DS18B20 驱动编写
对驱动工程师而言,时序分析的意思是让芯片之间的访问满足芯片手册中时序图信号的有效的先后顺序、采样建立时间、保持时间的要求,通过时序来达到数据传输和硬件控制的目的。
嵌入式开发平台:mini2440
DS18B20 所用GPIO:S3C2410_GPF(3)
一、DS18B20 时序分析
DS18B20的一线工作协议流程是:初始化→ROM操作指令→存储器操作指令→数据传输,其工作时序包括:初始化时序、写时序、读时序。
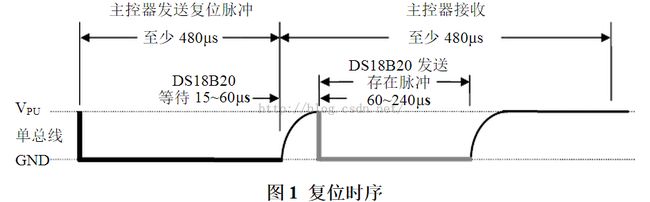
1、初始化时序
主机首先发出一个480-960微秒的低电平脉冲,然后释放总线变为高电平,并在随后的480微秒时间内对总线进行检测,如果有低电平出现说明总线上有器件已做出应答,若无低电平出现一直都是高电平说明总线上无器件应答。
作为从器件的DS18B20在一上电后就一直在检测总线上是否有480-960微秒的低电平出现,如果有,在总线转为高电平后等待15-60微秒后将总线电平拉低60-240微秒做出响应存在脉冲,告诉主机本器件已做好准备,若没有检测到就一直在检测等待。
static int ds18b20_init(void)
{
int retval = 0;
s3c2410_gpio_cfgpin(DQ, CFG_OUT);
s3c2410_gpio_pullup(DQ, 0);
s3c2410_gpio_setpin(DQ, 1);
udelay(2);
s3c2410_gpio_setpin(DQ, 0); // 拉低ds18b20总线,复位ds18b20
udelay(500); // 保持复位电平500us
s3c2410_gpio_setpin(DQ, 1); // 释放ds18b20总线
udelay(60);
// 若复位成功,ds18b20发出存在脉冲(低电平,持续60~240us)
s3c2410_gpio_cfgpin(DQ, CFG_IN);
retval = s3c2410_gpio_getpin(DQ);
udelay(500);
s3c2410_gpio_cfgpin(DQ, CFG_OUT);
s3c2410_gpio_pullup(DQ, 0);
s3c2410_gpio_setpin(DQ, 1); // 释放总线
return retval;
}
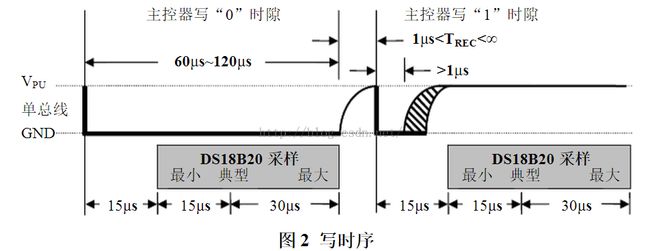
2、写时序
写周期最少为60微秒,最长不超过120微秒,写周期一开始作为主机先把总线拉低1微秒表示写周期开始,随后若主机想写0,则继续拉低电平最少60微秒直至写周期结束,然后释放总线为高电平;若主机想写1,在一开始拉低总线电平1微秒后就释放总线为高电平,一直到写周期结束。
而作为从机的DS18B20则在检测到总线被拉低后等待15微秒然后从15μs到45μs开始对总线采样,在采样期内总线为高电平则为1,若采样期内总线为低电平则为0。
static void write_byte(unsigned char data)
{
int i = 0;
s3c2410_gpio_cfgpin(DQ, CFG_OUT);
s3c2410_gpio_pullup(DQ, 1);
for (i = 0; i < 8; i++)
{
// 总线从高拉至低电平时,就产生写时隙
s3c2410_gpio_setpin(DQ, 1);
udelay(2);
s3c2410_gpio_setpin(DQ, 0);
s3c2410_gpio_setpin(DQ, data & 0x01);
udelay(60);
data >>= 1;
}
s3c2410_gpio_setpin(DQ, 1); // 重新释放ds18b20总线
}
3、读时序
对于读数据操作时序也分为读0时序和读1时序两个过程,读时序是从主机把单总线拉低之后,在1微秒之后就得释放单总线为高电平,以让DS18B20把数据传输到单总线上。DS18B20在检测到总线被拉低1微秒后,便开始送出数据,若是要送出0就把总线拉为低电平直到读周期结束;若要送出1则释放总线为高电平。
主机在一开始拉低总线1微秒后释放总线,然后在包括前面的拉低总线电平1微秒在内的15微秒时间内完成对总线进行采样检测,采样期内总线为低电平则确认为0,采样期内总线为高电平则确认为1,完成一个读时序过程,至少需要60μs才能完成。

static unsigned char read_byte(void)
{
int i;
unsigned char data = 0;
// 总线从高拉至低,只需维持低电平17ts,再把总线拉高,就产生读时隙
s3c2410_gpio_cfgpin(DQ, CFG_OUT);
s3c2410_gpio_pullup(DQ, 0);
for (i = 0; i < 8; i++)
{
s3c2410_gpio_setpin(DQ, 1);
udelay(2);
s3c2410_gpio_setpin(DQ, 0);
udelay(2);
s3c2410_gpio_setpin(DQ, 1);
udelay(8);
data >>= 1;
s3c2410_gpio_cfgpin(DQ, CFG_IN);
if (s3c2410_gpio_getpin(DQ))
data |= 0x80;
udelay(50);
}
s3c2410_gpio_cfgpin(DQ, CFG_OUT);
s3c2410_gpio_pullup(DQ, 0);
s3c2410_gpio_setpin(DQ, 1); // 释放ds18b20总线
return data;
}
二、操作方法
DS18B20单线通信功能是分时完成的,有严格的时序概念,如果出现序列混乱,1-WIRE器件将不影响主机,因此读写时序很重要。系统对DS18B20的各种操作必须按协议进行,根据DS18B20的协议规定,微控制器控制DS18B20完成温度的转换必须经过以下4个步骤:
1)每次读写前对DS18B20进行复位初始化。复位要求主CPU将数据线下拉500μs,然后释放,DS18B20收到信号后等待16μs-60μs左右,然后发出60μs-240μs的存在低脉冲,主CPU收到此信号后表示复位成功。
2)发送一条ROM指令

3)发送存储器指令
1、让DS18B20进行一次温度转换的具体操作如下:
a -- 主机先做个复位操作;
b -- 主机再写跳过ROM的操作(CCH)命令;
c -- 然后主机接着写转换温度的操作指令,后面释放总线至少1秒,让DS18B20完成转换操作。需要注意的是每个命令字节在写的时候都是低字节先写,例如CCH的二进制为11001100,在写到总线上时要从低位开始写,写的顺序是“0、0、1、1、0、0、1、1”,整个操作的总线状态如图所。
2、读取RAM的温度数据,同样,这个操作也要按照三个步骤:
a -- 主机发出复位操作并接受DS18B20的应答(存在)脉冲;
b -- 主机发出跳过对ROM操作的命令(CCH);
c -- 主机发出读取RAM的命令(BEH),随后主机依次读取DS18B20发出的从第0-第8,共九个字节的数据。如果只想读取温度数据,那在读完第0和第1个数据后就不再理会后面DS18B20发出的数据即可,同样读取数据也是低位在前,整个操作的总线状态如图所示。
三、具体驱动编写
1、ds18b20_drv.c
#include <linux/init.h>
#include <linux/module.h>
#include <linux/delay.h>
#include <linux/kernel.h>
#include <linux/moduleparam.h>
#include <linux/init.h>
#include <linux/types.h>
#include <linux/fs.h>
#include <mach/regs-gpio.h>
#include <mach/hardware.h>
#include <linux/cdev.h>
#include <asm/uaccess.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/device.h>
/* 相关引脚定义,方便以后移植 */
#define DQ S3C2410_GPF(3)
#define CFG_IN S3C2410_GPIO_INPUT
#define CFG_OUT S3C2410_GPIO_OUTPUT
// ds18b20主次设备号(动态分配)
static int ds18b20_major = 0;
static int ds18b20_minor = 0;
static int ds18b20_nr_devs = 1;
// 定义设备类型
static struct ds18b20_device
{
struct cdev cdev;
};
struct ds18b20_device *ds18b20_devp; /*设备结构体指针 */
static struct class *ds18b20_class;
static struct class_device *ds18b20_class_dev;
/* 函数声明 */
static int ds18b20_open(struct inode *inode, struct file *filp);
static int ds18b20_init(void);
static void write_byte(unsigned char data);
static unsigned char read_byte(void);
static ssize_t ds18b20_read(struct file *filp, char __user * buf, size_t count, loff_t * f_pos);
void ds18b20_setup_cdev(struct ds18b20_device *dev, int index);
static int ds18b20_open(struct inode *inode, struct file *filp)
{
int flag = 0;
flag = ds18b20_init();
if (flag & 0x01)
{
printk(KERN_WARNING "open ds18b20 failed\n");
return -1;
}
printk(KERN_NOTICE "open ds18b20 successful\n");
return 0;
}
static int ds18b20_init(void)
{
int retval = 0;
s3c2410_gpio_cfgpin(DQ, CFG_OUT);
s3c2410_gpio_pullup(DQ, 0);
s3c2410_gpio_setpin(DQ, 1);
udelay(2);
s3c2410_gpio_setpin(DQ, 0); // 拉低ds18b20总线,复位ds18b20
udelay(500); // 保持复位电平500us
s3c2410_gpio_setpin(DQ, 1); // 释放ds18b20总线
udelay(60);
// 若复位成功,ds18b20发出存在脉冲(低电平,持续60~240us)
s3c2410_gpio_cfgpin(DQ, CFG_IN);
retval = s3c2410_gpio_getpin(DQ);
udelay(500);
s3c2410_gpio_cfgpin(DQ, CFG_OUT);
s3c2410_gpio_pullup(DQ, 0);
s3c2410_gpio_setpin(DQ, 1); // 释放总线
return retval;
}
static void write_byte(unsigned char data)
{
int i = 0;
s3c2410_gpio_cfgpin(DQ, CFG_OUT);
s3c2410_gpio_pullup(DQ, 1);
for (i = 0; i < 8; i++)
{
// 总线从高拉至低电平时,就产生写时隙
s3c2410_gpio_setpin(DQ, 1);
udelay(2);
s3c2410_gpio_setpin(DQ, 0);
s3c2410_gpio_setpin(DQ, data & 0x01);
udelay(60);
data >>= 1;
}
s3c2410_gpio_setpin(DQ, 1); // 重新释放ds18b20总线
}
static unsigned char read_byte(void)
{
int i;
unsigned char data = 0;
for (i = 0; i < 8; i++)
{
// 总线从高拉至低,只需维持低电平17ts,再把总线拉高,就产生读时隙
s3c2410_gpio_cfgpin(DQ, CFG_OUT);
s3c2410_gpio_pullup(DQ, 0);
s3c2410_gpio_setpin(DQ, 1);
udelay(2);
s3c2410_gpio_setpin(DQ, 0);
udelay(2);
s3c2410_gpio_setpin(DQ, 1);
udelay(8);
data >>= 1;
s3c2410_gpio_cfgpin(DQ, CFG_IN);
if (s3c2410_gpio_getpin(DQ))
data |= 0x80;
udelay(50);
}
s3c2410_gpio_cfgpin(DQ, CFG_OUT);
s3c2410_gpio_pullup(DQ, 0);
s3c2410_gpio_setpin(DQ, 1); // 释放ds18b20总线
return data;
}
static ssize_t ds18b20_read(struct file *filp, char __user * buf, size_t count, loff_t * f_pos)
{
int flag;
unsigned long err;
unsigned char result[2] = { 0x00, 0x00 };
//struct ds18b20_device *dev = filp->private_data;
flag = ds18b20_init();
if (flag & 0x01)
{
printk(KERN_WARNING "ds18b20 init failed\n");
return -1;
}
write_byte(0xcc);
write_byte(0x44);
flag = ds18b20_init();
if (flag & 0x01)
return -1;
write_byte(0xcc);
write_byte(0xbe);
result[0] = read_byte(); // 温度低八位
result[1] = read_byte(); // 温度高八位
err = copy_to_user(buf, &result, sizeof(result));
return err ? -EFAULT : min(sizeof(result), count);
}
static struct file_operations ds18b20_dev_fops = {
.owner = THIS_MODULE,
.open = ds18b20_open,
.read = ds18b20_read,
};
void ds18b20_setup_cdev(struct ds18b20_device *dev, int index)
{
int err, devno = MKDEV(ds18b20_major, ds18b20_minor + index);
cdev_init(&dev->cdev, &ds18b20_dev_fops);
dev->cdev.owner = THIS_MODULE;
err = cdev_add(&(dev->cdev), devno, 1);
if (err)
{
printk(KERN_NOTICE "ERROR %d add ds18b20\n", err);
}
}
static int __init ds18b20_dev_init(void)
{
int result;
dev_t dev = 0;
dev = MKDEV(ds18b20_major, ds18b20_minor);
if (ds18b20_major)
{
result = register_chrdev_region(dev, ds18b20_nr_devs, "ds18b20");
}
else
{
result = alloc_chrdev_region(&dev, ds18b20_minor, ds18b20_nr_devs, "ds18b20");
ds18b20_major = MAJOR(dev);
}
if (result < 0)
{
printk(KERN_WARNING "ds18b20: failed to get major\n");
return result;
}
/* 为新设备分配内存和初始化 */
ds18b20_devp = kmalloc(sizeof(struct ds18b20_device), GFP_KERNEL);
if (!ds18b20_devp)
{ /*申请失败 */
result = -ENOMEM;
goto fail_malloc;
}
memset(ds18b20_devp, 0, sizeof(struct ds18b20_device));
ds18b20_setup_cdev(ds18b20_devp, 0);
/* 自动创建设备节点 */
ds18b20_class = class_create(THIS_MODULE, "ds18b20_sys_class");
if (IS_ERR(ds18b20_class))
return PTR_ERR(ds18b20_class);
ds18b20_class_dev =
device_create(ds18b20_class, NULL, MKDEV(ds18b20_major, 0), NULL, "ds18b20");
if (unlikely(IS_ERR(ds18b20_class_dev)))
return PTR_ERR(ds18b20_class_dev);
return 0;
fail_malloc:
unregister_chrdev_region(dev, 1);
return result;
}
static void __exit ds18b20_dev_exit(void)
{
cdev_del(&ds18b20_devp->cdev); /*注销cdev */
kfree(ds18b20_devp); /*释放设备结构体内存 */
unregister_chrdev_region(MKDEV(ds18b20_major, 0), ds18b20_nr_devs); /*释放设备号 */
device_unregister(ds18b20_class_dev);
class_destroy(ds18b20_class);
}
module_init(ds18b20_dev_init);
module_exit(ds18b20_dev_exit);
MODULE_LICENSE("Dual BSD/GPL");
2、app-ds18b20.c
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <linux/ioctl.h>
// 函数声明
void ds18b20_delay(int i);
int main()
{
int fd, i;
unsigned char result[2]; // 从ds18b20读出的结果,result[0]存放低八位
unsigned char integer_value = 0;
float decimal_value = 0; // 温度数值,decimal_value为小数部分的值
float temperature = 0;
fd = open("/dev/ds18b20", 0);
if (fd < 0)
{
perror("open device failed\n");
exit(1);
}
while (1)
{
i++;
read(fd, &result, sizeof(result));
integer_value = ((result[0] & 0xf0) >> 4) | ((result[1] & 0x07) << 4);
// 精确到0.25度
decimal_value = 0.5 * ((result[0] & 0x0f) >> 3) + 0.25 * ((result[0] & 0x07) >> 2);
temperature = (float)integer_value + decimal_value;
printf("Current Temperature:%6.2f\n", temperature);
ds18b20_delay(500);
}
}
void ds18b20_delay(int i)
{
int j, k;
for (j = 0; j < i; j++)
for (k = 0; k < 50000; k++) ;
}
测试结果:
[[email protected] home]# [[email protected] home]#./app-ds18b20 open ds18b20 successful Current Temperature: 23.50 Current Temperature: 23.50 Current Temperature: 23.25 Current Temperature: 23.50 Current Temperature: 23.50 Current Temperature: 23.50 ^C [[email protected] home]#