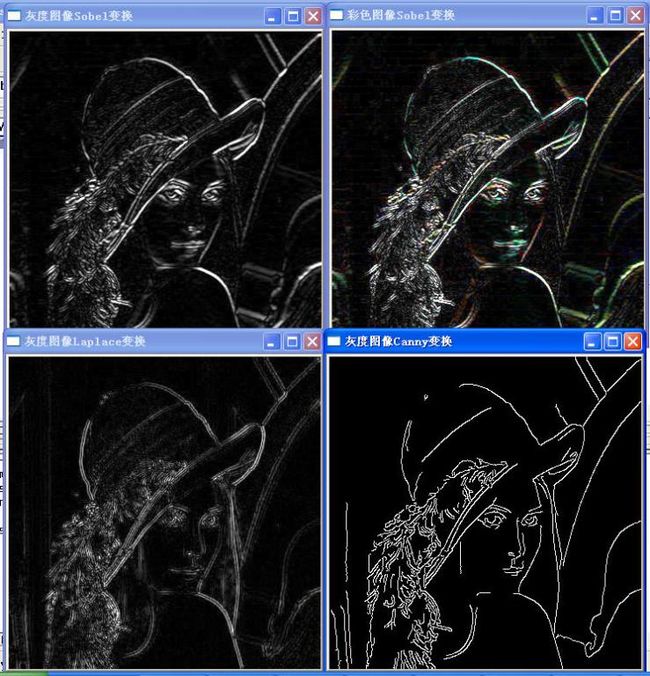
图像边缘检测Sobel,Laplace,Canny
#include "cv.h"
#include "cxcore.h"
#include "highgui.h"
void main()
{
IplImage * pImage=NULL;
IplImage * pImage8uGray=NULL;
IplImage * pImage8uSmooth=NULL;
IplImage * pImage16uGraySobel=NULL;
IplImage * pImage8uGraySobelShow=NULL;
IplImage * pImagePlanes[3]={NULL,NULL,NULL};
IplImage * pImage16uColorSobel=NULL;
IplImage * pImage8uColorSobelShow=NULL;
IplImage * pImage16uGrayLaplace=NULL;
IplImage * pImage8uGrayLaplaceShow=NULL;
IplImage * pImage8uGrayCanny=NULL;
//==================灰度图像Sobel变换=====================
pImage=cvLoadImage("lena.jpg",-1);
pImage8uGray=cvCreateImage(cvGetSize(pImage),IPL_DEPTH_8U,1);
pImage8uSmooth=cvCreateImage(cvGetSize(pImage),IPL_DEPTH_8U,1);
pImage8uGraySobelShow=cvCreateImage(cvGetSize(pImage),IPL_DEPTH_8U,1);
//转灰度
cvCvtColor(pImage,pImage8uGray,CV_BGR2GRAY);
//高斯滤波
cvSmooth(pImage8uGray,pImage8uSmooth,CV_GAUSSIAN,3,0,0);
//cvSobel要求目标图像必须是IPL_DEPTH_16S
pImage16uGraySobel=cvCreateImage(cvGetSize(pImage),IPL_DEPTH_16S,1);
//计算一阶x方向的差分,也可以计算一阶y方向
cvSobel(pImage8uSmooth,pImage16uGraySobel,0,1,3);
//再把格式转回来,用于显示
cvConvertScaleAbs(pImage16uGraySobel,pImage8uGraySobelShow,1,0);
cvNamedWindow("灰度图像Sobel变换",CV_WINDOW_AUTOSIZE);
cvShowImage("灰度图像Sobel变换",pImage8uGraySobelShow);
//==================彩色图像Sobel变换=====================
int i;
for (i=0;i<3;i++)
{
pImagePlanes[i]=cvCreateImage(cvGetSize(pImage),IPL_DEPTH_8U,1);
}
pImage16uColorSobel=cvCreateImage(cvGetSize(pImage),IPL_DEPTH_16S,1);
pImage8uColorSobelShow=cvCreateImage(cvGetSize(pImage),IPL_DEPTH_8U,3);
//分成3个单通道
cvCvtPixToPlane(pImage,pImagePlanes[0],pImagePlanes[1],pImagePlanes[2],NULL);
for (i=0;i<3;i++)
{
cvSobel(pImagePlanes[i],pImage16uColorSobel,0,1,3);
cvConvertScaleAbs(pImage16uColorSobel,pImagePlanes[i],1,0);
}
cvCvtPlaneToPix(pImagePlanes[0],pImagePlanes[1],pImagePlanes[2],NULL
,pImage8uColorSobelShow);
cvNamedWindow("彩色图像Sobel变换",CV_WINDOW_AUTOSIZE);
cvShowImage("彩色图像Sobel变换",pImage8uColorSobelShow);
//==================灰度图像Laplace变换=====================
pImage16uGrayLaplace=cvCreateImage(cvGetSize(pImage),IPL_DEPTH_16S,1);
pImage8uGrayLaplaceShow=cvCreateImage(cvGetSize(pImage),IPL_DEPTH_8U,1);
cvLaplace(pImage8uSmooth,pImage16uGrayLaplace,3);
cvConvertScaleAbs(pImage16uGrayLaplace,pImage8uGrayLaplaceShow,1,0);
cvNamedWindow("灰度图像Laplace变换",CV_WINDOW_AUTOSIZE);
cvShowImage("灰度图像Laplace变换",pImage8uGrayLaplaceShow);
//==================灰度图像Canny变换=====================
pImage8uGrayCanny=cvCreateImage(cvGetSize(pImage),IPL_DEPTH_8U,1);
cvCanny(pImage8uSmooth,pImage8uGrayCanny,100,200,3);
cvNamedWindow("灰度图像Canny变换",CV_WINDOW_AUTOSIZE);
cvShowImage("灰度图像Canny变换",pImage8uGrayCanny);
cvWaitKey(0);
cvDestroyWindow("灰度图像Sobel变换");
cvDestroyWindow("彩色图像Sobel变换");
cvDestroyWindow("灰度图像Laplace变换");
cvReleaseImage(&pImage);
cvReleaseImage(&pImage8uGray);
cvReleaseImage(&pImage8uSmooth);
cvReleaseImage(&pImage16uGraySobel);
cvReleaseImage(&pImage8uGraySobelShow);
cvReleaseImage(&pImage16uColorSobel);
cvReleaseImage(&pImage8uColorSobelShow);
cvReleaseImage(&pImagePlanes[0]);
cvReleaseImage(&pImagePlanes[1]);
cvReleaseImage(&pImagePlanes[2]);
cvReleaseImage(&pImage16uGrayLaplace);
cvReleaseImage(&pImage8uGrayLaplaceShow);
}