【物联网智能网关-11】流式驱动之用户驱动(MDK C++开发)
微软体系的产品给人的感觉一直是易学易用,但是其执行性能却屡受诟病。所以一些对性能要求相对较高的硬件产品研发,一般都是采用linux体系的技术,或者是无操作系统开发,其开发语言也绝大数是C/C++(启动代码或中断部分的代码有时会用汇编代码实现)。但是对工控集成类的项目开发来说,由于项目开发周期比较短,对稳定性要求比较高,如果全部采用C/C++开发,不仅对开发人员的能力要求比较高,并且开发和调试的代价非常大。所以PC平台的,大都是用组态系统搭建,嵌入式系统则是采用嵌入式组态软件,其定制化的软件则采用WinCE等易用的嵌入式系统来开发了,但是对再小型的嵌入式系统,由于选择目前比较少,也只有选用传统的C/C++来开发了。
2001年.NET MicroFramework的开始研发,其实就是基于比尔盖茨所谓的.NET战略,上至服务器大型系统,下至嵌入式领域的芯片都希望是.NET系统,都可以用C#等.NET开发语言进行开发。所以最开始.NET MicroFramework系统就是开发硬件产品的,MSNDirect产品、SideShow,还有一些高端遥控器,键盘,都是采用.NET Micro Framework系统开发(相关介绍,请参见《MSN Direct项目简介》),虽然用.NET MicroFramework系统开发比较容易,但是要达到同样的性能,必须要求系统的主频更快,RAM更大,这对批量生产的硬件产品来说,长远发展来看,不是一个好选择。
我个人认为微软官方的.NET Micro Framework产品类开发的定位是错误的,这一点我可以看到微软在Windows领域的开发也是放弃了全用.NET托管代码实现的诉求,大部分底层或对性能要求很高的代码,依然采用原生C/C++实现(目前iOS和安卓系统的开发,基于性能的考虑,很多开发人员都开始用原生C/C++进行开发)。
用.NET Micro Framework开发用户需求变化少,不需要二次开发接口的产品来说,是非常不适合的,特别是销售量数量非常大的产品,因为随着产品的销量不断增加,前期开发成本所占的成本比重将越来越小。但是对用户需求变化大,用户需要有二次开发,或者是销量比较少的产品来说,用.NET MicroFramework优势就比较明显了。特别是工控集成类的产品,.NET Micro Framework系统有天然的优势(这是我7年工控领域的工作经历深切感受到的)。
PC领域的组态化技术已经非常成熟了,目前已经在向组态软件的第二代或第三代进行发展。但是在嵌入式领域,特别是低端MCU方面,这方面做得远远不够,我工作的定位就是致力于嵌入式领域组态化,并且我认为.NET Micro Framework系统是实现这个愿景的最好的一种技术支撑。
.NET Micro Framework的平台的C#(或VB.NET)开发虽然开发比较简单,但是其执行性能却是一个必须面对的问题(2009年我在微软总部和MSNDirect开发人员交流的时候,他们对.NETMicro Framework的执行性能颇有微词)。
我的解决方案就是:.NET Micro Framework必须尽可能的封装,C#语言执行的不是大段功能代码,而只是一些工艺流程代码即可,那些功能性的代码尽可能用C/C++实现。C#起到粘连串接的作用即可,这一点和网页开发中的脚本语言的角色非常类似。
目前这类封装,必须是porting开发人员完成,是.NETMicro Framework TinyCLR的不可分的部分,普通用户是不能进行C/C++开发的。而我这篇文章所介绍的重点,就是为普通的开发用户,开启C/C++ 基于.NET MicroFramework编程之门。 在《.NETMicro Framework动态调用C/C++底层代码》文章中我介绍了这种技术的实现原理,本篇文章就是基于应用的角度,介绍如果用MDK进行.NET MicroFramework用户驱动开发。
在进行用户流式驱动开发介绍之前,我先比较一下C#和C++开发的性能,让大家有一个直观的感受。
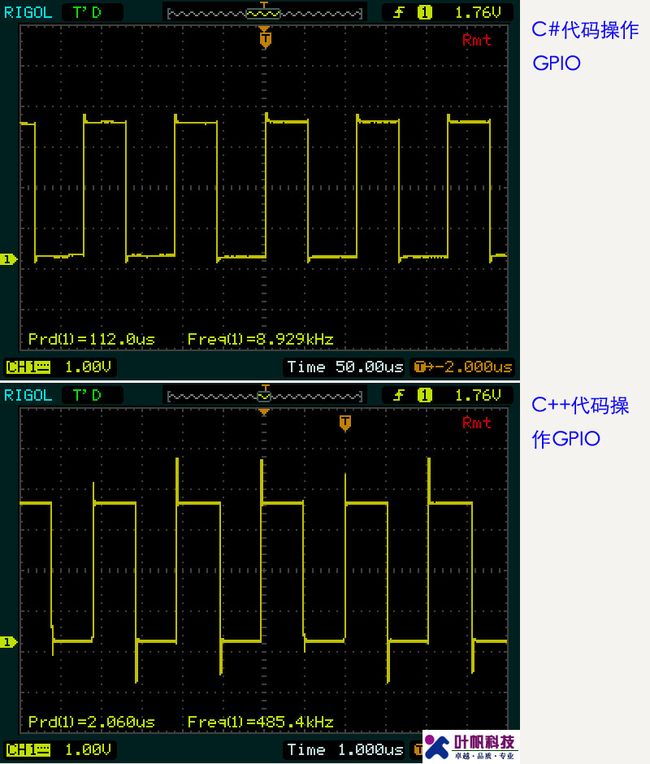
上图C#代码如下:
OutputPort io = newOutputPort((Cpu.Pin)GPIO_NAMES.PA6,false);
while (true)
{
io.Write(true);
io.Write(false);
}
C++的代码如下(NativeSample下运行)
CPU_GPIO_EnableOutputPin(STM32F20x_GPIO_Driver::PA6,FALSE);
while(TRUE)
{
CPU_GPIO_SetPinState(STM32F20x_GPIO_Driver::PA6,FALSE);
CPU_GPIO_SetPinState(STM32F20x_GPIO_Driver::PA6,TRUE);
}
硬件平台采用紫藤207(STM32F207 主频120M),通过示波器检查PA6管脚。
从示波器的显示结果来看,二者相差近60倍,所以说在C#层很难实现微秒级别的控制。
另外我也比较了一下C#和C++的for循环的执行效率。
代码很简单,就是:for(x=0;x<1000;x++);
执行次数 |
C# |
C++ |
倍数 |
10 |
316us |
- |
- |
100 |
2.5ms |
3.5us |
714 |
1000 |
24ms |
33us |
727 |
10000 |
- |
333us |
- |
C#层提供的Sleep延时也是毫秒级别的,我做了一个简单的测试,结果如下:
Sleep参数 |
0 |
1 |
10 |
执行时间 |
176-184 us |
1.3ms |
10.4ms |
注:由于底层时钟中断不断触发,Sleep的时间是不确定的。
相信以上的测试结果,对大家的印象是深刻的。所以说,不考虑C#的封装优点,而是非要用C#和C++实现同样的功能,只能是让大家越来越远离.NET Micro Framework。
-------- 分割线 ---------
在《.NET Micro Framework动态调用C/C++底层代码》这篇文章中,我介绍g_GeneralStream_Function的时候,其支持的函数才15个,并且主要是GPIO和时钟类的函数,这次调整以后,已经扩展支持61个了,并且也可以传递初始化函数的字符串或整型变量参数了,新的g_GeneralStream_Function定义如下:
IGeneralStream_Functiong_GeneralStream_Function =
{
-1,
NULL,
//--
&Notice_GenerateEvent,
&lcd_printf,
&debug_printf,
&HAL_Time_Sleep_MicroSeconds_InterruptEnabled,
&Events_WaitForEvents,
&disable_interrupts,
&enable_interrupts,
&private_malloc,
&private_free,
//mem
&hal_snprintf,
&hal_stricmp,
&hal_strncmp_s,
&hal_strlen_s,
&memcpy,
&memset,
//Flash
&YFSoft_Flash_Erase,
&YFSoft_Flash_Read,
&YFSoft_Flash_Write,
//GPIO
&CPU_GPIO_DisablePin,
&CPU_GPIO_EnableInputPin,
&CPU_GPIO_EnableOutputPin,
&CPU_GPIO_GetPinState,
&CPU_GPIO_SetPinState,
//TIMER
&CPU_TIMER_Initialize,
&CPU_TIMER_Uninitialize,
&CPU_TIMER_Start,
&CPU_TIMER_Stop,
&CPU_TIMER_GetState,
&CPU_TIMER_SetState,
//USART
&USART_Initialize,
&USART_Uninitialize,
&USART_Write,
&USART_Read,
&USART_Flush,
&USART_BytesInBuffer,
&USART_DiscardBuffer,
//DA/AD
&DA_Initialize,
&DA_Write,
&AD_Initialize,
&AD_Read,
//PWM
&PWM_Initialize,
&PWM_Uninitialize,
&PWM_ApplyConfiguration,
&PWM_Start,
&PWM_Stop,
&PWM_GetPinForChannel,
//TinyGUI
&LCD_ClearEx,
&LCD_SetPixel,
&LCD_GetPixel,
&LCD_DrawLine,
&LCD_DrawRectangle,
&LCD_DrawEllipse,
&LCD_DrawImage,
&LCD_DrawImageEx,
&LCD_DrawString,
&LCD_DrawStringEx,
&LCD_FillRectangle,
&LCD_FillEllipse,
&LCD_GetFrameBufferEx,
&LCD_SuspendLayout,
&LCD_ResumeLayout,
};
有了这些函数支持,就可以在MDK中独立编写 MF的用户流驱动了。当然,你也可以不用这些函数,也可以调用MDK相关的库或STM32提供的库,直接通过寄存器对硬件进行操作(前提是和已有的功能不要冲突就行)。
为了便于在MDK 4.x中开发用户流式驱动,我提供了yfmflib.h和grenralstream.h头文件,也提供了一个UserDriver.cpp模板,用户只要简单修改一下即可。
UserDriver.cpp模板中的代码如下:
//说明:代码空间0x08010000 - 0x08020000 64K
// 内存空间 0x20002000- 0x20004000 8K
#include "YFMFLib.h"
#include"GeneralStream.h"
#define UserDriver_Flag "UserDriver"
#define UserDriver_Hander 1
const IGeneralStream_Function*MF=NULL;
intGeneralStream_Open1_UserDriver(LPCSTR config) { return 0;} //Open1永远也不会被调用
//intGeneralStream_Open2_UserDriver(int config) { return 0;}
intGeneralStream_Close_UserDriver() {return 0;}
intGeneralStream_IOControl1_UserDriver(int code, BYTE *inBuffer, int inCount, BYTE*outBuffer, int outCount){return -1;}
intGeneralStream_IOControl2_UserDriver(int code, int parameter){return -1;}
intGeneralStream_Read_UserDriver(BYTE *buffer, int offset, int count){return -1;}
intGeneralStream_Write_UserDriver(BYTE *buffer, int offset, int count){return -1;}
intGeneralStream_Open2_UserDriver(int config)
{
//获取系统函数的指针
MF = (IGeneralStream_Function*)config;
//C#下传的参数
MF->lcd_printf("%d,%s\r\n",MF->iParam1,MF->sParam1);
MF->debug_printf("%d,%s\r\n",MF->iParam1,MF->sParam1);
}
extern const IGeneralStreamg_GeneralStream_UserDriver;
const IGeneralStreamg_GeneralStream_UserDriver =
{
UserDriver_Flag,
&GeneralStream_Open1_UserDriver,
&GeneralStream_Open2_UserDriver,
&GeneralStream_Close_UserDriver,
&GeneralStream_IOControl1_UserDriver,
&GeneralStream_IOControl2_UserDriver,
&GeneralStream_Read_UserDriver,
&GeneralStream_Write_UserDriver,
};
为了让大家印象深刻,我们以LCD1602的驱动为示例,进行用户驱动编写(我已经为其专门开发了一个流式驱动,以其为例只是便于说明,后续还将详细介绍LCD1602)。
其实LCD1602的显示就是IO操作,其实理论上在C#层也可以实现,但是通过我以上的性能测试,估计大家会鲜有尝试了。LCD1602的驱动,通过上网搜索,无论是C51、STM32还是Arduino都提供了相关的源码,我们只要把相关的IO操作的函数,转换为我们MF的IO操作函数即可。
主要代码如下:
void LCD1602_Write_byte(BYTE data)
{
MF->CPU_GPIO_SetPinState(LCD1602_E_Pin,TRUE);
MF->CPU_GPIO_SetPinState(LCD1602_D7_Pin,(data& 0x80)>0);
MF->CPU_GPIO_SetPinState(LCD1602_D6_Pin,(data& 0x40)>0);
MF->CPU_GPIO_SetPinState(LCD1602_D5_Pin,(data& 0x20)>0);
MF->CPU_GPIO_SetPinState(LCD1602_D4_Pin,(data& 0x10)>0);
MF->HAL_Time_Sleep_MicroSeconds_InterruptEnabled(1);
MF->CPU_GPIO_SetPinState(LCD1602_E_Pin,FALSE);
MF->HAL_Time_Sleep_MicroSeconds_InterruptEnabled(1);
MF->CPU_GPIO_SetPinState(LCD1602_E_Pin,TRUE);
MF->CPU_GPIO_SetPinState(LCD1602_D7_Pin,(data& 0x08)>0);
MF->CPU_GPIO_SetPinState(LCD1602_D6_Pin,(data& 0x04)>0);
MF->CPU_GPIO_SetPinState(LCD1602_D5_Pin,(data& 0x02)>0);
MF->CPU_GPIO_SetPinState(LCD1602_D4_Pin,(data& 0x01)>0);
MF->HAL_Time_Sleep_MicroSeconds_InterruptEnabled(1);
MF->CPU_GPIO_SetPinState(LCD1602_E_Pin,FALSE);
}
void LCD1602_Write_Command(BYTE cmd)
{
MF->HAL_Time_Sleep_MicroSeconds_InterruptEnabled(100);
MF->CPU_GPIO_SetPinState(LCD1602_RS_Pin,FALSE);
LCD1602_Write_byte(cmd);
}
void LCD1602_Write_Data(BYTE data)
{
MF->HAL_Time_Sleep_MicroSeconds_InterruptEnabled(100);
MF->CPU_GPIO_SetPinState(LCD1602_RS_Pin,TRUE);
LCD1602_Write_byte(data);
}
void LCD1602_SetXY(BYTE x,BYTE y)//x:0~15,y:0~1
{
if(y)LCD1602_Write_Command(0xc0+x);//第二行显示
else LCD1602_Write_Command(0x80+x);//第一行显示
}
void LCD1602_Write_Char(BYTE x,BYTE y,char data)
{
LCD1602_SetXY( x, y); //写地址
LCD1602_Write_Data(data);
}
void LCD1602_Print(BYTE x,BYTE y,char *s)
{
if(x>15)x=15;
LCD1602_SetXY( x, y ); //写地址
int i=0;
while (*s &&(x+i++)<16) //写显示字符
{
LCD1602_Write_Data(*s++ );
}
}
void LCD1602_Init()
{
MF->CPU_GPIO_SetPinState(LCD1602_RW_Pin,FALSE); //只写
MF->HAL_Time_Sleep_MicroSeconds_InterruptEnabled(100000);
LCD1602_Write_Command(0x33);
MF->HAL_Time_Sleep_MicroSeconds_InterruptEnabled(20000);
LCD1602_Write_Command(0x32);
MF->HAL_Time_Sleep_MicroSeconds_InterruptEnabled(20000);
LCD1602_Write_Command(0x28);
LCD1602_Write_Command(0x0C);//显示开
LCD1602_Write_Command(0x01);//清屏
MF->HAL_Time_Sleep_MicroSeconds_InterruptEnabled(20000);
}
以上就是LCD驱动相关的代码,下面我们填写接口代码
int GeneralStream_Open2_UserDriver(int obj)
{
//获取系统函数的指针
MF =(IGeneralStream_Function*)obj;
//--
LPCSTR config =MF->sParam1;
//不能有空格
// 012345678901234567890123456789012345678901234567890123
//格式RS=PC08,RW=PC09,E=PB06,D4=PB07,D5=PC00,D6=PC02,D7=PC03
if(config[3]!='P' ||config[11]!='P' || config[18]!='P' || config[26]!='P' || config[34]!='P' ||config[42]!='P' || config[50]!='P')
{
return -1;
}
LCD1602_RS_Pin =(GPIO_PIN)((config[4]-'A') * 16 +(config[5]-'0') * 10+ (config[6] - '0'));
LCD1602_RW_Pin =(GPIO_PIN)((config[12]-'A') * 16 +(config[13]-'0') * 10+ (config[14] - '0'));
LCD1602_E_Pin =(GPIO_PIN)((config[19]-'A') * 16 +(config[20]-'0') * 10+ (config[21] - '0'));
LCD1602_D4_Pin =(GPIO_PIN)((config[27]-'A') * 16 +(config[28]-'0') * 10+ (config[29] - '0'));
LCD1602_D5_Pin =(GPIO_PIN)((config[35]-'A') * 16 +(config[36]-'0') * 10+ (config[37] - '0'));
LCD1602_D6_Pin =(GPIO_PIN)((config[43]-'A') * 16 +(config[44]-'0') * 10+ (config[45] - '0'));
LCD1602_D7_Pin =(GPIO_PIN)((config[51]-'A') * 16 +(config[52]-'0') * 10+ (config[53] - '0'));
MF->CPU_GPIO_EnableOutputPin(LCD1602_RS_Pin,FALSE);
MF->CPU_GPIO_EnableOutputPin(LCD1602_RW_Pin,FALSE);
MF->CPU_GPIO_EnableOutputPin(LCD1602_E_Pin,FALSE);
MF->CPU_GPIO_EnableOutputPin(LCD1602_D4_Pin,FALSE);
MF->CPU_GPIO_EnableOutputPin(LCD1602_D5_Pin,FALSE);
MF->CPU_GPIO_EnableOutputPin(LCD1602_D6_Pin,FALSE);
MF->CPU_GPIO_EnableOutputPin(LCD1602_D7_Pin,FALSE);
LCD1602_Init(); //初始化液晶
return 0;
}
int GeneralStream_Write_UserDriver(BYTE *buffer, int offset, intcount)
{
UINT8 x =(BYTE)((offset>>8) & 0xFF);
UINT8 y = (BYTE)(offset &0xFF);
buffer[count]=0;
if(x>15 || y>1 ) return-1;
LCD1602_Print(x,y,(char*)buffer);
return 0;
}
以上代码在MDK中直接编译,编译后的bin文件,经过转换适当转换,变为MF部署工具所支持的Hex文件,用MFDeploy或YFAccessFlash工具直接部署即可,如下图所示:

基于C++的代码我们已经完成,下一步我们开始写C#代码,以便调用我们写好的C++代码。
代码如下:
using System;
usingMicrosoft.SPOT;
usingMicrosoft.SPOT.Hardware;
usingYFSoft.IO;
namespaceUserDriverTest
{
public class Program
{
public static void Main()
{
Debug.Print("UserDriverTest ...");
LCD1602 lcd = new LCD1602();
lcd.Print(0, 0, "Hello .NET MF!!!");
lcd.Print(0, 1, "YFSoft 20120920");
while (true)
{
System.Threading.Thread.Sleep(500);
}
}
}
//Width = 16 Height = 2
public class LCD1602
{
GeneralStream gs = null;
public LCD1602()
{
gs = new GeneralStream();
int ret =0;
if ((ret = gs.Open("UserDriver", "RS=PC08,RW=PC09,E=PB06,D4=PB07,D5=PC00,D6=PC02,D7=PC03"))<= 0)
{
Debug.Print("ERR="+ ret.ToString());
gs = null;
}
}
public void Print(byte x, byte y, string s)
{
if (gs == null)return;
byte[] temp = System.Text.UTF8Encoding.UTF8.GetBytes(s);
byte[] buff = newbyte[temp.Length + 1];
Array.Copy(temp, buff, temp.Length);
buff[buff.Length - 1] = 0;
gs.Write(buff, x << 8 | y, temp.Length);
}
}
}
代码执行后,其运行效果如下图所示:

-------------------------------------------------------------------------------------------------
MF简介:http://blog.csdn.net/yefanqiu/article/details/5711770
MF资料:http://www.sky-walker.com.cn/News.asp?Id=25