和菜鸟一起学OK6410之ADC模块
今天,完善了公司第二版的红外遥控器,并且在android上跑起来时也比较灵敏了,GPIO模拟的SPI也可以工作了,看了会书,修正了会,回到宿舍也已经9点多了。想想,OK6410上还有个AD模块呢。网上找了找资料,发现还是可以去尝试下可不可以实现的。好吧,花了我快一个小时了,哈哈,终于搞定了。
下面看代码:
#include <linux/module.h>
#include <linux/types.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/mm.h>
#include <linux/sched.h>
#include <linux/init.h>
#include <linux/cdev.h>
#include <asm/io.h>
#include <asm/system.h>
#include <asm/uaccess.h>
#include <linux/device.h> /* device_create()*/
#include <asm/io.h>
#include <asm/irq.h>
#include <asm/uaccess.h>
#include <mach/map.h>
#include <plat/regs-adc.h>
#include <mach/map.h>
static void __iomem *base_addr;
#define __ADCREG(name) (*(volatile unsigned long *)(base_addr + name))
#define ADCCON __ADCREG(S3C_ADCCON) // ADC control
#define ADCDAT0 __ADCREG(S3C_ADCDAT0) // ADC conversion data 0
#define ADC_START (1 << 0)
#define ADC_SIZE 0x1000
#define ADC_MAJOR 240
static int adc_major = ADC_MAJOR;
struct adc_dev {
struct cdev cdev;
unsigned char mem[ADC_SIZE];
};
struct adc_dev *adc_devp;
static int adc_init(void)
{
unsigned int preScaler = 0XFF;
ADCCON = (1<<14) | (preScaler<<6) | (0<<3) | (0<<2);
ADCCON |= ADC_START;
return 0;
}
static int adc_open(struct inode *inode, struct file *filp)
{
printk("$$$$$%s$$$$$\n", __func__);
adc_init();
return 0;
}
static int adc_release(struct inode *inode, struct file *filp)
{
printk("$$$$$$%s$$$$$\n", __func__);
return 0;
}
static ssize_t adc_read(struct file *filp, char __user *buf, size_t size,
loff_t *ppos)
{
unsigned int count = size;
int ret = 0;
printk("$$$$$%s$$$$$\n", __func__);
ADCCON |= ADC_START;
while(ADCCON & 0x01);//check if Enable_start is low
while(!(ADCCON &0x8000));
ret = ADCDAT0 & 0x3ff;
count = copy_to_user(buf,(char *)&ret,sizeof(ret));
return sizeof(ret);
}
static const struct file_operations adc_fops = {
.owner = THIS_MODULE,
.read = adc_read,
.open = adc_open,
.release = adc_release,
};
static void adc_setup_cdev(struct adc_dev *dev, int index)
{
int err, devno = MKDEV(adc_major, index);
cdev_init(&dev->cdev, &adc_fops);
dev->cdev.owner = THIS_MODULE;
err = cdev_add(&dev->cdev, devno, 1);
if (err)
printk(KERN_NOTICE "Error %d adding LED%d", err, index);
}
struct class *myclass;
int adc_dev_init(void)
{
int result;
printk("$$$$$$%s$$$$$$\n", __func__);
dev_t devno = MKDEV(adc_major, 0);
if (adc_major)
result = register_chrdev_region(devno, 1, "adc");
else {
result = alloc_chrdev_region(&devno, 0, 1, "adc");
adc_major = MAJOR(devno);
}
if (result < 0)
return result;
adc_devp = kmalloc(sizeof(struct adc_dev), GFP_KERNEL);
if (!adc_devp) {
result = - ENOMEM;
goto fail_malloc;
}
memset(adc_devp, 0, sizeof(struct adc_dev));
adc_setup_cdev(adc_devp, 0);
myclass = class_create(THIS_MODULE,"test_char");
device_create(myclass, NULL, MKDEV(adc_major,0), NULL, "adc");
base_addr = ioremap(0x7E00B000,0X20);
if(base_addr == NULL)
{
printk("failed to remap\n");
return -ENOMEM;
}
return 0;
fail_malloc:
unregister_chrdev_region(devno, 1);
return result;
}
void adc_dev_exit(void)
{
cdev_del(&adc_devp->cdev);
kfree(adc_devp);
unregister_chrdev_region(MKDEV(adc_major, 0), 1);
class_destroy(myclass);
device_destroy(myclass,MKDEV(adc_major,0));
iounmap(base_addr);
}
MODULE_AUTHOR("Barry Song <[email protected]>");
MODULE_LICENSE("Dual BSD/GPL");
module_param(adc_major, int, S_IRUGO);
module_init(adc_dev_init);
module_exit(adc_dev_exit);
代码不是本人写的,参考的,然后稍微去掉不必要的,加了些测试打印,用以消化。
看上面的代码,主要用到的就是那两个寄存器了。
先看下AD模块的原理图和管脚吧
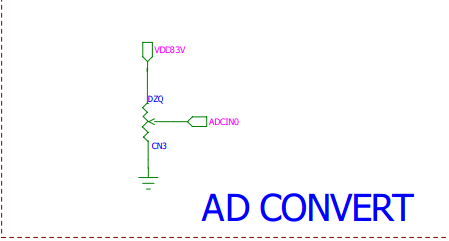
其管脚是

再来看看这两个寄存器吧
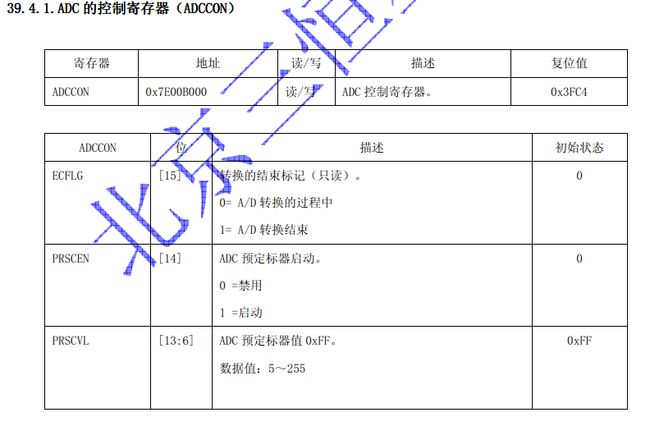
ADCCON = (1<<14) | (preScaler<<6) | (0<<3) | (0<<2);
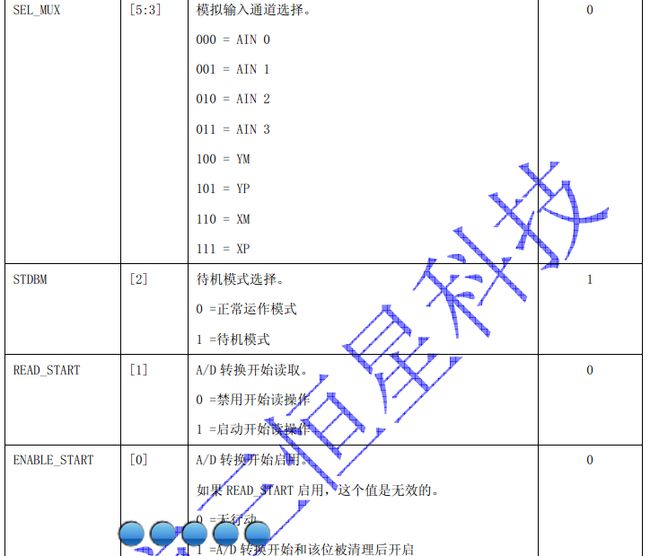
这里的1<<14就是启动AD转换。preScaler<<6就是ADC预定标器值0xff了,0<<3就表示adc通道0,就是这个AD模块了。然后 0 << 2就是正常运作模式了。
好了分析完控制寄存器那么就是数据寄存器了。
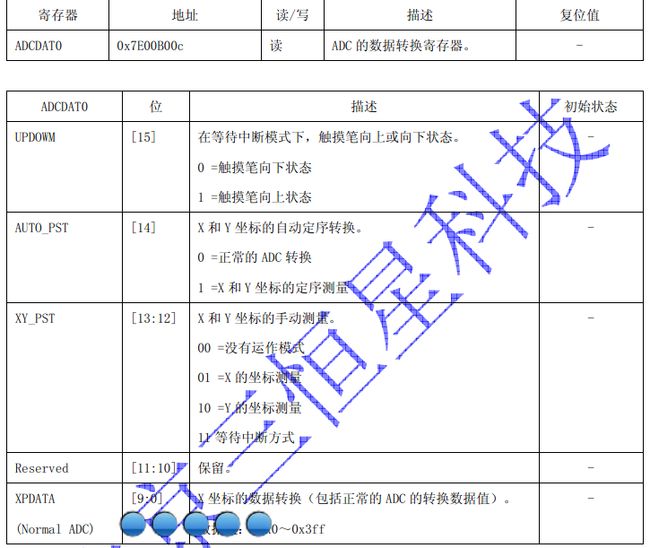
while(ADCCON & 0x01);//check if Enable_start is low while(!(ADCCON &0x8000)); ret = ADCDAT0 & 0x3ff;
while(ADCCON & 0x01);判断是否AD转换好了。while(!(ADCCON &0x8000));判断AD转换是否结束。 ret = ADCDAT0 & 0x3ff;,正常的ADC转换后的值。
就这样,搞定了,很简单?还行吧,差不多吧,只能说。
接着就是makefile了:
obj-m :=adc.o
然后建个makemod,代码如下
make -C /home/eastmoon/work/linux2.6.28/ M=`pwd` modules
然后只要source makemod就可以编译成buzzer.ko了
OK,驱动就这么着了,然后就是应用程序了
#include <stdio.h>
#include <fcntl.h>
#include <unistd.h>
#define DEVICE "/dev/myadc"
int main()
{
int fp,adc_data,i;
int ret;
fp = open(DEVICE, O_RDWR);
if(fp < 0)
{
printf("open failed!\n");
return -1;
}
while(1)
{
ret = read(fp,&adc_data,sizeof(adc_data));
if(ret<0)
{
printf("read ADC failed!\n");
return -1;
}
else
{
printf("Read ADC value is: %d\n",adc_data);
}
sleep(1);
}
close(fp);
return 0;
}
接着makefile:
CC = /usr/local/arm/4.2.2-eabi/usr/bin/arm-linux-gcc
adcapp:adcapp.o
$(CC) -o adcapp adcapp.o
adcapp.o:adcapp.c
$(CC) -c adcapp.c
clean :
rm adcapp.o
终于搞定,于是便是到板子上去调试了。把adc.ko和adcapp拷贝到SD卡上,然后再拷贝到板子上。开始测试:

Init进去了,没提示错误,表示一切OK。
接着mknod设备文件

好了,设备节点OK,接着就是测试程序了。
一开始电位器的位置是这样的,然后旋转电位器
再旋转范围大点的:
最后结束:
OK,测试都通过了,明天就是周五了,又是周末了,天气是越来越热了,继续努力。发现自己的知识体系还远远不够,和同事相比还是有很大的差别啊。加油,come on。。。。