Linux 字符设备驱动开发基础(一)—— 编写简单 LED 设备驱动
现在,我们来编写自己第一个字符设备驱动 —— 点亮LED。(不完善,后面再完善)
硬件平台:Exynos4412(FS4412)
编写驱动分下面几步:
a -- 查看原理图、数据手册,了解设备的操作方法;
b -- 在内核中找到相近的驱动程序,以它为模板进行开发,有时候需要从零开始;
c -- 实现驱动程序的初始化:比如向内核注册这个驱动程序,这样应用程序传入文件名,内核才能找到相应的驱动程序;
d -- 设计所要实现的操作,比如 open、close、read、write 等函数;
e -- 实现中断服务(中断不是每个设备驱动所必须的);
f -- 编译该驱动程序到内核中,或者用 insmod 命令加载;
g-- 测试驱动程序;
下面是一个点亮LED 的驱动:
第一步,当然是查看手册,查看原理图,找到相应寄存器;
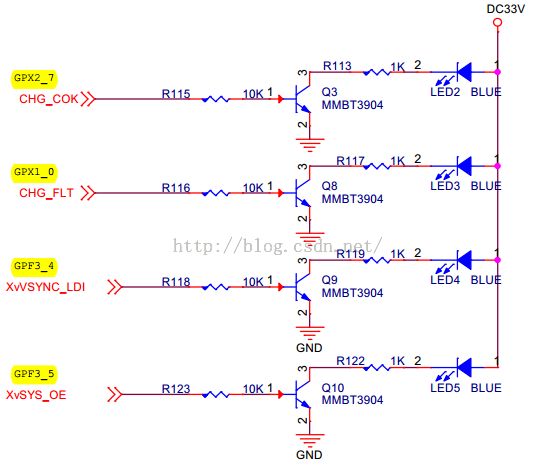
查看手册,四个LED 所用寄存器为:
led2
GPX2CON 0x11000c40
GPX2DAT 0x11000c44
led3
GPX1CON 0x11000c20
GPX1DAT 0x11000c24
led4 3-4 3-5
GPF3CON 0x114001e0
GPF3DAT 0x114001e4
这里要注意:arm体系架构是io内存,必须要映射 ioremap( ); 其作用是物理内存向虚拟内存的映射。 用到 writel readl这两个函数,详细解释会在后面不上,先看一下简单用法:
以LED2为例,下面是地址映射及读写:
int *pgpx2con ; int *pgpx2dat; pgpx2con = ioremap( GPX2CON, 4); pgpx2dat = ioremap(GPX2DAT,4); readl(pgpx2con); writel(0x01, pgpx2dat );
下面是驱动程序,后面会更完善
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <asm/io.h>
#include <asm/uaccess.h>
static int major = 250;
static int minor=0;
static dev_t devno;
static struct class *cls;
static struct device *test_device;
#define GPX2CON 0x11000c40
#define GPX2DAT 0x11000c44
#define GPX1CON 0x11000c20
#define GPX1DAT 0x11000c24
#define GPF3CON 0x114001e0
#define GPF3DAT 0x114001e4
static int *pgpx2con ;
static int *pgpx2dat;
static int *pgpx1con ;
static int *pgpx1dat;
static int *pgpf3con ;
static int *pgpf3dat;
void fs4412_led_off(int num);
void fs4412_led_on(int num)
{
switch(num)
{
case 1:
writel(readl(pgpx2dat) |(0x1<<7), pgpx2dat);
break;
case 2:
writel(readl(pgpx1dat) |(0x1<<0), pgpx1dat);
break;
case 3:
writel(readl(pgpf3dat) |(0x1<<4), pgpf3dat);
break;
case 4:
writel(readl(pgpf3dat) |(0x1<<5), pgpf3dat);
break;
default:
fs4412_led_off(1);
fs4412_led_off(2);
fs4412_led_off(3);
fs4412_led_off(4);
break;
}
}
void fs4412_led_off(int num)
{
switch(num)
{
case 1:
writel(readl(pgpx2dat) &(~(0x1<<7)), pgpx2dat);
break;
case 2:
writel(readl(pgpx1dat)&(~(0x1<<0)), pgpx1dat);
break;
case 3:
writel(readl(pgpf3dat) &(~(0x1<<4)), pgpf3dat);
break;
case 4:
writel(readl(pgpf3dat) &(~(0x1<<5)), pgpf3dat);
break;
}
}
static int led_open (struct inode *inode, struct file *filep)
{//open
fs4412_led_off(1);
fs4412_led_off(2);
fs4412_led_off(3);
fs4412_led_off(4);
return 0;
}
static int led_release(struct inode *inode, struct file *filep)
{//close
fs4412_led_off(1);
fs4412_led_off(2);
fs4412_led_off(3);
fs4412_led_off(4);
return 0;
}
static ssize_t led_read(struct file *filep, char __user *buf, size_t len, loff_t *pos)
{
return 0;
}
static ssize_t led_write(struct file *filep, const char __user *buf, size_t len, loff_t *pos)
{
int led_num;
if(len !=4)
{
return -EINVAL;
}
if(copy_from_user(&led_num,buf,len))
{
return -EFAULT;
}
fs4412_led_on(led_num);
printk("led_num =%d \n",led_num);
return 0;
}
static struct file_operations hello_ops=
{
.open = led_open,
.release = led_release,
.read = led_read,
.write = led_write,
};
static void fs4412_led_init(void)
{
pgpx2con = ioremap(GPX2CON,4);
pgpx2dat = ioremap(GPX2DAT,4);
pgpx1con = ioremap(GPX1CON,4);
pgpx1dat =ioremap(GPX1DAT,4);
pgpf3con = ioremap(GPF3CON,4);
pgpf3dat =ioremap(GPF3DAT,4);
writel((readl(pgpx2con)& ~(0xf<<28)) |(0x1<<28),pgpx2con) ;
writel((readl(pgpx1con)& ~(0xf<<0)) |(0x1<<0),pgpx1con) ;
writel((readl(pgpf3con)& ~(0xff<<16)) |(0x11<<16),pgpf3con) ;
}
static int led_init(void)
{
int ret;
devno = MKDEV(major,minor);
ret = register_chrdev(major,"led",&hello_ops);
cls = class_create(THIS_MODULE, "myclass");
if(IS_ERR(cls))
{
unregister_chrdev(major,"led");
return -EBUSY;
}
test_device = device_create(cls,NULL,devno,NULL,"led");//mknod /dev/hello
if(IS_ERR(test_device))
{
class_destroy(cls);
unregister_chrdev(major,"led");
return -EBUSY;
}
fs4412_led_init();
return 0;
}
void fs4412_led_unmap(void)
{
iounmap(pgpx2con);
iounmap(pgpx2dat );
iounmap(pgpx1con);
iounmap(pgpx1dat );
iounmap(pgpf3con );
iounmap(pgpf3dat );
}
static void led_exit(void)
{
fs4412_led_unmap();
device_destroy(cls,devno);
class_destroy(cls);
unregister_chrdev(major,"led");
printk("led_exit \n");
}
MODULE_LICENSE("GPL");
module_init(led_init);
module_exit(led_exit);
测试程序:
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdio.h>
main()
{
int fd,i,lednum;
fd = open("/dev/led",O_RDWR);
if(fd<0)
{
perror("open fail \n");
return ;
}
for(i=0;i<100;i++)
{
lednum=0;
write(fd,&lednum,sizeof(int));
lednum = i%4+1;
write(fd,&lednum,sizeof(int));
sleep(1);
}
close(fd);
}
makefile:
ifneq ($(KERNELRELEASE),) obj-m:=hello.o $(info "2nd") else #KDIR := /lib/modules/$(shell uname -r)/build KDIR := /home/xiaoming/linux-3.14-fs4412 PWD:=$(shell pwd) all: $(info "1st") make -C $(KDIR) M=$(PWD) modules arm-none-linux-gnueabi-gcc test.c sudo cp hello.ko a.out /rootfs/test/ clean: rm -f *.ko *.o *.symvers *.mod.c *.mod.o *.order endif
编译结束后,将a.out 和 hello.ko 拷贝到开发板中:
# insmod hello.ko
#mknod /dev/hello c 250 0
#./a.out
会看到跑马灯效果。
后面会对该驱动完善。