BP神经网络——从二次代价函数(Quadratic cost)到交叉熵(cross-entropy cost)代价函数
通过下文的阐述我们可以获得以下信息:
反向传播(back propagation)算法是一个计算框架(或者计算流程)
既然是一个计算框架,便与代价函数的具体形式(无论是二次代价还是交叉熵代价函数,只要能将预测的误差映射为一个标量,当然这一映射要满足特定的物理意义)无关。正因为如此,我们可将任何满足特定条件的代价函数
embedded反向传播的计算过程。不同代价函数在计算上的不同
不同代价函数的不同就在于step 2,计算单样本的预测误差对最后一层各神经元的输入( z )的微分(导数)形式不同,也即 δL 不同。
我们首先来回顾BP神经网络反向传播过程:
step 1:前向计算各层各个神经元的输入与输出,并记录之
根据权重和偏置的初始化值前向计算(feedforward)各个layer的各个neuron的输入(又叫得分,score,对应于 z )与输出(又叫激活值,activation,简记为 a ),下面给出向量的形式:
step 2:反向传播的起点,计算最后一层的 δL
首先在当前网络状态( (w,b) 给定)下,根据feedforward( a=σ(w⋅a+b) ),预测当前样本 x 的label值,再根据代价函数(此时不指定具体形式, C=(a,y) , a=σ(z) , a 是activation激活值的缩写),计算对于神经网络的最后一层,代价函数关于最后一层的输入 z 的导数:
L 表示整个神经网络拓扑结构的层数,在代价函数为二次代价(Quadratic cost)的情况下:
代价函数为交叉熵(cross-entropy)的情形:
因为 σ(z)=11+exp−z ,经过简单求导其关于 z 的微分为: σ′(z)=σ(z)(1−σ(z)) ,进一步可将上式化简为:
对比两种代价函数下的 δL ,我们发现 σ′(zL) 这一项神奇地消失了,有没有什么特殊的意义呢?
我们来观察 σ(z)=11+exp(−z) 这一著名的sigmoid型函数:
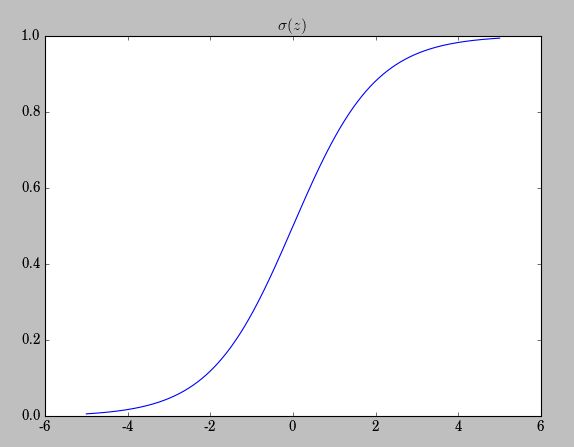
我们看到在 σ(z) 逼近0或者1时,变化率( σ′(z) )越来越小,呈现一种饱和状态( saturation),当 σ′(z) 变化率减慢,也就意味着 δL 变化率减慢,也就意味着学习率在下降(当然是在同等 learningrate:η 的前提下)。
所以,将代价函数换成交叉熵,便避免了因 σ′(z) 饱和而带来的学习率的下降的情况,当然这种替换仅对sigmoid型的激励函数有效。
step 3:反向传播,更新各层之间的权重与偏置
这里需要注意的是向量 δℓ、xℓ−1 以及权值更新矩阵 ∂C∂wℓ 的size的问题, (∂C∂wℓ)j×i=(δℓ)j×1×(xℓ−1)1×i ,编程时要特别注意。
反向传播算法的核心公式即是:
这里矩阵和向量的
size分别为:
(δℓ)j=((wℓ+1)Tk×j×(δℓ+1)k×1)j⊙σ′(zℓ)j×1 。
⊙ 表示同
size的矩阵或者向量进行按位相乘,计算十分简单,对应于
matlab中的
.*,
numpy.ndarray的
*,注意两种语言的差异。
而我们在step 2,已经计算过最末一层的 δL ,由此从后向前便可计算各层的权值与偏置。
难能可贵的一点是:我们在步骤3并未看到任何与代价函数有关的记号,它已全部隐式的embedded在 δℓ 中了。
下面给出先关的代码:
def sigmoid(z):
return 1./(1.+np.exp(-z))
def sigmoid_prime(z):
return sigmoid(z)*(1-sigmoid(z))
class QuadraticCost(object):
@staticmethod
def fn(a, y):
return 1/2*np.linalg.norm(a-y)**2
@staicmethod
def delta(z, a, y):
return (a-y)*sigmid_prime(z)
class CrossEntroyCost(object):
@staticmethod
def fn(a, y):
# 为了数值稳定性,有可能出现(y=1,a=1)的情况,0*log(0)=nan
# nan+任何值=nan,nan破坏最后的内积运算
return -(np.dot(y.transpose(), np.nan_to_num(np.log(a)))+
np.dot((1-y).transpose(), np.nan_to_num(np.log(1-a))))
@staticmethod
def delta(z, a, y): # 保持接口一致
return a-y
# 作为Network类的成员函数出现:
def backprog(self, x, y):
nabla_b = [np.zeros(b.shape) for b in self.biases]
nabla_w = [np.zeros(w.shape) for w in self.weights]
activation = x
activations = [x]
zs = []
# step 1
for w, b in zip(self.weights, self.biases):
z = np.dot(w, activation) + b
zs.append(z)
activation = sigmoid(z)
activations.append(activation)
# step 2
# self.cost 作为构造时的一个参数,默认为CrossEntropyCost
# 这里再次体现了我在本文开始说的,不同代价函数唯一的不同在于计算最后一层的$\delta^\ell$
delta = (self.cost).delta(zs[-1], activations[-1], y)
nabla_b[-1] = delta
nabla_w[-1] = np.dot(delta, activations[-2].transpose())
# step 3
for l in range(2, self.num_layers):
z = zs[-l]
sp = sigmoid_prime(z)
delta = np.dot(self.weights[-l+1].transpose(), delta)*sp
nabla_b[-l] = delta
nabla_w[-l] = np.dot(delta, activations[-l-1].transpose()]
return nabla_b, nabla_w