can总线驱动的编写
一.系统硬件结构介绍
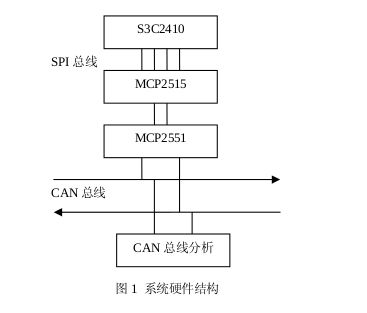
系统中 CAN 总线主要用来完成 S3C2410 开发板和 CAN 总线分析仪的数据传输。在S3C2410 开发平台上,MCP2515 芯片用作 CAN 控制器,MCP2551 芯片用作 CAN 收发器,S3C2410 微处理器用作节点控制器。如下图1所示。
1.1 S3C2410 的 SPI 接口简介
SPI( Serial Peripheral Interface) 是一个同步串行外围接口,允许 MCU 与各种外围设备以串行方式进行通信。S3C2410 微处理器包括两路 SPI,每一路分别有两个 8 位转移寄存器,用来发送和接收数据。在 SPI 进行传输时,数据同时发送和接收。如果只想发送数据,接收到的数据将是无效的;如果只想接收数据,应当发送全是 1 的数据。
1.2 MCP2551 功能简介
MCP2551 是 CAN 协议控制器和物理总线之间的接口。这个器件向总线提供了差动的发送能力,向 CAN 控制器提供了差动的接收能力。
1.3 MCP2515 功能简介
MCP2515是一款独立CAN控制器,是为简化连接CAN总线的应用而开发的。图2 简要显示了MCP2515的结构框图[3]。该器件主要由三个部分组成:

(1)CAN 协议引擎(处理所有总线上的报文发送和接收) ;
(2)用来为器件及其运行进行配置的控制逻辑和SRAM寄存器;
(3 )SPI协议模块,用来实现SPI通信模式。
二. 驱动程序设计
驱动源码:
/*
* Microchip MCP2515 CAN controller driver.
*
* Copyright (C) 2007 Embedall Technology Co., Ltd.
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation; either version 2 of the License, or
* (at your option) any later version.
*/
#include <linux/types.h>
#include <linux/init.h>
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/version.h>
#include <linux/device.h>
#include <linux/netdevice.h>
#include <linux/cdev.h>
#include <linux/interrupt.h>
#include <linux/list.h>
#include <linux/ioctl.h>
#include <linux/fs.h>
#include <linux/workqueue.h>
#include <linux/spi/spi.h>
#include <linux/can/can.h>
#include <linux/delay.h>
#include <linux/can/mcp251x.h>
#include <linux/semaphore.h>
#include <asm/gpio.h>
/* SPI interface instruction set */
#define INSTRUCTION_WRITE 0x02
#define INSTRUCTION_READ 0x03
#define INSTRUCTION_BIT_MODIFY 0x05
#define INSTRUCTION_LOAD_TXB(n) (0x40 + 2 * (n))
#define INSTRUCTION_READ_RXB(n) (0x90 + 4 * (n))
#define INSTRUCTION_RESET 0xc0
#define INSTRUCTION_RTS(n) (0x80 + (1<<n))
#define INSTRUCTION_RX_STATE 0xb0
# define RX_STATE_RTR 0x04
# define RX_STATE_IDE 0x08
#define INSTRUCTION_CAN_STATE 0xa0
# define CAN_STATE_TX2IF 0x01
# define CAN_STATE_TX2REQ 0x02
# define CAN_STATE_TX1IF 0x04
# define CAN_STATE_TX1REQ 0x08
# define CAN_STATE_TX0IF 0x10
# define CAN_STATE_TX0REQ 0x20
# define CAN_STATE_RX1IF 0x40
# define CAN_STATE_RX0IF 0x80
/* MPC251x registers */
#define CANSTAT 0x0e
#define CANCTRL 0x0f
# define CANCTRL_REQOP_MASK 0xe0
# define CANCTRL_REQOP_CONF 0x80
# define CANCTRL_REQOP_LISTEN_ONLY 0x60
# define CANCTRL_REQOP_LOOPBACK 0x40
# define CANCTRL_REQOP_SLEEP 0x20
# define CANCTRL_REQOP_NORMAL 0x00
# define CANCTRL_OSM 0x08
# define CANCTRL_ABAT 0x10
#define TEC 0x1c
#define REC 0x1d
#define CNF1 0x2a
#define CNF2 0x29
# define CNF2_BTLMODE 0x80
#define CNF3 0x28
# define CNF3_SOF 0x08
# define CNF3_WAKFIL 0x04
# define CNF3_PHSEG2_MASK 0x07
#define CANINTE 0x2b
# define CANINTE_MERRE 0x80
# define CANINTE_WAKIE 0x40
# define CANINTE_ERRIE 0x20
# define CANINTE_TX2IE 0x10
# define CANINTE_TX1IE 0x08
# define CANINTE_TX0IE 0x04
# define CANINTE_RX1IE 0x02
# define CANINTE_RX0IE 0x01
#define CANINTF 0x2c
# define CANINTF_MERRF 0x80
# define CANINTF_WAKIF 0x40
# define CANINTF_ERRIF 0x20
# define CANINTF_TX2IF 0x10
# define CANINTF_TX1IF 0x08
# define CANINTF_TX0IF 0x04
# define CANINTF_RX1IF 0x02
# define CANINTF_RX0IF 0x01
#define EFLG 0x2d
# define EFLG_RX1OVR 0x80
# define EFLG_RX0OVR 0x40
#define TXBCTRL(n) ((n * 0x10) + 0x30)
# define TXBCTRL_TXREQ 0x08
# define TXBCTRL_TXPRI(n) (n)
# define TXBCTRL_TXERR (1 << 4)
# define TXBCTRL_MLOA (1 << 5)
# define TXBCTRL_ABTF (1 << 6)
#define RXBCTRL(n) ((n * 0x10) + 0x60)
# define RXBCTRL_MASK 0x60
# define RXBCTRL_RXRTR 0x08
# define RXBCTRL_BULK (1 << 2)
# define RXBCTRL_RXM_MACH_ALL (0 << 6)
# define RXBCTRL_RXM_MACH_STD (1 << 6)
# define RXBCTRL_RXM_MACH_EXT (2 << 6)
# define RXBCTRL_TXM_MACH_OFF (3 << 6)
# define RXBCTRL_FILHIT_MASK 0x07
#define RXM_BASE(n) (0x20 + (n * 4))
#define RXF_BASE(n) ((n>2)?(0x10 + (n-3)*4):(0x00 + (n*4)))
#define SJW1 0x00
#define SJW2 0x40
#define SJW3 0x80
#define SJW4 0xC0
#define BTLMODE_CNF3 0x80
#define SEG1 0x00
#define SEG2 0x01
#define SEG3 0x02
#define SEG4 0x03
#define SEG5 0x04
#define SEG6 0x05
#define SEG7 0x06
#define SEG8 0x07
#define BRP1 0x00
#define BRP2 0x01
#define BRP3 0x02
#define BRP4 0x03
#define BRP5 0x04
#define BRP6 0x05
#define BRP7 0x06
#define BRP8 0x07
//#define CAN_FOSC_12MHZ
#define CAN_FOSC_16MHZ
#if defined(CAN_FOSC_12MHZ)
#define CAN_CNF1_10K (SJW3 | 0x1d)
#define CAN_CNF2_10K (BTLMODE_CNF3|(SEG6<<3)|SEG7)
#define CAN_CNF3_10K (SEG6)
#define CAN_CNF1_20K (SJW2 | 0x0E)
#define CAN_CNF2_20K (BTLMODE_CNF3|(SEG6<<3)|SEG7)
#define CAN_CNF3_20K (SEG6)
#define CAN_CNF1_50K (SJW1 | 0x05)
#define CAN_CNF2_50K (BTLMODE_CNF3|(SEG6<<3)|SEG7)
#define CAN_CNF3_50K (SEG6)
#define CAN_CNF1_100K (SJW1 | BRP3)
#define CAN_CNF2_100K (BTLMODE_CNF3|(SEG6<<3)|SEG7)
#define CAN_CNF3_100K (SEG6)
#define CAN_CNF1_125K (SJW1 | BRP3)
#define CAN_CNF2_125K (BTLMODE_CNF3|(SEG4<<3)|SEG7)
#define CAN_CNF3_125K (SEG4)
#define CAN_CNF1_250K (SJW1 | BRP2)
#define CAN_CNF2_250K (BTLMODE_CNF3|(SEG3<<3)|SEG5)
#define CAN_CNF3_250K (SEG3)
#define CAN_CNF1_500K (SJW1 | BRP1)
#define CAN_CNF2_500K (BTLMODE_CNF3|(SEG3<<3)|SEG5)
#define CAN_CNF3_500K (SEG3)
#define CAN_CNF1_750K (SJW1 | BRP1)
#define CAN_CNF2_750K (BTLMODE_CNF3|(SEG3<<2)|SEG1)
#define CAN_CNF3_750K (SEG3)
#define CAN_CNF1_1000K (SJW1 | BRP1)
#define CAN_CNF2_1000K (BTLMODE_CNF3|(SEG2<<3)|SEG1)
#define CAN_CNF3_1000K (SEG2)
#elif defined(CAN_FOSC_16MHZ)
#define CAN_CNF1_10K (SJW1 | 0x31)
#define CAN_CNF2_10K (BTLMODE_CNF3|(SEG4<<3)|SEG7)
#define CAN_CNF3_10K (SEG4)
#define CAN_CNF1_20K (SJW1 | 0x18)
#define CAN_CNF2_20K (BTLMODE_CNF3|(SEG4<<3)|SEG7)
#define CAN_CNF3_20K (SEG4)
#define CAN_CNF1_50K (SJW1 | 0x09)
#define CAN_CNF2_50K (BTLMODE_CNF3|(SEG4<<3)|SEG7)
#define CAN_CNF3_50K (SEG4)
#define CAN_CNF1_100K (SJW1 | BRP5)
#define CAN_CNF2_100K (BTLMODE_CNF3|(SEG4<<3)|SEG7)
#define CAN_CNF3_100K (SEG4)
#define CAN_CNF1_125K (SJW1 | BRP4)
#define CAN_CNF2_125K (BTLMODE_CNF3|(SEG4<<3)|SEG7)
#define CAN_CNF3_125K (SEG4)
#define CAN_CNF1_250K (SJW1 | BRP2)
#define CAN_CNF2_250K (BTLMODE_CNF3|(SEG4<<3)|SEG7)
#define CAN_CNF3_250K (SEG4)
#define CAN_CNF1_500K (SJW1 | BRP1)
#define CAN_CNF2_500K (BTLMODE_CNF3|(SEG4<<3)|SEG7)
#define CAN_CNF3_500K (SEG4)
#define CAN_CNF1_750K (SJW1 | BRP1)
#define CAN_CNF2_750K (BTLMODE_CNF3|(SEG3<<3)|SEG4)
#define CAN_CNF3_750K (SEG3)
#define CAN_CNF1_800K (SJW1 | BRP1)
#define CAN_CNF2_800K (BTLMODE_CNF3|(SEG3<<3)|SEG3)
#define CAN_CNF3_800K (SEG3)
#define CAN_CNF1_1000K (SJW1 | BRP1)
#define CAN_CNF2_1000K (BTLMODE_CNF3|(SEG2<<3)|SEG3)
#define CAN_CNF3_1000K (SEG2)
#endif /* end define CAN_FOSC_12MHZ */
/* Buffer size required for the largest SPI transfer (i.e., reading a frame).
*/
#define SPI_TRANSFER_BUF_LEN (2*(6 + CAN_FRAME_MAX_DATA_LEN))
/* Buffer size required for ring buffer of receive and send */
#define MCP251X_BUF_LEN 8
#define CAN_DEV_MAX 8
#define DRIVER_NAME "mcp2515"
static dev_t can_devt;
static int can_minor = 0;
static struct class *can_class;
static int write_udelay=1024;
struct mcp251x {
struct cdev cdev;
//struct class_device *class_dev;
struct device *class_dev;
struct semaphore lock; /* semaphore for spi bus share. */
struct semaphore rxblock; /* semaphore for ring buffer of receive. */
struct semaphore txblock; /* semaphore for ring buffer of send. */
uint8_t *spi_transfer_buf; /* temp buffer for spi bus transfer. */
struct can_frame rxb[MCP251X_BUF_LEN]; /* ring buffer for receive. */
struct can_frame txb[MCP251X_BUF_LEN]; /* ring buffer for send. */
int txbin; /* pos of in for ring buffer of send. */
int txbout; /* pos of out for ring buffer of send. */
int rxbin; /* pos of in for ring buffer of receive. */
int rxbout; /* pos of out for ring buffer of receive. */
int bit_rate; /* save bit rate of current set. */
int count; /* count of the device opened. */
wait_queue_head_t wq; /* queue for read process. */
struct work_struct irq_work; /* bottom half of interrupt task. */
struct spi_device *spi; /* save the point of struce spi_device. */
struct can_filter filter; /* save the filter data of current set. */
};
/* ........................................................................ */
#if 0
static void mcp251x_start_tx(struct spi_device *spi, uint8_t buf_idx)
{
struct mcp251x *chip = dev_get_drvdata(&spi->dev);
uint8_t *tx_buf;
int ret;
tx_buf = chip->spi_transfer_buf;
down(&chip->lock);
tx_buf[0] = INSTRUCTION_RTS(buf_idx);
ret = spi_write(spi, chip->spi_transfer_buf, 1);
if (ret < 0)
dev_dbg(&spi->dev,"%s: failed: ret = %d\n", __FUNCTION__, ret);
up(&chip->lock);
}
#endif
static uint8_t mcp251x_read_state(struct spi_device *spi, uint8_t cmd)
{
struct mcp251x *chip = dev_get_drvdata(&spi->dev);
uint8_t *tx_buf, *rx_buf;
uint8_t val;
int ret;
tx_buf = chip->spi_transfer_buf;
rx_buf = chip->spi_transfer_buf + 8;
down(&chip->lock);
tx_buf[0] = cmd;
ret = spi_write_then_read(spi, tx_buf, 1, rx_buf, 1);
if (ret < 0) {
dev_dbg(&spi->dev,"%s: failed: ret = %d\n", __FUNCTION__, ret);
val = 0;
} else
val = rx_buf[0];
up(&chip->lock);
return val;
}
static uint8_t mcp251x_read_reg(struct spi_device *spi, uint8_t reg)
{
struct mcp251x *chip = dev_get_drvdata(&spi->dev);
uint8_t *tx_buf, *rx_buf;
uint8_t val;
int ret;
tx_buf = chip->spi_transfer_buf;
rx_buf = chip->spi_transfer_buf + 8;
down(&chip->lock);
tx_buf[0] = INSTRUCTION_READ;
tx_buf[1] = reg;
ret = spi_write_then_read(spi, tx_buf, 2, rx_buf, 1);
if (ret < 0) {
dev_dbg(&spi->dev,"%s: failed: ret = %d\n", __FUNCTION__, ret);
val = 0;
} else
val = rx_buf[0];
up(&chip->lock);
return val;
}
static void mcp251x_write_reg(struct spi_device *spi, uint8_t reg, uint8_t val)
{
struct mcp251x *chip = dev_get_drvdata(&spi->dev);
int ret;
down(&chip->lock);
chip->spi_transfer_buf[0] = INSTRUCTION_WRITE;
chip->spi_transfer_buf[1] = reg;
chip->spi_transfer_buf[2] = val;
ret = spi_write(spi, chip->spi_transfer_buf, 3);
if (ret < 0)
dev_dbg(&spi->dev,"%s: failed: ret = %d\n", __FUNCTION__, ret);
up(&chip->lock);
}
static void mcp251x_write_bits(struct spi_device *spi, uint8_t reg, uint8_t mask, uint8_t val)
{
struct mcp251x *chip = dev_get_drvdata(&spi->dev);
int ret;
down(&chip->lock);
chip->spi_transfer_buf[0] = INSTRUCTION_BIT_MODIFY;
chip->spi_transfer_buf[1] = reg;
chip->spi_transfer_buf[2] = mask;
chip->spi_transfer_buf[3] = val;
ret = spi_write(spi, chip->spi_transfer_buf, 4);
if (ret < 0)
dev_dbg(&spi->dev,"%s: failed: ret = %d\n", __FUNCTION__, ret);
up(&chip->lock);
}
static void mcp251x_hw_reset(struct spi_device *spi)
{
struct mcp251x *chip = dev_get_drvdata(&spi->dev);
int ret;
down(&chip->lock);
chip->spi_transfer_buf[0] = INSTRUCTION_RESET;
ret = spi_write(spi, chip->spi_transfer_buf, 1);
if (ret < 0)
dev_dbg(&spi->dev,"%s: failed: ret = %d\n", __FUNCTION__, ret);
up(&chip->lock);
}
static void __devinit mcp251x_hw_init(struct spi_device *spi)
{
mcp251x_hw_reset(spi);
mcp251x_write_reg(spi,0x0c,0x0c);
}
static void mcp251x_hw_sleep(struct spi_device *spi)
{
#if 0 /* sleep disable */
mcp251x_write_reg(spi, CANCTRL, CANCTRL_REQOP_SLEEP);
#endif
}
static void mcp251x_hw_wakeup(struct spi_device *spi)
{
/* Can only wake up by generating a wake-up interrupt. */
mcp251x_write_bits(spi, CANINTE, CANINTE_WAKIE, CANINTE_WAKIE);
mcp251x_write_bits(spi, CANINTF, CANINTF_WAKIF, CANINTF_WAKIF);
mdelay(10);
}
static int mcp251x_set_bit_rate(struct spi_device *spi, int bit_rate)
{
struct mcp251x *chip = dev_get_drvdata(&spi->dev);
unsigned char canctrl,val;
#if 0
struct mcp251x_platform_data *pdata = spi->dev.platform_data;
int tqs; /* tbit/TQ */
int brp;
int ps1, ps2, propseg, sjw;
/* Determine the BRP value that gives the requested bit rate. */
for(brp = 0; brp < 8; brp++) {
tqs = pdata->f_osc / (2 * (brp + 1)) / bit_rate;
if (tqs >= 5 && tqs <= 25
&& (pdata->f_osc / (2 * (brp + 1)) / tqs) == bit_rate)
break;
}
if (brp >= 8)
return -EINVAL;
/* The CAN bus bit time (tbit) is determined by:
* tbit = (SyncSeg + PropSeg + PS1 + PS2) * TQ
* with:
* SyncSeg = 1
* sample point (between PS1 and PS2) must be at 60%-70% of the bit time
* PropSeg + PS1 >= PS2
* PropSeg + PS1 >= Tdelay
* PS2 > SJW
* 1 <= PropSeg <= 8, 1 <= PS1 <=8, 2 <= PS2 <= 8
* SJW = 1 is sufficient in most cases.
* Tdelay is usually 1 or 2 TQ.
*/
propseg = ps1 = ps2 = (tqs - 1) / 3;
if (tqs - (1 + propseg + ps1 + ps2) == 2)
ps1++;
if (tqs - (1 + propseg + ps1 + ps2) == 1)
ps2++;
sjw = 1;
printk("bit rate: BRP = %d, Tbit = %d TQ, PropSeg = %d, PS1 = %d, PS2 = %d, SJW = %d\n",
brp, tqs, propseg, ps1, ps2, sjw);
dev_dbg(&spi->dev,"bit rate: BRP = %d, Tbit = %d TQ, PropSeg = %d, PS1 = %d, PS2 = %d, SJW = %d\n",
brp, tqs, propseg, ps1, ps2, sjw);
mcp251x_write_reg(spi, CNF1, ((sjw-1) << 6) | brp);
mcp251x_write_reg(spi, CNF2, CNF2_BTLMODE | ((ps1-1) << 3) | (propseg-1));
mcp251x_write_bits(spi, CNF3, CNF3_PHSEG2_MASK, (ps2-1));
chip->bit_rate = pdata->f_osc / (2 * (brp + 1)) / tqs;
#endif
#if 1
canctrl = mcp251x_read_reg(spi, CANCTRL);
/* if(canctrl == 0) {
printk("mcp2515 read CANCTRL reg error!\n");
return -1;
} else {
printk("mcp2515 read CANCTRL reg [%x] ok!\n", canctrl);
}*/
do {
mcp251x_write_reg(spi, CANCTRL, CANCTRL_REQOP_CONF);
val = mcp251x_read_reg(spi, CANCTRL);
}while((val&0xe0) != CANCTRL_REQOP_CONF);
switch(bit_rate) {
case 10000:
/* save the state and put it to config mode. */
mcp251x_write_reg(spi, CNF1, CAN_CNF1_10K);
mcp251x_write_reg(spi, CNF2, CAN_CNF2_10K);
mcp251x_write_reg(spi, CNF3, CAN_CNF3_10K);
write_udelay=12800;
break;
case 20000:
mcp251x_write_reg(spi, CNF1, CAN_CNF1_20K);
mcp251x_write_reg(spi, CNF2, CAN_CNF2_20K);
mcp251x_write_reg(spi, CNF3, CAN_CNF3_20K);
write_udelay=6400;
break;
case 50000:
mcp251x_write_reg(spi, CNF1, CAN_CNF1_50K);
mcp251x_write_reg(spi, CNF2, CAN_CNF2_50K);
mcp251x_write_reg(spi, CNF3, CAN_CNF3_50K);
write_udelay=2560;
break;
case 100000:
mcp251x_write_reg(spi, CNF1, CAN_CNF1_100K);
mcp251x_write_reg(spi, CNF2, CAN_CNF2_100K);
mcp251x_write_reg(spi, CNF3, CAN_CNF3_100K);
write_udelay=1280;
break;
case 125000:
mcp251x_write_reg(spi, CNF1, CAN_CNF1_125K);
mcp251x_write_reg(spi, CNF2, CAN_CNF2_125K);
mcp251x_write_reg(spi, CNF3, CAN_CNF3_125K);
write_udelay=1024;
break;
case 250000:
mcp251x_write_reg(spi, CNF1, CAN_CNF1_250K);
mcp251x_write_reg(spi, CNF2, CAN_CNF2_250K);
mcp251x_write_reg(spi, CNF3, CAN_CNF3_250K);
write_udelay=512;
break;
case 500000:
mcp251x_write_reg(spi, CNF1, CAN_CNF1_500K);
mcp251x_write_reg(spi, CNF2, CAN_CNF2_500K);
mcp251x_write_reg(spi, CNF3, CAN_CNF3_500K);
write_udelay=256;
break;
case 750000:
mcp251x_write_reg(spi, CNF1, CAN_CNF1_750K);
mcp251x_write_reg(spi, CNF2, CAN_CNF2_750K);
mcp251x_write_reg(spi, CNF3, CAN_CNF3_750K);
write_udelay=171;
break;
case 800000:
mcp251x_write_reg(spi, CNF1, CAN_CNF1_800K);
mcp251x_write_reg(spi, CNF2, CAN_CNF2_800K);
mcp251x_write_reg(spi, CNF3, CAN_CNF3_800K);
write_udelay=160;
break;
case 1000000:
mcp251x_write_reg(spi, CNF1, CAN_CNF1_1000K);
mcp251x_write_reg(spi, CNF2, CAN_CNF2_1000K);
mcp251x_write_reg(spi, CNF3, CAN_CNF3_1000K);
write_udelay=128;
break;
default:
printk("<kernel>: baud rate %d not support\n", bit_rate);
break;
}
mcp251x_write_reg(spi, CANCTRL, canctrl);
chip->bit_rate = bit_rate;
#endif
return 0;
}
static int mcp251x_get_bit_rate(struct spi_device *spi)
{
struct mcp251x *chip = dev_get_drvdata(&spi->dev);
return chip->bit_rate;
}
static int mcp251x_set_filter(struct spi_device *spi, struct can_filter *filter)
{
struct mcp251x *chip = dev_get_drvdata(&spi->dev);
uint8_t canctrl;
uint8_t local_buf;
int i;
canctrl = mcp251x_read_reg(spi, CANCTRL);
mcp251x_write_bits(spi, CANCTRL, CANCTRL_REQOP_MASK, CANCTRL_REQOP_CONF);
for (i=0; i<CAN_FILTER_REG_NUM; i++) {
if (filter->fid[i].active == 0) {
local_buf = 0;
mcp251x_write_reg(spi, RXF_BASE(i)+0, local_buf);
#if 1
/* set RXFnSIDL EXIDE(bit 3) = 0 for receive standard frame */
mcp251x_write_reg(spi, RXF_BASE(i)+1, local_buf);
#else /* set RXFnSIDL EXIDE(bit 3) = 1 for receive extend frame */
mcp251x_write_reg(spi, RXF_BASE(i)+1, local_buf | 0x08);
#endif
mcp251x_write_reg(spi, RXF_BASE(i)+2, local_buf);
mcp251x_write_reg(spi, RXF_BASE(i)+3, local_buf);
continue;
}
local_buf = filter->fid[i].id >> 3;
mcp251x_write_reg(spi, RXF_BASE(i)+0, local_buf);
local_buf = (filter->fid[i].id << 5) | (filter->fid[i].ide << 3) | (filter->fid[i].eid >> 16);
#if 1
mcp251x_write_reg(spi, RXF_BASE(i)+1, local_buf);
#else
mcp251x_write_reg(spi, RXF_BASE(i)+1, local_buf | 0x08);
#endif
local_buf = filter->fid[i].eid >> 8;
mcp251x_write_reg(spi, RXF_BASE(i)+2, local_buf);
local_buf = filter->fid[i].eid;
mcp251x_write_reg(spi, RXF_BASE(i)+3, local_buf);
}
for (i=0; i<2; i++) {
local_buf = filter->sidmask >> 3;
mcp251x_write_reg(spi, RXM_BASE(i)+0, local_buf);
local_buf = (filter->sidmask << 5) | (filter->eidmask >> 16);
mcp251x_write_reg(spi, RXM_BASE(i)+1, local_buf);
local_buf = filter->eidmask >> 8;
mcp251x_write_reg(spi, RXM_BASE(i)+2, local_buf);
local_buf = filter->eidmask;
mcp251x_write_reg(spi, RXM_BASE(i)+3, local_buf);
}
mcp251x_write_reg(spi, CANCTRL, canctrl);
/* set receive buffer work mode */
mcp251x_write_bits(spi, RXBCTRL(0), RXBCTRL_MASK, filter->mode << 5);
mcp251x_write_bits(spi, RXBCTRL(1), RXBCTRL_MASK, filter->mode << 5);
memcpy(&chip->filter, filter, sizeof(struct can_filter));
return 0;
}
static int mcp251x_get_filter(struct spi_device *spi, struct can_filter *filter)
{
struct mcp251x *chip = dev_get_drvdata(&spi->dev);
memcpy(filter, &chip->filter, sizeof(struct can_filter));
return 0;
}
/* If MCP251X ready, copy data from ring buffer to MCP251X send buffer and set
* TXBCTRL_TXREQ.
*/
static int mcp251x_hw_tx(struct spi_device *spi, int tx_buf_idx)
{
struct mcp251x *chip = dev_get_drvdata(&spi->dev);
uint8_t buf[13] ;
// unsigned char val;
struct can_frame *frame;
// int ret;
int i;
dev_dbg(&spi->dev,"%s()\n", __FUNCTION__);
if (chip->txbout != chip->txbin) {
if (down_interruptible(&chip->txblock))
return -ERESTARTSYS;
frame = &chip->txb[chip->txbout];
// down(&chip->lock);
if (frame->header.dlc > CAN_FRAME_MAX_DATA_LEN)
frame->header.dlc = CAN_FRAME_MAX_DATA_LEN;
if (frame->header.ide == 0)
frame->header.eid = 0;
/*
buf[0] = INSTRUCTION_LOAD_TXB(tx_buf_idx);
buf[1] = frame->header.id >> 3;
buf[2] = (frame->header.id << 5) | (frame->header.ide << 3)
| (frame->header.eid >> 16);
buf[3] = frame->header.eid >> 8;
buf[4] = frame->header.eid;
buf[5] = (frame->header.rtr << 6) | frame->header.dlc;
memcpy(buf + 6, frame->data, frame->header.dlc);
for(i=0;i<frame->header.dlc+6;i++) {
printk("buf[%d] : %d\n",i,buf[i]);
}
ret = spi_write(spi, buf, 6 + CAN_FRAME_MAX_DATA_LEN);
if (ret < 0)
dev_dbg(&spi->dev,"%s: failed: ret = %d\n", __FUNCTION__, ret);
*/
buf[0] = frame->header.id >> 3;
buf[1] = (frame->header.id << 5) | (frame->header.ide << 3) | (frame->header.eid >> 16);
buf[2] = frame->header.eid >> 8;
buf[3] = frame->header.eid;
buf[4] = (frame->header.rtr << 6) | frame->header.dlc;
memcpy(buf + 5, frame->data, frame->header.dlc);
/*
for(i=0;i<frame->header.dlc+5;i++) {
printk("buf[%d] : %x\n",i,buf[i]);
}
*/
if (tx_buf_idx == 0) {
for(i=0;i<(frame->header.dlc+5);i++) {
mcp251x_write_reg(spi,(0x31+i),buf[i]);
}
} else if(tx_buf_idx ==1) {
for(i=0;i<(frame->header.dlc+5);i++) {
mcp251x_write_reg(spi,(0x41+i),buf[i]);
}
} else {
for(i=0;i<(frame->header.dlc+5);i++) {
mcp251x_write_reg(spi,(0x51+i),buf[i]);
}
}
// up(&chip->lock);
/* update pos of ring buffer */
chip->txbout++;
if (chip->txbout >= MCP251X_BUF_LEN)
chip->txbout = 0;
up(&chip->txblock);
mcp251x_write_reg(spi, TXBCTRL(tx_buf_idx), TXBCTRL_TXREQ);
}
return 0;
}
/* Receive data from internat buffer of MCP251X and save it to ring buffer.
*/
static int mcp251x_hw_rx(struct spi_device *spi, int buf_idx)
{
struct mcp251x *chip = dev_get_drvdata(&spi->dev);
uint8_t rx_buf[13];
// int ret;
struct can_frame *frame;
int i;
if (down_interruptible(&chip->rxblock))
return -ERESTARTSYS;
frame = &chip->rxb[chip->rxbin];
// down(&chip->lock);
/*
buf[0] = INSTRUCTION_READ_RXB(buf_idx);
rx_buf = buf + (6 + CAN_FRAME_MAX_DATA_LEN);
ret = spi_write_then_read(spi, buf, 1, rx_buf, 13);
if (ret < 0)
dev_dbg(&spi->dev, "%s: failed: ret = %d\n", __FUNCTION__, ret);
*/
if (buf_idx == 0)
for(i=0;i<(5 + CAN_FRAME_MAX_DATA_LEN);i++) {
rx_buf[i] = mcp251x_read_reg(spi,0x61+i);
}
else
for(i=0;i<(5 + CAN_FRAME_MAX_DATA_LEN);i++) {
rx_buf[i] = mcp251x_read_reg(spi,0x71+i);
}
frame->header.id = (rx_buf[0] << 3) | (rx_buf[1] >> 5);
frame->header.ide = (rx_buf[1] >> 3) & 0x1;
frame->header.srr = (rx_buf[1] >> 4) & 0x1;
if (frame->header.ide == 1)
frame->header.eid = (rx_buf[1] << 16) | (rx_buf[2] << 8) | rx_buf[3];
else
frame->header.eid = 0;
frame->header.rtr = (rx_buf[4] >> 6) & 0x1;
frame->header.rb1 = (rx_buf[4] >> 5) & 0x1;
frame->header.rb0 = (rx_buf[4] >> 4) & 0x1;
frame->header.dlc = rx_buf[4] & 0x0f;
memcpy(frame->data, rx_buf + 5, CAN_FRAME_MAX_DATA_LEN);
// up(&chip->lock);
/* update pos of ring buffer */
chip->rxbin++;
if (chip->rxbin >= MCP251X_BUF_LEN)
chip->rxbin = 0;
up(&chip->rxblock);
return 0;
}
/* ........................................................................ */
/* bottom half task for interrupt */
#if (LINUX_VERSION_CODE >= KERNEL_VERSION(2,6,20))
static void mcp251x_irq_handler(struct work_struct *work)
{
struct mcp251x *chip = container_of(work, struct mcp251x, irq_work);
struct spi_device *spi = chip->spi;
#else
static void mcp251x_irq_handler(void *dev_id)
{
struct spi_device *spi = dev_id;
struct mcp251x *chip = dev_get_drvdata(&spi->dev);
#endif
uint8_t intf, rxs;
for(;;) {
intf = mcp251x_read_reg(spi, CANINTF);
if (intf == 0x00)
break;
dev_dbg(&spi->dev,"interrupt:%s%s%s%s%s%s%s%s\n",
(intf & CANINTF_MERRF) ? " MERR":"",
(intf & CANINTF_WAKIF) ? " WAK":"",
(intf & CANINTF_ERRIF) ? " ERR":"",
(intf & CANINTF_TX2IF) ? " TX2":"",
(intf & CANINTF_TX1IF) ? " TX1":"",
(intf & CANINTF_TX0IF) ? " TX0":"",
(intf & CANINTF_RX1IF) ? " RX1":"",
(intf & CANINTF_RX0IF) ? " RX0":"");
rxs = mcp251x_read_state(spi, INSTRUCTION_RX_STATE);
dev_dbg(&spi->dev,
"rx_state:%s%s\n",
(rxs & RX_STATE_IDE) ? " IDE":"",
(rxs & RX_STATE_RTR) ? " RTR":"");
if (intf & CANINTF_MERRF) {
#if 0
uint8_t txbnctrl;
/* if there are no pending Tx buffers, restart queue */
txbnctrl = mcp251x_read_reg(spi, TXBCTRL(0));
if (!(txbnctrl & TXBCTRL_TXREQ))
netif_wake_queue(&chip->can->ndev);
#endif
}
if (intf & CANINTF_ERRIF) {
uint8_t eflg = mcp251x_read_reg(spi, EFLG);
dev_dbg(&spi->dev, "EFLG = 0x%02x\n", eflg);
if (eflg & (EFLG_RX0OVR | EFLG_RX1OVR)) {
#if 0
if (eflg & EFLG_RX0OVR)
chip->stats.rx_over_errors++;
if (eflg & EFLG_RX1OVR)
chip->stats.rx_over_errors++;
#endif
mcp251x_write_reg(spi, EFLG, 0x00);
}
}
if (intf & CANINTF_TX0IF) /* If ready to send, copy data to send buffer. */
mcp251x_hw_tx(spi, 0);
if (intf & CANINTF_TX1IF)
mcp251x_hw_tx(spi, 1);
if (intf & CANINTF_TX2IF)
mcp251x_hw_tx(spi, 2);
if (intf & CANINTF_RX0IF) /* If received data, copy data to ring buffer. */
mcp251x_hw_rx(spi, 0);
if (intf & CANINTF_RX1IF)
mcp251x_hw_rx(spi, 1);
mcp251x_write_bits(spi, CANINTF, intf, 0x00);
/* If ring buffer of receive is not empty, wake up the read queue. */
if (chip->rxbin != chip->rxbout)
wake_up_interruptible(&chip->wq);
}
}
static irqreturn_t mcp251x_irq(int irq, void *dev_id)
{
struct spi_device *spi = dev_id;
struct mcp251x *chip = dev_get_drvdata(&spi->dev);
/* Can't do anything in interrupt context so fire of the interrupt
* handling workqueue. */
schedule_work(&chip->irq_work);
return IRQ_HANDLED;
}
/* ........................................................................ */
static int mcp251x_open(struct inode *inode, struct file *file)
{
struct mcp251x *chip = container_of(inode->i_cdev, struct mcp251x, cdev);
struct spi_device *spi = chip->spi;
struct mcp251x_platform_data *pdata = spi->dev.platform_data;
file->private_data = chip;
if (!chip->count) {
if (pdata->transceiver_enable)
pdata->transceiver_enable(1);
mcp251x_hw_reset(spi);
mcp251x_hw_wakeup(spi);
/* Enable interrupts */
mcp251x_write_reg(spi, CANINTE,
CANINTE_ERRIE | CANINTE_TX2IE
| CANINTE_TX1IE | CANINTE_TX0IE
| CANINTE_RX1IE | CANINTE_RX0IE);
/* put device into normal mode */
mcp251x_write_reg(spi, CANCTRL, CANCTRL_REQOP_NORMAL);
mcp251x_write_reg(spi, RXBCTRL(0), RXBCTRL_BULK);
}
chip->count++;
return 0;
}
static int mcp251x_release(struct inode *inode, struct file *file)
{
struct mcp251x *chip = container_of(inode->i_cdev, struct mcp251x, cdev);
struct spi_device *spi = chip->spi;
struct mcp251x_platform_data *pdata = spi->dev.platform_data;
chip->count--;
if (chip->count)
return 0;
/* disable and clear pending interrupts */
mcp251x_write_reg(spi, CANINTE, 0x00);
mcp251x_write_reg(spi, CANINTF, 0x00);
/* go to sleep */
mcp251x_hw_sleep(spi);
if (pdata->transceiver_enable)
pdata->transceiver_enable(0);
return 0;
}
static int mcp251x_write(struct file *file, const char __user *buf, size_t count, loff_t *ofs)
{
struct mcp251x *chip = file->private_data;
struct spi_device *spi = chip->spi;
struct can_frame *frame;
int ret;
uint8_t txreq;
if (count < sizeof(struct can_frame))
return -EINVAL;
if (down_interruptible(&chip->txblock))
return -ERESTARTSYS;
frame = &chip->txb[chip->txbin];
ret = copy_from_user(frame, buf, sizeof(struct can_frame));
chip->txbin++;
if (chip->txbin >= MCP251X_BUF_LEN)
chip->txbin = 0;
up(&chip->txblock);
txreq = mcp251x_read_state(spi, INSTRUCTION_CAN_STATE);
if (!(txreq & CAN_STATE_TX0REQ))
mcp251x_hw_tx(spi, 0);
if (!(txreq & CAN_STATE_TX1REQ))
mcp251x_hw_tx(spi, 1);
if (!(txreq & CAN_STATE_TX2REQ))
mcp251x_hw_tx(spi, 2);
udelay(write_udelay);
return count;
}
static ssize_t mcp251x_read(struct file *file, char __user *buf, size_t count, loff_t *ofs)
{
struct mcp251x *chip = file->private_data;
struct can_frame *frame;
if (count != sizeof(struct can_frame))
return -EINVAL;
if (down_interruptible(&chip->rxblock))
return -ERESTARTSYS;
while (chip->rxbin == chip->rxbout) {
up(&chip->rxblock);
if (file->f_flags & O_NONBLOCK)
return -EAGAIN;
if (wait_event_interruptible(chip->wq, (chip->rxbin != chip->rxbout)))
return -ERESTARTSYS;
if (down_interruptible(&chip->rxblock))
return -ERESTARTSYS;
}
frame = &chip->rxb[chip->rxbout];
if (copy_to_user(buf, frame, sizeof(struct can_frame))) {
up(&chip->rxblock);
return -EFAULT;
}
chip->rxbout++;
if(chip->rxbout >= MCP251X_BUF_LEN)
chip->rxbout = 0;
up(&chip->rxblock);
return count;
#if 0
retry:
if (chip->rxbin != chip->rxbout) {
down(&chip->rxblock);
frame = &chip->rxb[chip->rxbout];
if (copy_to_user(buf, frame, sizeof(struct can_frame))) {
up(&chip->rxblock);
return -EFAULT;
}
chip->rxbout++;
if(chip->rxbout >= MCP251X_BUF_LEN)
chip->rxbout = 0;
up(&chip->rxblock);
return count;
}
else {
if (file->f_flags & O_NONBLOCK)
return -EAGAIN;
interruptible_sleep_on(&chip->wq);
if (signal_pending(current))
return -ERESTARTSYS;
goto retry;
}
#endif
}
static int mcp251x_ioctl(struct inode *inode, struct file *file,
unsigned int cmd, unsigned long arg)
{
struct mcp251x *chip = container_of(inode->i_cdev, struct mcp251x, cdev);
struct spi_device *spi = chip->spi;
int ret = 0;
switch(cmd) {
case CAN_IOCTRESET: /* reset devcie */
mcp251x_hw_reset(spi);
break;
case CAN_IOCTWAKEUP: /* wake up device */
mcp251x_hw_wakeup(spi);
break;
case CAN_IOCSRATE: /* set bit rate */
ret = mcp251x_set_bit_rate(spi, (int)arg);
mdelay(10);
break;
case CAN_IOCGRATE: /* get bit rate */
*((int *)arg) = mcp251x_get_bit_rate(spi);
break;
case CAN_IOCSFILTER: /* set filter */
ret = mcp251x_set_filter(spi, (struct can_filter *)arg);
break;
case CAN_IOCGFILTER: /* get filter */
ret = mcp251x_get_filter(spi, (struct can_filter *)arg);
break;
case CAN_IOCTNORMALMODE: /* turn to normal mode */
//mcp251x_write_bits(spi, CANCTRL, CANCTRL_REQOP_MASK, CANCTRL_REQOP_NORMAL);
mcp251x_write_reg(spi, CANCTRL, CANCTRL_REQOP_NORMAL);
break;
case CAN_IOCTLOOPBACKMODE: /* turn to loopback mode */
//mcp251x_write_bits(spi, CANCTRL, CANCTRL_REQOP_MASK, CANCTRL_REQOP_LOOPBACK);
mcp251x_write_reg(spi, CANCTRL, CANCTRL_REQOP_LOOPBACK);
break;
case CAN_IOCTLISTENONLYMODE: /* turn to listen only mode */
//mcp251x_write_bits(spi, CANCTRL, CANCTRL_REQOP_MASK, CANCTRL_REQOP_LISTEN_ONLY);
mcp251x_write_reg(spi, CANCTRL, CANCTRL_REQOP_LISTEN_ONLY);
break;
case CAN_IOCTSLEEPMODE: /* turn to sleep mode */
mcp251x_hw_sleep(spi);
break;
default:
return -ENOTTY;
}
return ret;
}
static const struct file_operations mcp251x_fops = {
.owner = THIS_MODULE,
.read = mcp251x_read,
.write = mcp251x_write,
.ioctl = mcp251x_ioctl,
.open = mcp251x_open,
.release = mcp251x_release,
};
/* ........................................................................ */
static int __devexit mcp251x_remove(struct spi_device *spi)
{
struct mcp251x *chip = dev_get_drvdata(&spi->dev);
dev_dbg(&spi->dev, "%s: stop\n", __FUNCTION__);
device_unregister(chip->class_dev);
cdev_del(&chip->cdev);
free_irq(spi->irq, spi);
kfree(chip->spi_transfer_buf);
return 0;
}
static int __devinit mcp251x_probe(struct spi_device *spi)
{
struct mcp251x *chip;
int ret = 0;
int irq;
dev_dbg(&spi->dev,"%s: start\n", __FUNCTION__);
chip = kmalloc(sizeof(struct mcp251x), GFP_KERNEL);
if (!chip) {
ret = -ENOMEM;
goto error_alloc;
}
dev_set_drvdata(&spi->dev, chip);
chip->txbin = chip->txbout = 0;
chip->rxbin = chip->rxbout = 0;
chip->count = 0;
chip->spi = spi;
init_MUTEX(&chip->lock);
init_MUTEX(&chip->txblock);
init_MUTEX(&chip->rxblock);
init_waitqueue_head(&chip->wq);
#if (LINUX_VERSION_CODE >= KERNEL_VERSION(2,6,20))
INIT_WORK(&chip->irq_work, mcp251x_irq_handler);
#else
INIT_WORK(&chip->irq_work, mcp251x_irq_handler, spi);
#endif
chip->spi_transfer_buf = kmalloc(SPI_TRANSFER_BUF_LEN, GFP_KERNEL);
if (!chip->spi_transfer_buf) {
ret = -ENOMEM;
goto error_buf;
}
ret = gpio_request(spi->irq, spi->modalias);
if (ret < 0) {
pr_err("mcp251x: failed to request GPIO %d,"
" error %d\n", spi->irq, ret);
goto error_irq;
}
ret = gpio_direction_input(spi->irq);
if (ret < 0) {
pr_err("mcp251x: failed to configure input"
" direction for GPIO %d, error %d\n",
spi->irq, ret);
gpio_free(spi->irq);
goto error_irq;
}
irq = gpio_to_irq(spi->irq);
if (irq < 0) {
ret = irq;
pr_err("mcp251x: Unable to get irq number"
" for GPIO %d, error %d\n",
spi->irq, ret);
gpio_free(spi->irq);
goto error_irq;
}
ret = request_irq(irq, mcp251x_irq,IRQF_SAMPLE_RANDOM, DRIVER_NAME, spi);// SA_SAMPLE_RANDOM,
if (ret < 0) {
dev_err(&spi->dev,"request irq %d failed (ret = %d)\n", spi->irq, ret);
gpio_free(spi->irq);
goto error_irq;
}
cdev_init(&chip->cdev, &mcp251x_fops);
chip->cdev.owner = THIS_MODULE;
ret = cdev_add(&chip->cdev, MKDEV(MAJOR(can_devt), can_minor), 1);
if (ret < 0) {
dev_err(&spi->dev, "register char device failed (ret = %d)\n", ret);
goto error_register;
}
chip->class_dev = device_create(can_class, NULL,
MKDEV(MAJOR(can_devt), can_minor),
&spi->dev, "can%d", can_minor);
if (IS_ERR(chip->class_dev)) {
dev_err(&spi->dev, "cannot create CAN class device\n");
ret = PTR_ERR(chip->class_dev);
goto error_class_reg;
}
dev_info(&spi->dev, "device register at dev(%d:%d)\n",
MAJOR(can_devt), can_minor);
mcp251x_hw_init(spi);
ret = mcp251x_set_bit_rate(spi, 125000); /* A reasonable default */
if(ret == -1) {
printk("mcp2515 set bit rate error!\n");
cdev_del(&chip->cdev);
free_irq(spi->irq, spi);
kfree(chip->spi_transfer_buf);
kfree(chip);
return ret;
}
mcp251x_hw_sleep(spi);
can_minor++;
return 0;
error_class_reg:
cdev_del(&chip->cdev);
error_register:
free_irq(spi->irq, spi);
error_irq:
free_irq(gpio_to_irq(spi->irq), spi);
gpio_free(spi->irq);
kfree(chip->spi_transfer_buf);
error_buf:
kfree(chip);
error_alloc:
return ret;
}
#ifdef CONFIG_PM
static int mcp251x_suspend(struct spi_device *spi, pm_message_t mesg)
{
struct mcp251x *chip = dev_get_drvdata(&spi->dev);
struct mcp251x_platform_data *pdata = spi->dev.platform_data;
if (chip->count)
return 0;
mcp251x_hw_sleep(spi);
if (pdata->transceiver_enable)
pdata->transceiver_enable(0);
return 0;
}
static int mcp251x_resume(struct spi_device *spi)
{
struct mcp251x *chip = dev_get_drvdata(&spi->dev);
struct mcp251x_platform_data *pdata = spi->dev.platform_data;
if (!chip->count)
return 0;
if (pdata->transceiver_enable)
pdata->transceiver_enable(1);
mcp251x_hw_wakeup(spi);
return 0;
}
#endif
static struct spi_driver mcp251x_driver = {
.driver = {
.name = DRIVER_NAME,
.bus = &spi_bus_type,
.owner = THIS_MODULE,
},
.probe = mcp251x_probe,
.remove = __devexit_p(mcp251x_remove),
#ifdef CONFIG_PM
.suspend = mcp251x_suspend,
.resume = mcp251x_resume,
#endif
};
static int __init mcp251x_init(void)
{
int ret;
can_class = class_create(THIS_MODULE, "can");
if (IS_ERR(can_class))
return PTR_ERR(can_class);
ret = alloc_chrdev_region(&can_devt, 0, CAN_DEV_MAX, DRIVER_NAME);
if (ret < 0) {
printk(KERN_ERR "%s: failed to allocate char dev region\n",
__FILE__);
class_destroy(can_class);
return ret;
}
return spi_register_driver(&mcp251x_driver);
}
module_init(mcp251x_init);
static void __exit mcp251x_exit(void)
{
class_destroy(can_class);
unregister_chrdev_region(can_devt, CAN_DEV_MAX);
spi_unregister_driver(&mcp251x_driver);
}
module_exit(mcp251x_exit);
MODULE_DESCRIPTION("MCP251x CAN controller driver");
MODULE_LICENSE("GPL");
MODULE_AUTHOR("Quanlin.Bai");