图的算法
1.最短主树
P算法:顺序取端,边取最小

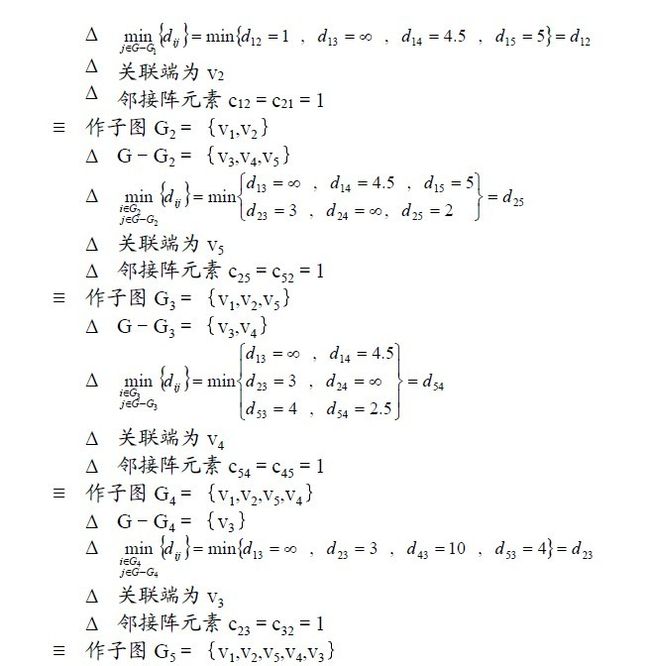
图中端间最短路径计算
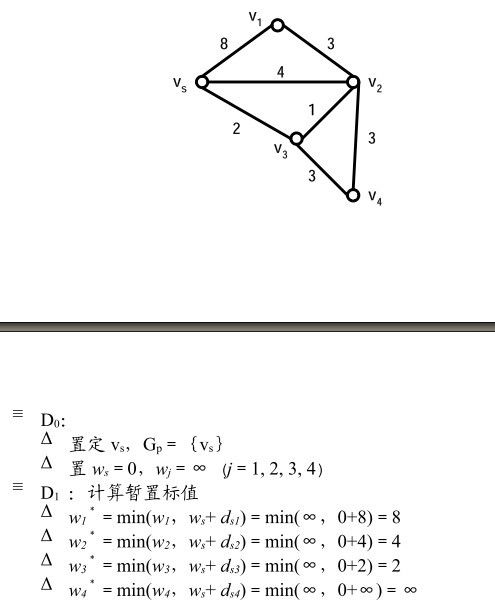
Dijkstra算法(当路径权值均为正数时应用)
1 最短路径算法
在日常生活中,我们如果需要常常往返A地区和B地区之间,我们最希望知道的可能是从A地区到B地区间的众多路径中,那一条路径的路途最短。最短路径问题是图论研究中的一个经典算法问题, 旨在寻找图(由结点和路径组成的)中两结点之间的最短路径。 算法具体的形式包括:
(1)确定起点的最短路径问题:即已知起始结点,求最短路径的问题。
(2)确定终点的最短路径问题:与确定起点的问题相反,该问题是已知终结结点,求最短路径的问题。在无向图中该问题与确定起点的问题完全等同,在有向图中该问题等同于把所有路径方向反转的确定起点的问题。
(3)确定起点终点的最短路径问题:即已知起点和终点,求两结点之间的最短路径。
(4)全局最短路径问题:求图中所有的最短路径。
用于解决最短路径问题的算法被称做“最短路径算法”, 有时被简称作“路径算法”。 最常用的路径算法有:Dijkstra算法、A*算法、Bellman-Ford算法、Floyd-Warshall算法、Johnson算法。
本文主要研究Dijkstra算法的单源算法。
2 Dijkstra算法
2.1 Dijkstra算法
Dijkstra算法是典型最短路算法,用于计算一个节点到其他所有节点的最短路径。主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止。Dijkstra算法能得出最短路径的最优解,但由于它遍历计算的节点很多,所以效率低。
Dijkstra算法是很有代表性的最短路算法,在很多专业课程中都作为基本内容有详细的介绍,如数据结构,图论,运筹学等等。
2.2 Dijkstra算法思想
Dijkstra算法思想为:设G=(V,E)是一个带权有向图,把图中顶点集合V分成两组,第一组为已求出最短路径的顶点集合(用S表示,初始时S中只有一个源点,以后每求得一条最短路径 , 就将 加入到集合S中,直到全部顶点都加入到S中,算法就结束了),第二组为其余未确定最短路径的顶点集合(用U表示),按最短路径长度的递增次序依次把第二组的顶点加入S中。在加入的过程中,总保持从源点v到S中各顶点的最短路径长度不大于从源点v到U中任何顶点的最短路径长度。此外,每个顶点对应一个距离,S中的顶点的距离就是从v到此顶点的最短路径长度,U中的顶点的距离,是从v到此顶点只包括S中的顶点为中间顶点的当前最短路径长度。
2.3 Dijkstra算法具体步骤
(1)初始时,S只包含源点,即S= ,v的距离为0。U包含除v外的其他顶点,U中顶点u距离为边上的权(若v与u有边 )或 )(若u不是v的出边邻接点)。
(2)从U中选取一个距离v最小的顶点k,把k,加入S中(该选定的距离就是v到k的最短路径长度)。
(3)以k为新考虑的中间点,修改U中各顶点的距离;若从源点v到顶点u(u U)的距离(经过顶点k)比原来距离(不经过顶点k)短,则修改顶点u的距离值,修改后的距离值的顶点k的距离加上边 上的权。
(4)重复步骤(2)和(3)直到所有顶点都包含在S中。
此方法用到了,某两点之间的最短路径,上的子路径肯定也是最短的,:每次更新都是得到 通过当前已知最短路径可达那些未知最短路径点的最短路径值。
Bellman-Ford算法与另一个非常著名的Dijkstra算法一样,用于求解单源点最短路径问题。Bellman-ford算法除了可求解边权均非负的问题外,还可以解决存在负权边的问题(意义是什么,好好思考),而Dijkstra算法只能处理边权非负的问题,因此 Bellman-Ford算法的适用面要广泛一些。但是,原始的Bellman-Ford算法时间复杂度为(VE),比Dijkstra算法的时间复杂度高。
Bellman-Ford算法思想
Bellman-Ford算法能在更普遍的情况下(存在负权边)解决单源点最短路径问题。对于给定的带权(有向或无向)图 G=(V,E),其源点为s,加权函数 w是 边集 E 的映射。对图G运行Bellman-Ford算法的结果是一个布尔值,表明图中是否存在着一个从源点s可达的负权回路。若不存在这样的回路,算法将给出从源点s到 图G的任意顶点v的最短路径d[v]。
Bellman-Ford(G,w,s) :boolean //图G ,边集 函数 w ,s为源点
1 for each vertex v ∈ V(G) do //初始化 1阶段
2 d[v] ←+∞
3 d[s] ←0; //1阶段结束
4 for i=1 to |v|-1 do //2阶段开始,双重循环。
5 for each edge(u,v) ∈E(G) do //边集数组要用到,穷举每条边。
6 If d[v]> d[u]+ w(u,v) then //松弛判断
7 d[v]=d[u]+w(u,v) //松弛操作 2阶段结束
8 for each edge(u,v) ∈E(G) do
9 If d[v]> d[u]+ w(u,v) then
10 Exit false
11 Exit true
下面给出描述性证明:
首先指出,图的任意一条最短路径既不能包含负权回路,也不会包含正权回路,因此它最多包含|v|-1条边。
其次,从源点s可达的所有顶点如果 存在最短路径,则这些最短路径构成一个以s为根的最短路径树。Bellman-Ford算法的迭代松弛操作,实际上就是按顶点距离s的层次,逐层生成这棵最短路径树的过程。
在对每条边进行1遍松弛的时候,生成了从s出发,层次至多为1的那些树枝。也就是说,找到了与s至多有1条边相联的那些顶点的最短路径;对每条边进行第2遍松弛的时候,生成了第2层次的树枝,就是说找到了经过2条边相连的那些顶点的最短路径……。因为最短路径最多只包含|v|-1 条边,所以,只需要循环|v|-1 次。
每实施一次松弛操作,最短路径树上就会有一层顶点达到其最短距离,此后这层顶点的最短距离值就会一直保持不变,不再受后续松弛操作的影响。(但是,每次还要判断松弛,这里浪费了大量的时间,怎么优化?单纯的优化是否可行?)
如果没有负权回路,由于最短路径树的高度最多只能是|v|-1,所以最多经过|v|-1遍松弛操作后,所有从s可达的顶点必将求出最短距离。如果 d[v]仍保持 +∞,则表明从s到v不可达。
如果有负权回路,那么第 |v|-1 遍松弛操作仍然会成功,这时,负权回路上的顶点不会收敛。
Floyd-Warshall算法(弗洛伊德算法)
写起来最简单的算法:3个for循环,需要邻接矩阵表示
Floyd-Warshall算法(Floyd-Warshall algorithm)是解决任意两点间的最短路径的一种算法,可以正确处理有向图或负权的最短路径问题,同时也被用于计算有向图的传递闭包。Floyd-Warshall算法的时间复杂度为O(N3),空间复杂度为O(N2)。
Floyd-Warshall算法的原理是动态规划。
设Di,j,k为从i到j的只以(1..k)集合中的节点为中间节点的最短路径的长度。
- 若最短路径经过点k,则Di,j,k = Di,k,k − 1 + Dk,j,k − 1;
- 若最短路径不经过点k,则Di,j,k = Di,j,k − 1。
因此,Di,j,k = min(Di,k,k − 1 + Dk,j,k − 1,Di,j,k − 1)。
n=rows(W)
for k=1 to n//遍历点集
for i=1 to n
for j=1 to n
d(i,j,k)=min(d(i,j,k-1),d(i,k,k-1)+d(k,j,k-1))//需要三维矩阵n^3,第k 行第k列都是不变的
或者d(i,j)=min(d(i,j),d(i,k)+d(k,j)) //只需要二维矩阵即可
return D(n)