HashMap和TreeMap区别详解以及底层实现
前言
首先介绍一下什么是Map.在数组中我们是通过数组下标来对其内容索引的,而在Map中我们通过对象来对对象进行索引,用来索引的对象叫做key,其对应的对象叫做value.这就是我们平时说的键值对。
HashMap通过hashcode对其内容进行快速查找,而 TreeMap中所有的元素都保持着某种固定的顺序,如果你需要得到一个有序的结果你就应该使用TreeMap(HashMap中元素的排列顺序是不固定的)。
HashMap 代码分析
HashMap 是基于哈希表的 Map 接口的实现。此实现提供所有可选的映射操作,并允许使用 null 值和 null 键。(除了非同步和允许使用 null 之外,HashMap 类与 Hashtable 大致相同。)此类不保证映射的顺序,特别是它不保证该顺序恒久不变。
官方文档如下:
此实现假定哈希函数将元素适当地分布在各桶之间,可为基本操作(get 和 put)提供稳定的性能。迭代 collection 视图所需的时间与 HashMap 实例的“容量”(桶的数量)及其大小(键-值映射关系数)成比例。所以,如果迭代性能很重要,则不要将初始容量设置得太高(或将加载因子设置得太低)。
HashMap 的实例有两个参数影响其性能:初始容量 和加载因子。容量 是哈希表中桶的数量,初始容量只是哈希表在创建时的容量。加载因子 是哈希表在其容量自动增加之前可以达到多满的一种尺度。当哈希表中的条目数超出了加载因子与当前容量的乘积时,则要对该哈希表进行 rehash 操作(即重建内部数据结构),从而哈希表将具有大约两倍的桶数。
通常,默认加载因子 (.75) 在时间和空间成本上寻求一种折衷。加载因子过高虽然减少了空间开销,但同时也增加了查询成本(在大多数 HashMap 类的操作中,包括 get 和 put 操作,都反映了这一点)。在设置初始容量时应该考虑到映射中所需的条目数及其加载因子,以便最大限度地减少 rehash 操作次数。如果初始容量大于最大条目数除以加载因子,则不会发生 rehash 操作。
如果很多映射关系要存储在 HashMap 实例中,则相对于按需执行自动的 rehash 操作以增大表的容量来说,使用足够大的初始容量创建它将使得映射关系能更有效地存储。
注意,此实现不是同步的。如果多个线程同时访问一个哈希映射,而其中至少一个线程从结构上修改了该映射,则它必须 保持外部同步。(结构上的修改是指添加或删除一个或多个映射关系的任何操作;仅改变与实例已经包含的键关联的值不是结构上的修改。)这一般通过对自然封装该映射的对象进行同步操作来完成。如果不存在这样的对象,则应该使用 Collections.synchronizedMap 方法来“包装”该映射。最好在创建时完成这一操作,以防止对映射进行意外的非同步访问,如下所示:
Map m = Collections.synchronizedMap(new HashMap(…));
由所有此类的“collection 视图方法”所返回的迭代器都是快速失败 的:在迭代器创建之后,如果从结构上对映射进行修改,除非通过迭代器本身的 remove 方法,其他任何时间任何方式的修改,迭代器都将抛出 ConcurrentModificationException。因此,面对并发的修改,迭代器很快就会完全失败,而不冒在将来不确定的时间发生任意不确定行为的风险。
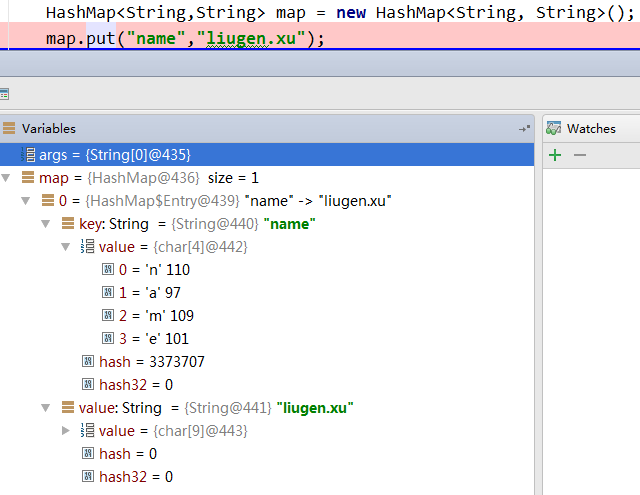
Map.put()的时候,需要将key值映射为相应的hash值,key的值是以char数组的形式存放的,value对应的值也是有char数组存放的
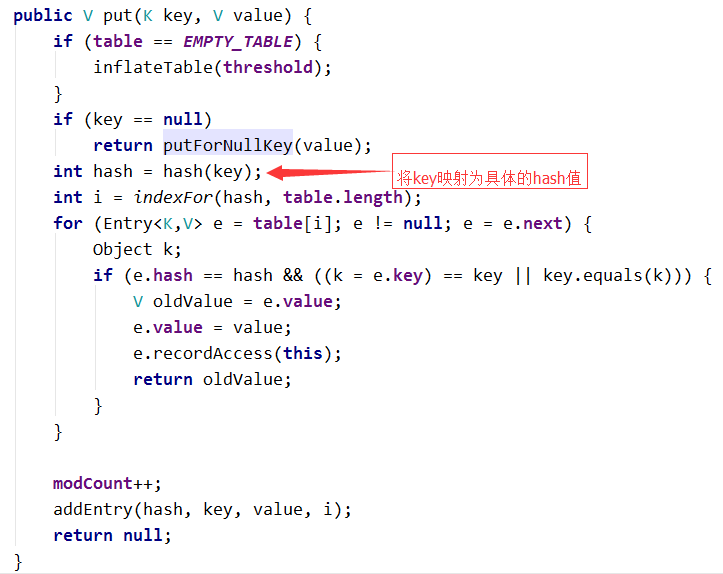
在进行存放的时候,首先检查table是否为空,如果为空使用inflateTable方法进行初始化操作。
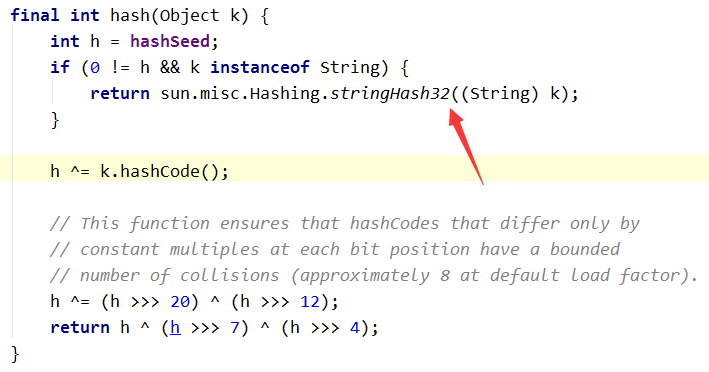
这里用到的hash方法如下:
Map.get()的时候,是根据hash值进行查找的:
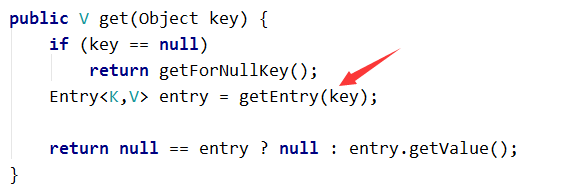
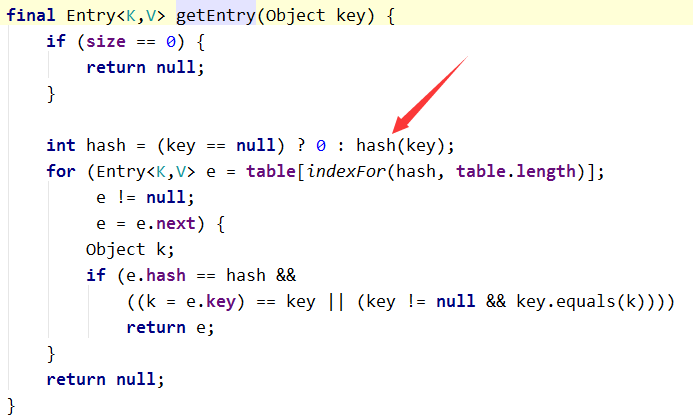
然后就是调用hash方法,找到具体的key所对应的hash,然后再到entry中去找value
TreeMap代码分析

看到上边,可知TreeMap并不是基于hash实现的,据说是红黑树,红黑树这块几乎空白,不敢多说:
TreeMap:基于红黑树实现。TreeMap没有调优选项,因为该树总处于平衡状态。
(1)TreeMap():构建一个空的映像树
(2)TreeMap(Map m): 构建一个映像树,并且添加映像m中所有元素
(3)TreeMap(Comparator c): 构建一个映像树,并且使用特定的比较器对关键字进行排序
(4)TreeMap(SortedMap s): 构建一个映像树,添加映像树s中所有映射,并且使用与有序映像s相同的比较器排序。
官方文档:
基于红黑树(Red-Black tree)的 NavigableMap 实现。该映射根据其键的自然顺序进行排序,或者根据创建映射时提供的 Comparator 进行排序,具体取决于使用的构造方法。
此实现为 containsKey、get、put 和 remove 操作提供受保证的 log(n) 时间开销。这些算法是 Cormen、Leiserson 和 Rivest 的 Introduction to Algorithms 中的算法的改编。
注意,如果要正确实现 Map 接口,则有序映射所保持的顺序(无论是否明确提供了比较器)都必须与 equals 一致。(关于与 equals 一致 的精确定义,请参阅 Comparable 或 Comparator)。这是因为 Map 接口是按照 equals 操作定义的,但有序映射使用它的 compareTo(或 compare)方法对所有键进行比较,因此从有序映射的观点来看,此方法认为相等的两个键就是相等的。即使排序与 equals 不一致,有序映射的行为仍然是 定义良好的,只不过没有遵守 Map 接口的常规协定。
注意,此实现不是同步的。如果多个线程同时访问一个映射,并且其中至少一个线程从结构上修改了该映射,则其必须 外部同步。(结构上的修改是指添加或删除一个或多个映射关系的操作;仅改变与现有键关联的值不是结构上的修改。)这一般是通过对自然封装该映射的对象执行同步操作来完成的。如果不存在这样的对象,则应该使用 Collections.synchronizedSortedMap 方法来“包装”该映射。最好在创建时完成这一操作,以防止对映射进行意外的不同步访问,如下所示:
SortedMap m = Collections.synchronizedSortedMap(new TreeMap(…));
collection(由此类所有的“collection 视图方法”返回)的 iterator 方法返回的迭代器都是快速失败 的:在迭代器创建之后,如果从结构上对映射进行修改,除非通过迭代器自身的 remove 方法,否则在其他任何时间以任何方式进行修改都将导致迭代器抛出 ConcurrentModificationException。因此,对于并发的修改,迭代器很快就完全失败,而不会冒着在将来不确定的时间发生不确定行为的风险。
HashMap和TreeMap比较
(1)HashMap:适用于在Map中插入、删除和定位元素。
(2)Treemap:适用于按自然顺序或自定义顺序遍历键(key)。
(3)HashMap通常比TreeMap快一点(树和哈希表的数据结构使然),建议多使用HashMap,在需要排序的Map时候才用TreeMap.
(4)HashMap 非线程安全 TreeMap 非线程安全
(5)HashMap的结果是没有排序的,而TreeMap输出的结果是排好序的。
在HashMap中通过get()来获取value,通过put()来插入value,ContainsKey()则用来检验对象是否已经存在。可以看出,和ArrayList的操作相比,HashMap除了通过key索引其内容之外,别的方面差异并不大。