是说求第0小的元素就是最小的数。
erase
功能:移除参数1和参数2之间的元素,返回下一个元素
drawMatches
功能:给定两幅图像,绘制寻找到的特征关键点及其匹配
结构:
void drawMatches(const Mat& img1, const vector<KeyPoint>& keypoints1, const Mat& img2, const vector<KeyPoint>& keypoints2, const vector<DMatch>& matches1to2, Mat& outImg, const Scalar& matchColor=Scalar::all(-1), const Scalar& singlePointColor=Scalar::all(-1), const vector<char>& matchesMask=vector<char>(), int flags=DrawMatchesFlags::DEFAULT )
img1 :第一张原图片
keypoints1 :第一张得到的关键点
img2 :第二张图片
keypoints2 :第二张得到的关键点
matches :匹配点
outImg :输出图片,它的内容依赖于flags的值
matchColor :匹配线的颜色,如果为-1,则颜色随机分配
singlePointColor :单独点,没有匹配到的点的颜色,如果为-1,则颜色随机分配
matchesMask :掩码,表示哪些匹配值被绘制出来,如果为空,表示所有匹配点都绘制出来
flags :和上面drawkeypoints中的flags一样
3、运行结果
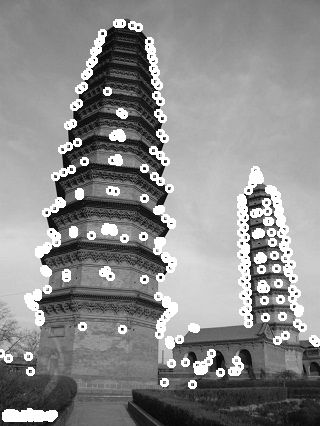

图1、Harris 图2、Shi-Tomasi


图3、FAST 图4、SIFT
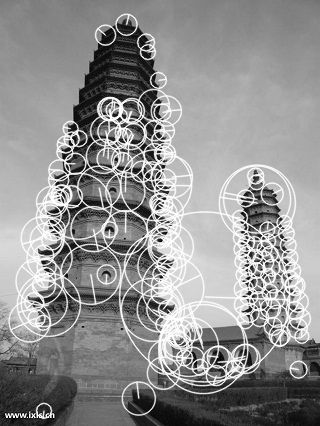
图5、SURF

图6、匹配结果
源代码下载地址:
http://download.csdn.net/detail/chenjiazhou12/7129327