图像放大并进行BiCubic插值
BiCubic插值原理:
构造BiCubic函数:
其中,a取-0.5.
[source: http://en.wikipedia.org/wiki/Bicubic_interpolation]
BiCubic函数具有如下形状:
[source: R. Keys, (1981). "Cubic convolution interpolation for digital image processing". IEEE Transactions on Signal Processing, Acoustics, Speech, and Signal Processing 29 (6): 1153–1160.]
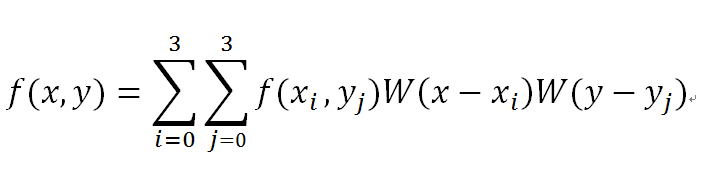
对待插值的像素点(x,y)(x和y可以为浮点数),取其附近的4x4邻域点(xi,yj), i,j = 0,1,2,3。按如下公式进行插值计算:
实现代码:
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <iostream>
#include <cmath>
#include <fstream>
using namespace cv;
using namespace std;
#define PI 3.14159265
float BiCubicPoly(float x);
void MyScaleBiCubicInter(Mat& src, Mat& dst, float TransMat[3][3]);
/**
* @function main
*/
int main( int argc, char** argv )
{
// load image
char* imageName = "images/Lenna_256.png";
Mat image;
image = imread(imageName,1);
if(!image.data)
{
cout << "No image data" << endl;
return -1;
}
// show image
namedWindow("image", CV_WINDOW_AUTOSIZE);
imshow("image", image);
Mat dst;
float transMat[3][3] = { {2.0, 0, 0}, {0, 2.0, 0}, {0, 0, 1} };
MyScaleBiCubicInter(image, dst, transMat);
namedWindow("out_image", CV_WINDOW_AUTOSIZE);
imshow("out_image", dst);
imwrite("Lenna_scale_biCubic2.jpg", dst);
waitKey(0);
return 0;
}
float BiCubicPoly(float x)
{
float abs_x = abs(x);
float a = -0.5;
if( abs_x <= 1.0 )
{
return (a+2)*pow(abs_x,3) - (a+3)*pow(abs_x,2) + 1;
}
else if( abs_x < 2.0 )
{
return a*pow(abs_x,3) - 5*a*pow(abs_x,2) + 8*a*abs_x - 4*a;
}
else
return 0.0;
}
void MyScaleBiCubicInter(Mat& src, Mat& dst, float TransMat[3][3])
{
CV_Assert(src.data);
CV_Assert(src.depth() != sizeof(uchar));
// calculate margin point of dst image
float left = 0;
float right = 0;
float top = 0;
float down = 0;
float x = src.cols * 1.0f;
float y = 0.0f;
float u1 = x * TransMat[0][0] + y * TransMat[0][1];
float v1 = x * TransMat[1][0] + y * TransMat[1][1];
x = src.cols * 1.0f;
y = src.rows * 1.0f;
float u2 = x * TransMat[0][0] + y * TransMat[0][1];
float v2 = x * TransMat[1][0] + y * TransMat[1][1];
x = 0.0f;
y = src.rows * 1.0f;
float u3 = x * TransMat[0][0] + y * TransMat[0][1];
float v3 = x * TransMat[1][0] + y * TransMat[1][1];
left = min( min( min(0.0f,u1), u2 ), u3);
right = max( max( max(0.0f,u1), u2 ), u3);
top = min( min( min(0.0f,v1), v2 ), v3);
down = max( max( max(0.0f,v1), v2 ), v3);
// create dst image
dst.create(int(abs(right-left)), int(abs(down-top)), src.type());
CV_Assert( dst.channels() == src.channels() );
int channels = dst.channels();
int i,j;
uchar* p;
uchar* q0;
uchar* q1;
uchar* q2;
uchar* q3;
for( i = 0; i < dst.rows; ++i)
{
p = dst.ptr<uchar>(i);
for ( j = 0; j < dst.cols; ++j)
{
//
x = (j+left)/TransMat[0][0] ;
y = (i+top)/TransMat[1][1] ;
int x0 = int(x) - 1;
int y0 = int(y) - 1;
int x1 = int(x);
int y1 = int(y);
int x2 = int(x) + 1;
int y2 = int(y) + 1;
int x3 = int(x) + 2;
int y3 = int(y) + 2;
if( (x0 >= 0) && (x3 < src.cols) && (y0 >= 0) && (y3 < src.rows) )
{
q0 = src.ptr<uchar>(y0);
q1 = src.ptr<uchar>(y1);
q2 = src.ptr<uchar>(y2);
q3 = src.ptr<uchar>(y3);
float dist_x0 = BiCubicPoly(x-x0);
float dist_x1 = BiCubicPoly(x-x1);
float dist_x2 = BiCubicPoly(x-x2);
float dist_x3 = BiCubicPoly(x-x3);
float dist_y0 = BiCubicPoly(y-y0);
float dist_y1 = BiCubicPoly(y-y1);
float dist_y2 = BiCubicPoly(y-y2);
float dist_y3 = BiCubicPoly(y-y3);
float dist_x0y0 = dist_x0 * dist_y0;
float dist_x0y1 = dist_x0 * dist_y1;
float dist_x0y2 = dist_x0 * dist_y2;
float dist_x0y3 = dist_x0 * dist_y3;
float dist_x1y0 = dist_x1 * dist_y0;
float dist_x1y1 = dist_x1 * dist_y1;
float dist_x1y2 = dist_x1 * dist_y2;
float dist_x1y3 = dist_x1 * dist_y3;
float dist_x2y0 = dist_x2 * dist_y0;
float dist_x2y1 = dist_x2 * dist_y1;
float dist_x2y2 = dist_x2 * dist_y2;
float dist_x2y3 = dist_x2 * dist_y3;
float dist_x3y0 = dist_x3 * dist_y0;
float dist_x3y1 = dist_x3 * dist_y1;
float dist_x3y2 = dist_x3 * dist_y2;
float dist_x3y3 = dist_x3 * dist_y3;
switch(channels)
{
case 1:
{
break;
}
case 3:
{
p[3*j] = (uchar)(q0[3*x0] * dist_x0y0 +
q1[3*x0] * dist_x0y1 +
q2[3*x0] * dist_x0y2 +
q3[3*x0] * dist_x0y3 +
q0[3*x1] * dist_x1y0 +
q1[3*x1] * dist_x1y1 +
q2[3*x1] * dist_x1y2 +
q3[3*x1] * dist_x1y3 +
q0[3*x2] * dist_x2y0 +
q1[3*x2] * dist_x2y1 +
q2[3*x2] * dist_x2y2 +
q3[3*x2] * dist_x2y3 +
q0[3*x3] * dist_x3y0 +
q1[3*x3] * dist_x3y1 +
q2[3*x3] * dist_x3y2 +
q3[3*x3] * dist_x3y3 ) ;
p[3*j+1] = (uchar)(q0[3*x0+1] * dist_x0y0 +
q1[3*x0+1] * dist_x0y1 +
q2[3*x0+1] * dist_x0y2 +
q3[3*x0+1] * dist_x0y3 +
q0[3*x1+1] * dist_x1y0 +
q1[3*x1+1] * dist_x1y1 +
q2[3*x1+1] * dist_x1y2 +
q3[3*x1+1] * dist_x1y3 +
q0[3*x2+1] * dist_x2y0 +
q1[3*x2+1] * dist_x2y1 +
q2[3*x2+1] * dist_x2y2 +
q3[3*x2+1] * dist_x2y3 +
q0[3*x3+1] * dist_x3y0 +
q1[3*x3+1] * dist_x3y1 +
q2[3*x3+1] * dist_x3y2 +
q3[3*x3+1] * dist_x3y3 ) ;
p[3*j+2] = (uchar)(q0[3*x0+2] * dist_x0y0 +
q1[3*x0+2] * dist_x0y1 +
q2[3*x0+2] * dist_x0y2 +
q3[3*x0+2] * dist_x0y3 +
q0[3*x1+2] * dist_x1y0 +
q1[3*x1+2] * dist_x1y1 +
q2[3*x1+2] * dist_x1y2 +
q3[3*x1+2] * dist_x1y3 +
q0[3*x2+2] * dist_x2y0 +
q1[3*x2+2] * dist_x2y1 +
q2[3*x2+2] * dist_x2y2 +
q3[3*x2+2] * dist_x2y3 +
q0[3*x3+2] * dist_x3y0 +
q1[3*x3+2] * dist_x3y1 +
q2[3*x3+2] * dist_x3y2 +
q3[3*x3+2] * dist_x3y3 ) ;
float thre = 198.0f;
if( (abs(p[3*j]-q1[3*x1]) > thre) || (abs(p[3*j+1]-q1[3*x1+1]) > thre) ||
(abs(p[3*j+2]-q1[3*x1+2]) > thre) )
{
p[3*j] = q1[3*x1];
p[3*j+1] = q1[3*x1+1];
p[3*j+2] = q1[3*x1+2];
}
break;
}
}
}
}
}
}