H.264码率控制算法研究及JM相应代码分析(二)
在前一篇文章的基础上,现在先看一下MPEG4 编码标准中应用的码率控制算法,总结起来,各大算法都是在解决两个问题:RD 率失真的优化以及避免缓冲区的上溢下溢。
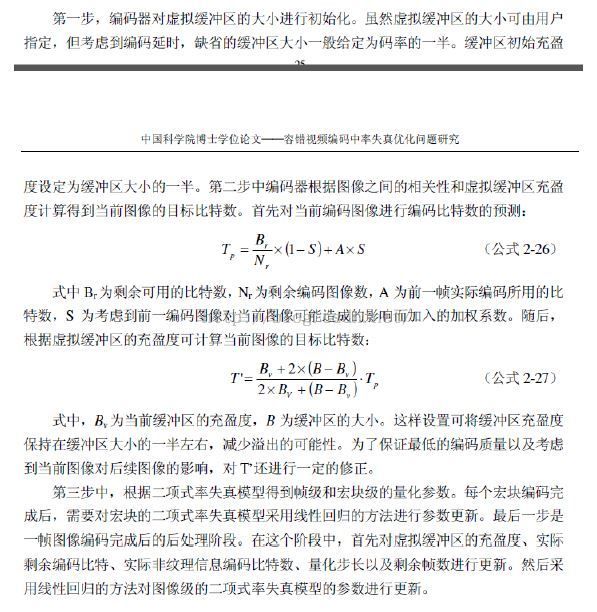
MPEG-4 VM8 码率控制算法
在这里要先介绍一个非常著名的二项式率失真模型,其实说来也简单,在前面我们提到拉普拉斯分布信源的概率密度函数为:



代码分析
下面结合JM代码来看一下H.264的码率控制算法。
首先需要知道的是,在JM中默认使用的是基于JVT-G012r1的码率控制方法。
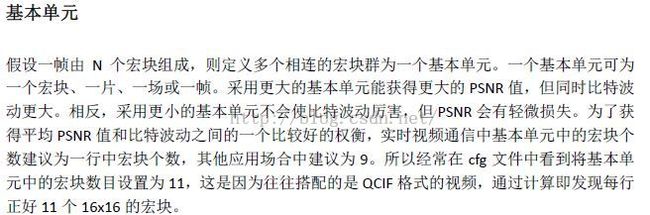
该提案中提出了自适应基本单元层码率控制方案,提出基本单元和线性模型的概念。其中,基本单元可为一帧、一片或一个宏块。而线性模型是用前一帧相同位置处的基本单元的MAD值来预测当前帧当前基本单元的MAD值,这样求MAD值就可以解决蛋鸡悖论。
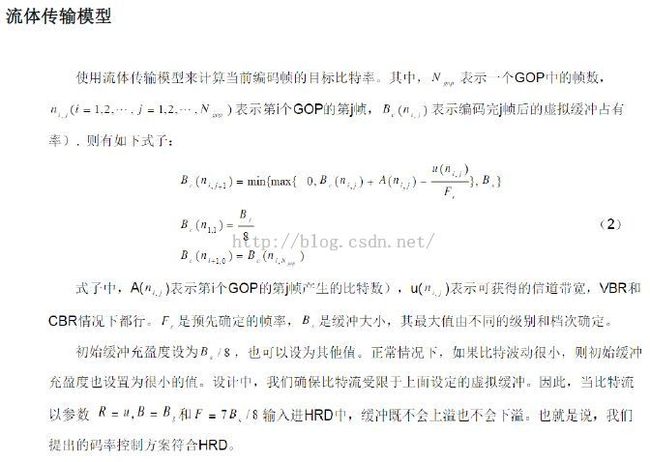
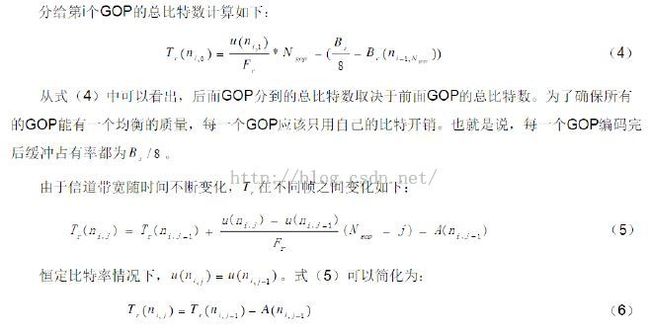
解决过程如下:采用漏桶模型和线性跟踪理论,根据已经确定的帧率、当前的缓冲占有率、目标缓冲级别和可获取的信道带宽来算出当前帧的目标码率。剩余比特数则平均分配给当前帧中没有编码的基本单元,因为这些基本单元的MAD值还不知道。通过线性模型,可用前一帧相同位置处的基本单元的实际MAD值来预测出当前基本单元的MAD值。之后,用二次率失真模型来计算相应的QP值,从而用来对当前基本单元的每一宏块进行率失真优化。
这里首先设计到三个新的概念,基本单元、MAD线性预测模型以及用于计算缓冲区充盈度的流体传输模型。
Main-init_encoder-init_global_buffers-rc_allocate_memory (rc_quadratic.c)-rc_alloc_generic(ratectl.c)-rc_alloc_quadratic (rc_quadratic.c) 在初始化过程的代码中同时完成了基本单元数目的计算 int rcBufSize = p_Vid->FrameSizeInMbs / p_Inp->basicunit; 此外 Main-init_encoder-rc_init_sequence-rc_init_seq 其中同样包含有计算基本单元总数的代码 p_quad->TotalNumberofBasicUnit = p_Vid->FrameSizeInMbs/p_Inp->basicunit;

Main-init_encoder-rc_init_sequence-rc_init_seq
在该函数的代码中即可看到MAD预测模型参数的初始化
/* linear prediction model for P picture*/
p_quad->PMADPictureC1 = 1.0;
p_quad->PMADPictureC2 = 0.0;
main-encode_sequence-encode_one_frame-perform_encode_frame-rc_init_frame-updateQPRC0-predictCurrPicMAD-update current picture MAD
p_quad->CurrentFrameMAD=p_quad->MADPictureC1*p_quad->BUPFMAD[p_quad->TotalNumberofBasicUnit-p_quad->NumberofBasicUnit]+p_quad->MADPictureC2;
p_quad->TotalBUMAD=0;
for(i=p_quad->TotalNumberofBasicUnit-1; i>=(p_quad->TotalNumberofBasicUnit-p_quad->NumberofBasicUnit);i--)
{
p_quad->CurrentBUMAD=p_quad->MADPictureC1*p_quad->BUPFMAD[i]+p_quad->MADPictureC2;
p_quad->TotalBUMAD +=p_quad->CurrentBUMAD*p_quad->CurrentBUMAD;
}
由此,该方案按如下步骤进行:
- 用流体传输模型和线性跟踪理论来计算当前帧的目标比特数。
- 平均分配剩余的比特数给当前帧中其他没有编码的基本单元。
- 通过MAD线性预测模型用前一帧相同位置处的基本单元的实际MAD值来预测当前帧的当前基本单元的MAD值。
- 用二次R-D模型计算相应的QP值。
- 用从步骤4得来的QP值来对当前基本单元中的每一个宏块进行RDO。
该算法包括三个层面的码率控制,对不同的层面我们有不同的关注点。
首先是GOP层面,这里我们要关注缓冲区的更新过程。
然后是帧层面,这里我们要关注图像复杂度的计算过程。
最后是基本单元层面,这里我们要关注率失真模型的系数更新过程。
GOP层的码率控制
首先
main-encode_sequence-prepare_frame_params-rc_init_gop_params-rc_init_GOP
/*compute the total number of bits for the current GOP*/
AllocatedBits = (int64) floor((1 + np + nb) * p_quad->bit_rate / p_quad->frame_rate + 0.5);
p_gen->RemainingBits += AllocatedBits;
p_quad->Np = np;
p_quad->Nb = nb;
main-encode_sequence-encode_one_frame-perform_encode_frame-rc_init_frame-rc_init_pict
/* Since the available bandwidth may vary at any time, the total number of
bits is updated picture by picture*/
if(prc->PrevBitRate!=prc->bit_rate)
generic_RC->RemainingBits +=(int) floor((prc->bit_rate-prc->PrevBitRate)*(prc->Np + prc->Nb)/prc->frame_rate+0.5);
其次,第一个GOP的初始QP为一个预先确定的值QP0。此时,这个GOP的I帧和第一个P帧以QP0编码。QP0是基于可获得的信道带宽和GOP长度而预先确定的。一般情况下,信道带宽高,选小QP0;信道带宽低,选大QP0。带宽一定时,GOP长度增加15,QP0减小1。
Main-init_encoder-rc_init_sequence-rc_init_seq
实际代码中对第一个GOP的初始QP计算如下
if (p_Inp->SeinitialQP==0)
{
/*compute the initial QP*/
//bpp即每像素比特数
bpp = 1.0*p_quad->bit_rate /(p_quad->frame_rate*p_Vid->size);
if (p_Vid->width == 176)
{
L1 = 0.1;
L2 = 0.3;
L3 = 0.6;
}
else if (p_Vid->width == 352)
{
L1 = 0.2;
L2 = 0.6;
L3 = 1.2;
}
else
{
L1 = 0.6;
L2 = 1.4;
L3 = 2.4;
}
if (bpp<= L1)
qp = 35;
else if(bpp<=L2)
qp = 25;
else if(bpp<=L3)
qp = 20;
else
qp = 10;
p_Inp->SeinitialQP = qp;
}
最后,

main-encode_sequence-prepare_frame_params-rc_init_gop_params-rc_init_GOP
/*compute the average QP of P frames in the previous GOP*/
p_quad->PAverageQp=(int)(1.0 * p_quad->TotalQpforPPicture / p_quad->NumberofPPicture+0.5);
GOPDquant=(int)((1.0*(np+nb+1)/15.0) + 0.5);
if(GOPDquant>2)
GOPDquant=2;
p_quad->PAverageQp -= GOPDquant;
if (p_quad->PAverageQp > (p_quad->QPLastPFrame - 2))
p_quad->PAverageQp--;
// QP is constrained by QP of previous GOP
p_quad->PAverageQp = iClip3(p_quad->QPLastGOP - 2, p_quad->QPLastGOP + 2, p_quad->PAverageQp);
// Also clipped within range.
p_quad->PAverageQp = iClip3(p_Vid->RCMinQP + p_quad->bitdepth_qp_scale, p_Vid->RCMaxQP + p_quad->bitdepth_qp_scale, p_quad->PAverageQp);
p_quad->MyInitialQp = p_quad->PAverageQp;
p_quad->Pm_Qp = p_quad->PAverageQp;
p_quad->PAveFrameQP = p_quad->PAverageQp;
p_quad->QPLastGOP = p_quad->MyInitialQp;
p_quad->PrevLastQP = p_quad->CurrLastQP;
p_quad->CurrLastQP = p_quad->MyInitialQp - 1;
帧层码率控制
帧层码率控制包括两个阶段:编码前和编码后。
编码前阶段的目的是计算所有帧的QP值。
首先来看看如何计算B帧的QP值。
由于B帧不能预测其他任意帧,所以B帧的QP值会比它邻近的P帧或I帧的QP值大,这样I帧和P帧能节省一部分比特开销。另一方面,为了保持视频质量的连贯性,两个相邻帧的QP值之差不能大于2。基于观察,通过如下的线性插值方法,可以获得B帧的QP值: 假设L为两个P帧之间连续B帧的个数,且这两个P帧的QP值分别为QP1和QP2,则第i个B帧的QP值可以根据如下两种情况算出:

if(p_Inp->NumberBFrames==1)
{
p_quad->m_Qc = imin(p_quad->PrevLastQP, p_quad->CurrLastQP) + 2;
p_quad->m_Qc = imax(p_quad->m_Qc, imax(p_quad->PrevLastQP, p_quad->CurrLastQP));
p_quad->m_Qc = imax(p_quad->m_Qc, p_quad->CurrLastQP + 1);
p_quad->m_Qc = iClip3(p_Vid->RCMinQP + p_quad->bitdepth_qp_scale, p_Vid->RCMaxQP + p_quad->bitdepth_qp_scale, p_quad->m_Qc); // Clipping
}
else
{
BFrameNumber = (p_quad->NumberofBFrames + 1) % p_Inp->NumberBFrames;
if(BFrameNumber==0)
BFrameNumber = p_Inp->NumberBFrames;
if((p_quad->CurrLastQP-p_quad->PrevLastQP)<=(-2*p_Inp->NumberBFrames-3))
StepSize=-3;
else if((p_quad->CurrLastQP-p_quad->PrevLastQP)==(-2*p_Inp->NumberBFrames-2))
StepSize=-2;
else if((p_quad->CurrLastQP-p_quad->PrevLastQP)==(-2*p_Inp->NumberBFrames-1))
StepSize=-1;
else if((p_quad->CurrLastQP-p_quad->PrevLastQP)==(-2*p_Inp->NumberBFrames))
StepSize=0;
else if((p_quad->CurrLastQP-p_quad->PrevLastQP)==(-2*p_Inp->NumberBFrames+1))
StepSize=1;
else
StepSize=2;
p_quad->m_Qc = p_quad->PrevLastQP + StepSize;
p_quad->m_Qc += iClip3( -2 * (BFrameNumber - 1), 2*(BFrameNumber-1),
(BFrameNumber-1)*(p_quad->CurrLastQP-p_quad->PrevLastQP)/(p_Inp->NumberBFrames-1));
p_quad->m_Qc = iClip3(p_Vid->RCMinQP + p_quad->bitdepth_qp_scale, p_Vid->RCMaxQP + p_quad->bitdepth_qp_scale, p_quad->m_Qc); // Clipping
}
return p_quad->m_Qc;
然后再看一下P帧的QP值的计算
P帧的QP值通过下面两步求出:

main-encode_sequence-encode_one_frame-perform_encode_frame-rc_init_frame-rc_init_pict
/* predefine the target buffer level for each picture.
basic unit layer rate control */
if(p_gen->NumberofGOP==1)
{
if(p_quad->NumberofPPicture==1)
{
p_quad->TargetBufferLevel = (double) p_gen->CurrentBufferFullness;
p_quad->DeltaP = (p_gen->CurrentBufferFullness - p_quad->GOPTargetBufferLevel)/(p_quad->TotalPFrame - 1);
p_quad->TargetBufferLevel -= p_quad->DeltaP;
}
else if(p_quad->NumberofPPicture>1)
p_quad->TargetBufferLevel -= p_quad->DeltaP;
}
else if(p_gen->NumberofGOP>1)
{
if(p_quad->NumberofPPicture==0)
{
p_quad->TargetBufferLevel = (double) p_gen->CurrentBufferFullness;
p_quad->DeltaP = (p_gen->CurrentBufferFullness - p_quad->GOPTargetBufferLevel) / p_quad->TotalPFrame;
p_quad->TargetBufferLevel -= p_quad->DeltaP;
}
else if(p_quad->NumberofPPicture>0)
p_quad->TargetBufferLevel -= p_quad->DeltaP;
}
……
if(p_quad->NumberofCodedPFrame==1)
p_quad->AveWp = p_quad->Wp;
if((p_quad->NumberofCodedPFrame<8)&&(p_quad->NumberofCodedPFrame>1))
p_quad->AveWp = (p_quad->AveWp + p_quad->Wp * (p_quad->NumberofCodedPFrame-1))/p_quad->NumberofCodedPFrame;
else if(p_quad->NumberofCodedPFrame>1)
p_quad->AveWp = (p_quad->Wp + 7 * p_quad->AveWp) / 8;
……
// compute the average complexity of B frames
if(p_Inp->NumberBFrames>0)
{
// compute the target buffer level
p_quad->TargetBufferLevel += (p_quad->AveWp * (p_Inp->NumberBFrames + 1)*p_quad->bit_rate\
/(p_quad->frame_rate*(p_quad->AveWp+p_quad->AveWb*p_Inp->NumberBFrames))-p_quad->bit_rate/p_quad->frame_rate);
}
……
//compute the average weight
if(p_gen->NumberofCodedBFrame<8)
p_quad->AveWb = (p_quad->AveWb + p_quad->Wb*(p_gen->NumberofCodedBFrame-1)) / p_gen->NumberofCodedBFrame;
else
p_quad->AveWb = (p_quad->Wb + 7 * p_quad->AveWb) / 8;

Main-init_encoder-rc_init_sequence-rc_init_seq
实际代码中对γ和β的设置如下
/*control parameter*/
if(p_Inp->NumberBFrames>0)
{
p_quad->GAMMAP=0.25;
p_quad->BETAP=0.9;
}
else
{
p_quad->GAMMAP=0.5;
p_quad->BETAP=0.5;
}
main
encode_sequence
encode_one_frame
perform_encode_frame
rc_init_frame
rc_init_pict
p_quad->Target = (int) (floor( p_quad->Wp * p_gen->RemainingBits / (p_quad->Np * p_quad->Wp + p_quad->Nb * p_quad->Wb) + 0.5));
tmp_T = imax(0, (int) (floor(p_quad->bit_rate / p_quad->frame_rate - p_quad->GAMMAP * (p_gen->CurrentBufferFullness-p_quad->TargetBufferLevel) + 0.5)));
p_quad->Target = (int) (floor(p_quad->BETAP * (p_quad->Target - tmp_T) + tmp_T + 0.5));
main-encode_sequence-encode_one_frame-perform_encode_frame-rc_init_frame-rc_init_pict-rc_updateQP
/* predict the MAD of current picture*/
p_quad->CurrentFrameMAD = p_quad->MADPictureC1*p_quad->PreviousPictureMAD + p_quad->MADPictureC2;
/*compute the number of bits for the texture*/
if(p_quad->Target < 0)
{
p_quad->m_Qc=m_Qp+MaxQpChange;
p_quad->m_Qc = iClip3(p_Vid->RCMinQP + p_quad->bitdepth_qp_scale, p_Vid->RCMaxQP + p_quad->bitdepth_qp_scale, p_quad->m_Qc); // Clipping
}
else
{
m_Bits = p_quad->Target-m_Hp;
m_Bits = imax(m_Bits, (int)(p_quad->bit_rate/(MINVALUE*p_quad->frame_rate)));
updateModelQPFrame( p_quad, m_Bits );
dtmp = p_quad->CurrentFrameMAD * p_quad->m_X1 * p_quad->CurrentFrameMAD * p_quad->m_X1
+ 4 * p_quad->m_X2 * p_quad->CurrentFrameMAD * m_Bits;
if ((p_quad->m_X2 == 0.0) || (dtmp < 0) || ((sqrt (dtmp) - p_quad->m_X1 * p_quad->CurrentFrameMAD) <= 0.0)) // fall back 1st order mode
m_Qstep = (float) (p_quad->m_X1 * p_quad->CurrentFrameMAD / (double) m_Bits);
else // 2nd order mode
m_Qstep = (float) ((2 * p_quad->m_X2 * p_quad->CurrentFrameMAD) / (sqrt (dtmp) - p_quad->m_X1 * p_quad->CurrentFrameMAD));
p_quad->m_Qc = Qstep2QP(m_Qstep, p_quad->bitdepth_qp_scale);
p_quad->m_Qc = iClip3(p_Vid->RCMinQP + p_quad->bitdepth_qp_scale, p_Vid->RCMaxQP + p_quad->bitdepth_qp_scale, p_quad->m_Qc); // clipping
p_quad->m_Qc = iClip3(m_Qp-MaxQpChange, m_Qp+MaxQpChange, p_quad->m_Qc); // control variation
}
更新MAD线性预测模型的参数
main-encode_sequence-encode_one_frame-rc_update_pict_frame-rc_update_picture-rc_update_pict-updateRCModel-updateMADModel
更新二次R-D模型的参数
main-encode_sequence-encode_one_frame-rc_update_pict_frame-rc_update_picture-rc_update_pict-updateRCModel
更新缓冲充盈度
main
encode_sequence
encode_one_frame
rc_update_pict_frame
rc_update_picture
rc_update_pict
int delta_bits = (nbits - (int)floor(p_quad->bit_rate / p_quad->frame_rate + 0.5F) );
// remaining # of bits in GOP
p_gen->RemainingBits -= nbits;
p_gen->CurrentBufferFullness += delta_bits;
本文完整pdf文档下载地址链接http://download.csdn.net/detail/nonmarking/8876649