Deep Learning 系列(3):CNN(卷积神经网络)
早就想写CNN的博文了,最近刚好有空。总体来说,CNN框架不难理解,关键是里面的实现细节值得思考。初次了解,可以先看看UFLDL教程中的Convolution和Pooling。
这基本上是CNN的核心。
简单理解:Convolution即用一个滑动的小窗口去卷积一个大的图像。
Pooling 即滑动的小窗口各权值为1/m (m 为权值个数)。
另外,在pooling中有sigmoid激活函数,进行非线性化。
zouxy09 对CNN框架有详细描述。
Tornadomeet对重点对C3层与S2层的特征图链接有详细描述。
下图为经典的LeNet5结构图。
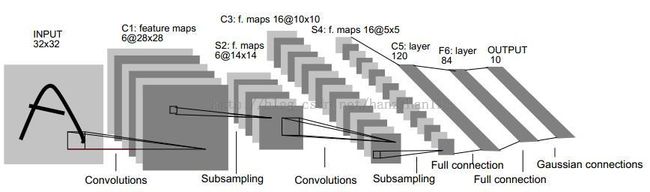
C1层,由6个filter(5*5)卷积Input 32*32得到。6@(32-5+1)*(32-5+1)。参数有6*(5*5+1)=156个。1为偏置bias。
S2层,对C1进行池化和sigm非参数化。6@(28/2)*(28/2)。参数有6*(1+1)=12。两个1分别为权值Ws2和偏置bs2。
C3层,可参考下表:
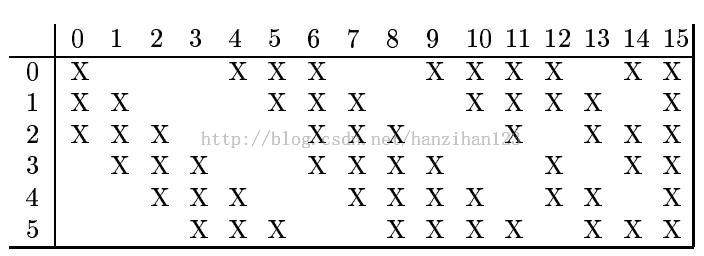
X代表C3层中与S2层有连接的。
Tornadomeet写的有点复杂,我的理解是:C3中有16个filter,用他们分别去卷积S2中与之有连接的特征图。如C3中No.3与S2中No.3/4/5有连接,则用No.3号filter去卷积这三个特征图,然后求和。
S4层同S2。
C5层同C3,但不同的是有120个filter,分别去卷积S4层中全部16个特征图。
F6层与C5是全连接,即分别与C5层中120个特征图相连。采用sigm激活函数。
具体代码,参见DeepLearnToolbox
\tests\test_example_CNN.m
该代码没用到tornadomeet的博文表,而是直接与S2全部6个特征图卷积。
代码详解可参见Dark的CNN博文。
这里只对一些关键处作解释~
// cnntrain.m, 其中code 12-23
for l = 1 : numbatches %批量梯度下降的次数
batch_x = x(:, :, kk((l - 1) * opts.batchsize + 1 : l * opts.batchsize)); % 这里是随机提取样本中的batchsize个样本,作批量梯度下降法
batch_y = y(:, kk((l - 1) * opts.batchsize + 1 : l * opts.batchsize));
net = cnnff(net, batch_x); %前向传导
net = cnnbp(net, batch_y); %后项调参
net = cnnapplygrads(net, opts); %更新权值
if isempty(net.rL)
net.rL(1) = net.L;
end
net.rL(end + 1) = 0.99 * net.rL(end) + 0.01 * net.L;
end// cnnff.m, 全部code吧~(将算法表述的很好,
值得借鉴!)
function net = cnnff(net, x)
n = numel(net.layers);
net.layers{1}.a{1} = x;
inputmaps = 1;
for l = 2 : n % for each layer
if strcmp(net.layers{l}.type, 'c')
% !!below can probably be handled by insane matrix operations
for j = 1 : net.layers{l}.outputmaps % for each output map
% create temp output map
z = zeros(size(net.layers{l - 1}.a{1}) - [net.layers{l}.kernelsize - 1 net.layers{l}.kernelsize - 1 0]);
for i = 1 : inputmaps % for each input map
% 注意将每一个input特征图与K核卷积,求和为output特征图。K核有inputmaps * outputmaps个
z = z + convn(net.layers{l - 1}.a{i}, net.layers{l}.k{i}{j}, 'valid');
end
% 添加bias,用sigm非线性化
net.layers{l}.a{j} = sigm(z + net.layers{l}.b{j});
end
% set number of input maps to this layers number of outputmaps
inputmaps = net.layers{l}.outputmaps;
elseif strcmp(net.layers{l}.type, 's')
% downsample
for j = 1 : inputmaps
% 这里重要,用convn 作pooling,简洁!
z = convn(net.layers{l - 1}.a{j}, ones(net.layers{l}.scale) / (net.layers{l}.scale ^ 2), 'valid'); % !! replace with variable
net.layers{l}.a{j} = z(1 : net.layers{l}.scale : end, 1 : net.layers{l}.scale : end, :);
end
end
end
% concatenate all end layer feature maps into vector
net.fv = [];
for j = 1 : numel(net.layers{n}.a)
sa = size(net.layers{n}.a{j});
% 这里是直接拉伸为向量,每个样本的特征大小为layer{n}层特征图个数* sa(1) * sa(2)
net.fv = [net.fv; reshape(net.layers{n}.a{j}, sa(1) * sa(2), sa(3))];
end
% 前馈给感知机,这里是权值ffw
net.o = sigm(net.ffW * net.fv + repmat(net.ffb, 1, size(net.fv, 2)));
end
//cnnbp.m, 全部code吧~(这里其实就是反向传导算法!)
function net = cnnbp(net, y)
n = numel(net.layers);
% error
net.e = net.o - y;
% loss function
net.L = 1/2* sum(net.e(:) .^ 2) / size(net.e, 2);
%% backprop deltas
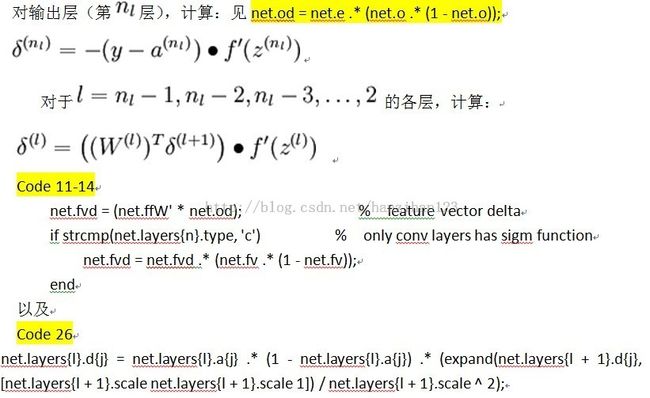
net.od = net.e .* (net.o .* (1 - net.o)); % output delta
net.fvd = (net.ffW' * net.od); % feature vector delta
if strcmp(net.layers{n}.type, 'c') % only conv layers has sigm function
net.fvd = net.fvd .* (net.fv .* (1 - net.fv));
end
% reshape feature vector deltas into output map style
sa = size(net.layers{n}.a{1});
fvnum = sa(1) * sa(2);
for j = 1 : numel(net.layers{n}.a)
net.layers{n}.d{j} = reshape(net.fvd(((j - 1) * fvnum + 1) : j * fvnum, :), sa(1), sa(2), sa(3));
end
for l = (n - 1) : -1 : 1
if strcmp(net.layers{l}.type, 'c')
for j = 1 : numel(net.layers{l}.a)
net.layers{l}.d{j} = net.layers{l}.a{j} .* (1 - net.layers{l}.a{j}) .* (expand(net.layers{l + 1}.d{j}, [net.layers{l + 1}.scale net.layers{l + 1}.scale 1]) / net.layers{l + 1}.scale ^ 2);
end
elseif strcmp(net.layers{l}.type, 's')
for i = 1 : numel(net.layers{l}.a)
z = zeros(size(net.layers{l}.a{1}));
for j = 1 : numel(net.layers{l + 1}.a)
z = z + convn(net.layers{l + 1}.d{j}, rot180(net.layers{l + 1}.k{i}{j}), 'full');
end
net.layers{l}.d{i} = z;
end
end
end
%% calc gradients
for l = 2 : n
if strcmp(net.layers{l}.type, 'c')
for j = 1 : numel(net.layers{l}.a)
for i = 1 : numel(net.layers{l - 1}.a)
net.layers{l}.dk{i}{j} = convn(flipall(net.layers{l - 1}.a{i}), net.layers{l}.d{j}, 'valid') / size(net.layers{l}.d{j}, 3);
end
net.layers{l}.db{j} = sum(net.layers{l}.d{j}(:)) / size(net.layers{l}.d{j}, 3);
end
end
end
net.dffW = net.od * (net.fv)' / size(net.od, 2);
net.dffb = mean(net.od, 2);
function X = rot180(X)
X = flipdim(flipdim(X, 1), 2);
end
end
更详细可参见:refer-2 这篇论文已经UFLDL中的反向传导算法
其本质跟DBN是同样的,需要用BP来进行反向fine。不同的可能是实现细节上,因为有pooling层(无sigm),则code的实现细节有变化。当然这个代码真心写的很好!
参考:
1. Convolutional Neural Networks (LeNet)
2. Notes on Convolutional Neural Networks
3. ImageNet Classification with Deep Convolutional Neural Networks
4. zouxy09 的博文 (对CNN有详细的描述)
5. tornadomeet 的博文 (对S2-C3的组合特征有描述)
6. Dar 的博文 (对DL-tool工具箱的CNN有描述)
未完待续。。。