Android系统启动过程
Android启动linux内核过程:
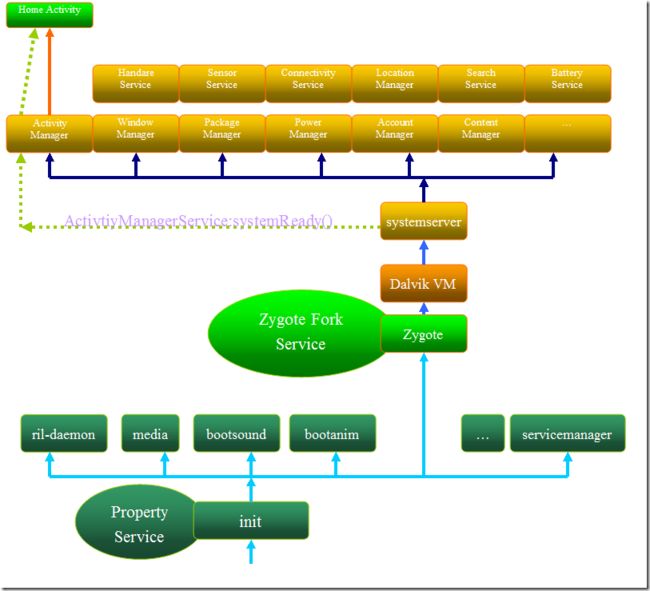
init 进程启动 -> Native服务启动 -> System Server/Android 服务启动 -> Home 启动
init进程启动:
源文件目录:system/core/init/init.c
int main(int argc, char **argv)
{
int fd_count = 0;
struct pollfd ufds[4];
char *tmpdev;
char* debuggable;
char tmp[32];
int property_set_fd_init = 0;
int signal_fd_init = 0;
int keychord_fd_init = 0;
if (!strcmp(basename(argv[0]), "ueventd"))
return ueventd_main(argc, argv);
/* clear the umask */
umask(0);
/* Get the basic filesystem setup we need put
* together in the initramdisk on / and then we'll
* let the rc file figure out the rest.
*/
mkdir("/dev", 0755);
mkdir("/proc", 0755);
mkdir("/sys", 0755);
mount("tmpfs", "/dev", "tmpfs", 0, "mode=0755");
mkdir("/dev/pts", 0755);
mkdir("/dev/socket", 0755);
mount("devpts", "/dev/pts", "devpts", 0, NULL);
mount("proc", "/proc", "proc", 0, NULL);
mount("sysfs", "/sys", "sysfs", 0, NULL);
/* We must have some place other than / to create the
* device nodes for kmsg and null, otherwise we won't
* be able to remount / read-only later on.
* Now that tmpfs is mounted on /dev, we can actually
* talk to the outside world.
*/
open_devnull_stdio();
log_init();
INFO("reading config file\n");
init_parse_config_file("/init.rc");//通过init.rc脚本建立基本服务
/* pull the kernel commandline and ramdisk properties file in */
import_kernel_cmdline(0);
get_hardware_name(hardware, &revision);
snprintf(tmp, sizeof(tmp), "/init.%s.rc", hardware);
init_parse_config_file(tmp);//通过init.xxx.rc脚本建立基本服务,硬件相关
action_for_each_trigger("early-init", action_add_queue_tail);
queue_builtin_action(wait_for_coldboot_done_action, "wait_for_coldboot_done");
queue_builtin_action(property_init_action, "property_init");
queue_builtin_action(keychord_init_action, "keychord_init");
queue_builtin_action(console_init_action, "console_init");
queue_builtin_action(set_init_properties_action, "set_init_properties");
/* execute all the boot actions to get us started */
action_for_each_trigger("init", action_add_queue_tail);
action_for_each_trigger("early-fs", action_add_queue_tail);
action_for_each_trigger("fs", action_add_queue_tail);
action_for_each_trigger("post-fs", action_add_queue_tail);
queue_builtin_action(property_service_init_action, "property_service_init");
queue_builtin_action(signal_init_action, "signal_init");
queue_builtin_action(check_startup_action, "check_startup");
/* execute all the boot actions to get us started */
action_for_each_trigger("early-boot", action_add_queue_tail);
action_for_each_trigger("boot", action_add_queue_tail);
/* run all property triggers based on current state of the properties */
queue_builtin_action(queue_property_triggers_action, "queue_propety_triggers");
#if BOOTCHART
queue_builtin_action(bootchart_init_action, "bootchart_init");
#endif
for(;;) {
int nr, i, timeout = -1;
execute_one_command();
restart_processes();
if (!property_set_fd_init && get_property_set_fd() > 0) {
ufds[fd_count].fd = get_property_set_fd();
ufds[fd_count].events = POLLIN;
ufds[fd_count].revents = 0;
fd_count++;
property_set_fd_init = 1;
}
if (!signal_fd_init && get_signal_fd() > 0) {
ufds[fd_count].fd = get_signal_fd();
ufds[fd_count].events = POLLIN;
ufds[fd_count].revents = 0;
fd_count++;
signal_fd_init = 1;
}
if (!keychord_fd_init && get_keychord_fd() > 0) {
ufds[fd_count].fd = get_keychord_fd();
ufds[fd_count].events = POLLIN;
ufds[fd_count].revents = 0;
fd_count++;
keychord_fd_init = 1;
}
if (process_needs_restart) {
timeout = (process_needs_restart - gettime()) * 1000;
if (timeout < 0)
timeout = 0;
}
if (!action_queue_empty() || cur_action)
timeout = 0;
#if BOOTCHART
if (bootchart_count > 0) {
if (timeout < 0 || timeout > BOOTCHART_POLLING_MS)
timeout = BOOTCHART_POLLING_MS;
if (bootchart_step() < 0 || --bootchart_count == 0) {
bootchart_finish();
bootchart_count = 0;
}
}
#endif
nr = poll(ufds, fd_count, timeout);
if (nr <= 0)
continue;
for (i = 0; i < fd_count; i++) {
if (ufds[i].revents == POLLIN) {
if (ufds[i].fd == get_property_set_fd())
handle_property_set_fd();
else if (ufds[i].fd == get_keychord_fd())
handle_keychord();
else if (ufds[i].fd == get_signal_fd())
handle_signal();
}
}
}
return 0;
}
通过查看网络资料,发现init.rc/init.xxx.rc建立的基本服务为:servicemanager,zygote……
最后Init并不退出,而是担当起property service的功能。
脚本文件
init@System/Core/Init
Init.c: parse_config_file(Init.rc)
@parse_config_file(Init.marvel.rc)
解析脚本文件:Init.rc和Init.xxxx.rc(硬件平台相关)
Init.rc是Android自己规定的初始化脚本(Android Init Language, System/Core/Init/readme.txt)
该脚本包含四个类型的声明:
Actions
Commands
Services
Options.
服务启动机制
Init是这样解析.rc文件开启服务的:
(1)打开.rc文件,解析文件内容(system\core\init\init.c)
将service信息放置到service_list中。( system\core\init parser.c)
(2)restart_service()( system\core\init\init.c)
service_start
execve(…).建立service进程。
zygote
Servicemanager和zygote进程就奠定了Android的基础。zygote这个进程起来才会建立起真正的Android运行空间,初始化建立的Service都是Navtive service.在.rc脚本文件中zygote的描述:
service zygote /system/bin/app_process -Xzygote /system/bin --zygote --start-system-server
所以Zygote从main(…)@frameworks\base\cmds\app_main.cpp开始。
(1) main(…)@frameworks\base\cmds\app_main.cpp
建立Java Runtime
runtime.start("com.android.internal.os.ZygoteInit", startSystemServer);
(2) [email protected]
建立虚拟机
运行:com.android.internal.os.ZygoteInit:main函数。
(3)main()@com.android.internal.os.ZygoteInit//正真的Zygote。
registerZygoteSocket();//登记Listen端口
startSystemServer();
进入Zygote服务框架。
经过这几个步骤,Zygote就建立好了,利用Socket通讯,接收ActivityManangerService的请求,Fork应用程序。
System Server
[email protected]在Zygote上fork了一个进程: com.android.server.SystemServer.于是SystemServer@(SystemServer.java)就建立了。Android的所有服务循环框架都是建立SystemServer@(SystemServer.java)上。在SystemServer.java中看不到循环结构,只是可以看到建立了init2的实现函数,建立了一大堆服务,并AddService到service Manager。
main() @ com/android/server/SystemServer
{
init1();
}
Init1()是在Native空间实现的(com_andoird_server_systemServer.cpp)。我们一看这个函数就知道了,init1->system_init() @System_init.cpp
在system_init()我们看到了循环闭合管理框架。
{
Call "com/android/server/SystemServer", "init2"
…..
ProcessState::self()->startThreadPool();
IPCThreadState::self()->joinThreadPool();
}
init2()@SystemServer.java中建立了Android中所有要用到的服务。
这个init2()建立了一个线程,来New Service和AddService来建立服务
Home启动
在[email protected]后半段,我们可以看到系统在启动完所有的Android服务后,做了这样一些动作:
(1) 使用xxx.systemReady()通知各个服务,系统已经就绪。
(2) 特别对于ActivityManagerService.systemReady(回调)
Widget.wallpaper,imm(输入法)等ready通知。
Home就是在ActivityManagerService.systemReady()通知的过程中建立的。下面是ActivityManagerService.systemReady()的伪代码:
systemReady()@ActivityManagerService.java
resumeTopActivityLocked()
startHomeActivityLocked();//如果是第一个则启动HomeActivity。
startActivityLocked(。。。)CATEGORY_HOME
android 启动示意图: