s3c2440 tty驱动
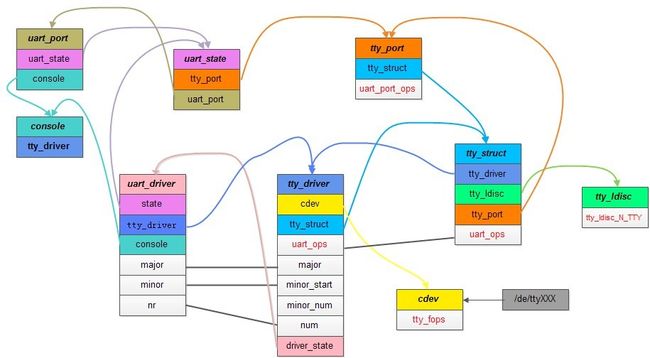
1、tty驱动的总体调用过程
2、底层串口的驱动
static struct uart_driver s3c24xx_uart_drv = {
.owner = THIS_MODULE,
.driver_name = "ttyS", /*Modified by guowenxue, 2011.08.30*/
.nr = CONFIG_SERIAL_SAMSUNG_UARTS,
.cons = S3C24XX_SERIAL_CONSOLE,
.dev_name = S3C24XX_SERIAL_NAME, /
.major = S3C24XX_SERIAL_MAJOR,
.minor = S3C24XX_SERIAL_MINOR,
};
3、底层串口的操作函数
static struct uart_ops s3c24xx_serial_ops = {
.pm = s3c24xx_serial_pm,
.tx_empty = s3c24xx_serial_tx_empty,
.get_mctrl = s3c24xx_serial_get_mctrl,
.set_mctrl = s3c24xx_serial_set_mctrl,
.stop_tx = s3c24xx_serial_stop_tx,
.start_tx = s3c24xx_serial_start_tx,
.stop_rx = s3c24xx_serial_stop_rx,
.enable_ms = s3c24xx_serial_enable_ms,
.break_ctl = s3c24xx_serial_break_ctl,
.startup = s3c24xx_serial_startup,
.shutdown = s3c24xx_serial_shutdown,
.set_termios = s3c24xx_serial_set_termios,
.type = s3c24xx_serial_type,
.release_port = s3c24xx_serial_release_port,
.request_port = s3c24xx_serial_request_port,
.config_port = s3c24xx_serial_config_port,
.verify_port = s3c24xx_serial_verify_port,
}
4、tty层串口操作函数
static const struct tty_operations uart_ops = {
.open = uart_open,
.close = uart_close,
.write = uart_write,
.put_char = uart_put_char,
.flush_chars = uart_flush_chars,
.write_room = uart_write_room,
.chars_in_buffer= uart_chars_in_buffer,
.flush_buffer = uart_flush_buffer,
.ioctl = uart_ioctl,
.throttle = uart_throttle,
.unthrottle = uart_unthrottle,
.send_xchar = uart_send_xchar,
.set_termios = uart_set_termios,
.set_ldisc = uart_set_ldisc,
.stop = uart_stop,
.start = uart_start,
.hangup = uart_hangup,
.break_ctl = uart_break_ctl,
.wait_until_sent= uart_wait_until_sent,
#ifdef CONFIG_PROC_FS
.proc_fops = &uart_proc_fops,
#endif
.tiocmget = uart_tiocmget,
.tiocmset = uart_tiocmset,
.get_icount = uart_get_icount,
#ifdef CONFIG_CONSOLE_POLL
.poll_init = uart_poll_init,
.poll_get_char = uart_poll_get_char,
.poll_put_char = uart_poll_put_char,
#endif
};
4、struct ktermios结构
- struct ktermios {
- tcflag_t c_iflag; /* input mode flags */ //输入模式标志
- tcflag_t c_oflag; /* output mode flags */ //输出模式标志
- tcflag_t c_cflag; /* control mode flags */ //控制模式标志
- tcflag_t c_lflag; /* local mode flags */ //本地模式标志
- cc_t c_line; /* line discipline */ //线路规程类型
- cc_t c_cc[NCCS]; /* control characters */ //控制字符
- speed_t c_ispeed; /* input speed */ //输入速度
- speed_t c_ospeed; /* output speed */ //输出速度
- };
5、tty层struct tty_driver
288 struct tty_driver {
289 int magic; /* magic number for this structure */
290 struct kref kref; /* Reference management */
291 struct cdev cdev; //含有cdev结构
292 struct module *owner;
293 const char *driver_name;
294 const char *name;
295 int name_base; /* offset of printed name */
296 int major; /* major device number */
297 int minor_start; /* start of minor device number */
298 int minor_num; /* number of *possible* devices */
299 int num; /* number of devices allocated */
300 short type; /* type of tty driver */
301 short subtype; /* subtype of tty driver */
302 struct ktermios init_termios; /* Initial termios */
303 int flags; /* tty driver flags */
304 struct proc_dir_entry *proc_entry; /* /proc fs entry */
305 struct tty_driver *other; /* only used for the PTY driver */
306
307 /*
308 * Pointer to the tty data structures
309 */
310 struct tty_struct **ttys;
311 struct ktermios **termios;
312 struct ktermios **termios_locked;
313 void *driver_state;
314
315 /*
316 * Driver methods
317 */
318
319 const struct tty_operations *ops; //指向tty层的函数
320 struct list_head tty_drivers; //驱动链表
321 };
6、struct tty_struct 结构
- struct tty_struct {
- int magic; //魔数
- struct kref kref; //参考计数
- struct device *dev; //设备文件
- struct tty_driver *driver; //tty驱动
- const struct tty_operations *ops; //tty操作函数集
- int index;
- struct mutex ldisc_mutex;
- struct tty_ldisc *ldisc; //线路规程
- struct mutex termios_mutex;
- spinlock_t ctrl_lock;
- struct ktermios *termios, *termios_locked;
- struct termiox *termiox;
- char name[64]; //名字
- struct pid *pgrp;
- struct pid *session;
- unsigned long flags;
- int count;
- struct winsize winsize;
- unsigned char stopped:1, hw_stopped:1, flow_stopped:1, packet:1;
- unsigned char low_latency:1, warned:1;
- unsigned char ctrl_status;
- unsigned int receive_room;
- struct tty_struct *link;
- struct fasync_struct *fasync;
- struct tty_bufhead buf;
- int alt_speed;
- wait_queue_head_t write_wait;
- wait_queue_head_t read_wait;
- struct work_struct hangup_work;
- void *disc_data;
- void *driver_data;
- struct list_head tty_files;
- #define N_TTY_BUF_SIZE 4096
- unsigned int column;
- unsigned char lnext:1, erasing:1, raw:1, real_raw:1, icanon:1;
- unsigned char closing:1;
- unsigned char echo_overrun:1;
- unsigned short minimum_to_wake;
- unsigned long overrun_time;
- int num_overrun;
- unsigned long process_char_map[256/(8*sizeof(unsigned long))];
- char *read_buf;
- int read_head;
- int read_tail;
- int read_cnt;
- unsigned long read_flags[N_TTY_BUF_SIZE/(8*sizeof(unsigned long))];
- unsigned char *echo_buf;
- unsigned int echo_pos;
- unsigned int echo_cnt;
- int canon_data;
- unsigned long canon_head;
- unsigned int canon_column;
- struct mutex atomic_read_lock;
- struct mutex atomic_write_lock;
- struct mutex output_lock;
- struct mutex echo_lock;
- unsigned char *write_buf;
- int write_cnt;
- spinlock_t read_lock;
- struct work_struct SAK_work;
- struct tty_port *port;
- };
7、struct file_operations 字符设备操作函数
static const struct file_operations tty_fops = {
.llseek = no_llseek,
.read = tty_read,
.write = tty_write,
.poll = tty_poll,
.unlocked_ioctl = tty_ioctl,
.compat_ioctl = tty_compat_ioctl,
.open = tty_open,
.release = tty_release,
.fasync = tty_fasync,
};
8、注册struct uart_drive底层串口驱动进tty层
int uart_register_driver(struct uart_driver *drv)
int uart_register_driver(struct uart_driver *drv)
{
struct tty_driver *normal;
int i, retval;
BUG_ON(drv->state); //用于内核调试
/*
* Maybe we should be using a slab cache for this, especially if
* we have a large number of ports to handle.
*/
drv->state = kzalloc(sizeof(struct uart_state) * drv->nr, GFP_KERNEL);
if (!drv->state)
goto out;
normal = alloc_tty_driver(drv->nr); //分配tty_driver结构体
if (!normal)
goto out_kfree;
drv->tty_driver = normal; //初始化 struct uart_driver的struct tty_driver指针
normal->owner = drv->owner;
normal->driver_name = drv->driver_name;
normal->name = drv->dev_name;
normal->major = drv->major;
normal->minor_start = drv->minor;
normal->type = TTY_DRIVER_TYPE_SERIAL;
normal->subtype = SERIAL_TYPE_NORMAL;
normal->init_termios = tty_std_termios; //初始化struct ktermios 结构
normal->init_termios.c_cflag = B9600 | CS8 | CREAD | HUPCL | CLOCAL;
normal->init_termios.c_ispeed = normal->init_termios.c_ospeed = 9600;
normal->flags = TTY_DRIVER_REAL_RAW | TTY_DRIVER_DYNAMIC_DEV;
normal->driver_state = drv; //保存 uart_driver结构信息
tty_set_operations(normal, &uart_ops); //tty层操作函数,struct tty_driver中含有
// 指向struct tty_operations的指针
/*
* Initialise the UART state(s).
*/
for (i = 0; i < drv->nr; i++) {
struct uart_state *state = drv->state + i;
struct tty_port *port = &state->port;
tty_port_init(port); //初始化tty_port
port->ops = &uart_port_ops;
port->close_delay = 500; /* .5 seconds */
port->closing_wait = 30000; /* 30 seconds */
tasklet_init(&state->tlet, uart_tasklet_action,
(unsigned long)state);
}
retval = tty_register_driver(normal); //注册struct tty_driver结构
if (retval >= 0)
return retval;
put_tty_driver(normal);
out_kfree:
kfree(drv->state);
out:
return -ENOMEM;
}
8、注册struct tty_driver结构
int tty_register_driver(struct tty_driver *driver)
{
int error;
int i;
dev_t dev;
void **p = NULL;
struct device *d;
if (!(driver->flags & TTY_DRIVER_DEVPTS_MEM) && driver->num) {
p = kzalloc(driver->num * 2 * sizeof(void *), GFP_KERNEL);
if (!p)
return -ENOMEM;
}
if (!driver->major) {
error = alloc_chrdev_region(&dev, driver->minor_start,
driver->num, driver->name); //如果主设备号为0,采用动态分配方式
if (!error) {
driver->major = MAJOR(dev); //获得新的主设备号
driver->minor_start = MINOR(dev);//获得新的此设备号
}
} else { //这设备号不为0,生成新的设备号
dev = MKDEV(driver->major, driver->minor_start);
error = register_chrdev_region(dev, driver->num, driver->name);
}
if (error < 0) {
kfree(p);
return error;
}
if (p) {
driver->ttys = (struct tty_struct **)p;
driver->termios = (struct ktermios **)(p + driver->num);
} else {
driver->ttys = NULL;
driver->termios = NULL;
}
cdev_init(&driver->cdev, &tty_fops); //初始化始化cdev设备
driver->cdev.owner = driver->owner;
error = cdev_add(&driver->cdev, dev, driver->num);
if (error) {
unregister_chrdev_region(dev, driver->num);
driver->ttys = NULL;
driver->termios = NULL;
kfree(p);
return error;
}
mutex_lock(&tty_mutex);
list_add(&driver->tty_drivers, &tty_drivers);
mutex_unlock(&tty_mutex);
if (!(driver->flags & TTY_DRIVER_DYNAMIC_DEV)) {
for (i = 0; i < driver->num; i++) {
d = tty_register_device(driver, i, NULL); //注册设备
if (IS_ERR(d)) {
error = PTR_ERR(d);
goto err;
}
}
}
proc_tty_register_driver(driver);
driver->flags |= TTY_DRIVER_INSTALLED;
return 0;
err:
for (i--; i >= 0; i--)
tty_unregister_device(driver, i);
mutex_lock(&tty_mutex);
list_del(&driver->tty_drivers);
mutex_unlock(&tty_mutex);
unregister_chrdev_region(dev, driver->num);
driver->ttys = NULL;
driver->termios = NULL;
kfree(p);
return error;
}
struct device *tty_register_device(struct tty_driver *driver, unsigned index,
struct device *device)
{
char name[64];
dev_t dev = MKDEV(driver->major, driver->minor_start) + index;
if (index >= driver->num) {
printk(KERN_ERR "Attempt to register invalid tty line number "
" (%d).\n", index);
return ERR_PTR(-EINVAL);
}
if (driver->type == TTY_DRIVER_TYPE_PTY)
pty_line_name(driver, index, name);
else
tty_line_name(driver, index, name);
return device_create(tty_class, device, dev, NULL, name);
}