双边滤波与引导滤波
双边滤波
双边滤波很有名,使用广泛,简单的说就是一种同时考虑了像素空间差异与强度差异的滤波器,因此具有保持图像边缘的特性。
先看看我们熟悉的高斯滤波器

其中W是权重,i和j是像素索引,K是归一化常量。公式中可以看出,权重只和像素之间的空间距离有关系,无论图像的内容是什么,都有相同的滤波效果。
再来看看双边滤波器,它只是在原有高斯函数的基础上加了一项,如下
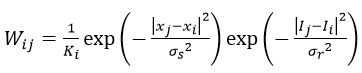
其中 I 是像素的强度值,所以在强度差距大的地方(边缘),权重会减小,滤波效应也就变小。总体而言,在像素强度变换不大的区域,双边滤波有类似于高斯滤波的效果,而在图像边缘等强度梯度较大的地方,可以保持梯度。
引导滤波
引导滤波是近三年才出现的滤波技术,知道的人还不多。它与双边滤波最大的相似之处,就是同样具有保持边缘特性。在引导滤波的定义中,用到了局部线性模型,至于该模型,可以暂时用下图简单的理解
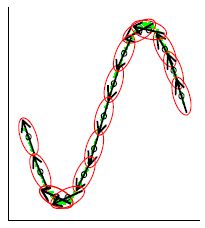
该模型认为,某函数上一点与其邻近部分的点成线性关系,一个复杂的函数就可以用很多局部的线性函数来表示,当需要求该函数上某一点的值时,只需计算所有包含该点的线性函数的值并做平均即可。这种模型,在表示非解析函数上,非常有用。
同理,我们可以认为图像是一个二维函数,而且没法写出解析表达式,因此我们假设该函数的输出与输入在一个二维窗口内满足线性关系,如下
![]()
其中,q是输出像素的值,I是输入图像的值,i和k是像素索引,a和b是当窗口中心位于k时该线性函数的系数。其实,输入图像不一定是待滤波的图像本身,也可以是其他图像即引导图像,这也是为何称为引导滤波的原因。对上式两边取梯度,可以得到
![]()
即当输入图像I有梯度时,输出q也有类似的梯度,现在可以解释为什么引导滤波有边缘保持特性了。
下一步是求出线性函数的系数,也就是线性回归,即希望拟合函数的输出值与真实值p之间的差距最小,也就是让下式最小

这里p只能是待滤波图像,并不像I那样可以是其他图像。同时,a之前的系数(以后都写为e)用于防止求得的a过大,也是调节滤波器滤波效果的重要参数。通过最小二乘法,我们可以得到

其中,![]() 是I在窗口w_k中的平均值,
是I在窗口w_k中的平均值,![]() 是I在窗口w_k中的方差,
是I在窗口w_k中的方差,![]() 是窗口w_k中像素的数量,
是窗口w_k中像素的数量,![]() 是待滤波图像p在窗口w_k中的均值。
是待滤波图像p在窗口w_k中的均值。
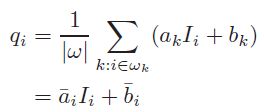
在计算每个窗口的线性系数时,我们可以发现一个像素会被多个窗口包含,也就是说,每个像素都由多个线性函数所描述。因此,如之前所说,要具体求某一点的输出值时,只需将所有包含该点的线性函数值平均即可,如下
这里,w_k是所有包含像素i的窗口,k是其中心位置。
当把引导滤波用作边缘保持滤波器时,往往有 I = p ,如果e=0,显然a=1, b=0是E(a,b)为最小值的解,从上式可以看出,这时的滤波器没有任何作用,将输入原封不动的输出。如果e>0,在像素强度变化小的区域(或单色区域),有a近似于(或等于)0,而b近似于(或等于)![]() ,即做了一个加权均值滤波;而在变化大的区域,a近似于1,b近似于0,对图像的滤波效果很弱,有助于保持边缘。而e的作用就是界定什么是变化大,什么是变化小。在窗口大小不变的情况下,随着e的增大,滤波效果越明显。
,即做了一个加权均值滤波;而在变化大的区域,a近似于1,b近似于0,对图像的滤波效果很弱,有助于保持边缘。而e的作用就是界定什么是变化大,什么是变化小。在窗口大小不变的情况下,随着e的增大,滤波效果越明显。
在滤波效果上,引导滤波和双边滤波差不多,在一些细节上,引导滤波较好。引导滤波最大的优势在于,可以写出时间复杂度与窗口大小无关的算法(打算在之后的文章中讨论),因此在使用大窗口处理图片时,其效率更高。
关于引导滤波更多的讨论和应用,可以参看下面的论文
GuidedFilter_ECCV10.pdf
引导滤波的OpenCV实现
上一篇文章已经说了引导滤波的基本理论,而且我们也知道引导滤波可以写出时间复杂度与窗口大小无关的算法,现在就来使用C++并借助OpenCV实现这一算法。
实现这种算法的关键思想是盒式滤波(box filter),而且必须是通过积分图来实现的盒式滤波,否则不可能与窗口大小无关,好在OpenCV的boxFilter函数满足这个要求。
再看看引导滤波的公式
先计算a_k的分子,Ip 在窗口w_k中的和,再除以窗口中像素的个数,刚好就是盒式滤波,因此我们可以将输入的引导图像 I 和滤波图像 p 相乘,并对相乘后的图像做box filtering,即得第一项的结果。后面的![]() 和
和![]() 分别为 I 和 p 在窗口w_k中均值,因此分别对 I 和 p 进行box filtering,再将box filtering之后的结果相乘即可。实际上,a_k的分子就是 Ip 在窗口w_k中的协方差。
分别为 I 和 p 在窗口w_k中均值,因此分别对 I 和 p 进行box filtering,再将box filtering之后的结果相乘即可。实际上,a_k的分子就是 Ip 在窗口w_k中的协方差。
接下来计算a_k的分母部分。![]() 是引导图 I 在窗口w_k中的方差,学过概率论与数理统计的朋友应该知道,方差和期望(均值)之间是有关系的,如下式
是引导图 I 在窗口w_k中的方差,学过概率论与数理统计的朋友应该知道,方差和期望(均值)之间是有关系的,如下式
![]()
因此在计算 I 的方差时,我们可以先计算 I*I 的均值,再减去 I 均值的平方即![]() 的平方。在方法上,计算 I*I 的均值和计算 Ip 的均值是一样的。最后,对计算出来的方差图像,加上常量e(每个元素都加e),分母就计算完了,自然,a_k在所有窗口中的值也就得到了。b_k的计算太简单了,大家都懂的。
的平方。在方法上,计算 I*I 的均值和计算 Ip 的均值是一样的。最后,对计算出来的方差图像,加上常量e(每个元素都加e),分母就计算完了,自然,a_k在所有窗口中的值也就得到了。b_k的计算太简单了,大家都懂的。
注意,我们的计算都是对整个图像的,以图像为单位进行计算,所以最后算出的也是两张图,a_k的图(左边)和b_k的图(右边),如下


在图中可以看到,在边缘部分或变化剧烈的部分,a的值接近于1(白色),b的值接近为0(黑色),而在变化平坦的区域,a的值接近0(黑色),b的值为平坦区域像素的均值。这与上一篇文章中所说的规律是一致的。
下面看第二个公式
输出值q又与两个均值有关,分别为a和b在窗口w_i中的均值(不是w_k),所以还是box filtering,我们将上一步得到两个图像都进行盒式滤波,得到两个新图:a_i和b_i,然后用a_i乘以引导图像 I ,再加上b_i,即得最终滤波之后的输出,如下(左边为原图,右边为滤波之后的图像,其中滤波窗口半径为8,e的值为500):


下面是整个算法的代码,仅供参考
- void guidedFilter(Mat& source, Mat& guided_image, Mat& output, int radius, float epsilon)
- {
- CV_Assert(radius >= 2 && epsilon > 0);
- CV_Assert(source.data != NULL && source.channels() == 1);
- CV_Assert(guided_image.channels() == 1);
- CV_Assert(source.rows == guided_image.rows && source.cols == guided_image.cols);
- Mat guided;
- if (guided_image.data == source.data)
- {
- //make a copy
- guided_image.copyTo(guided);
- }
- else
- {
- guided = guided_image;
- }
- //将输入扩展为32位浮点型,以便以后做乘法
- Mat source_32f, guided_32f;
- makeDepth32f(source, source_32f);
- makeDepth32f(guided, guided_32f);
- //计算I*p和I*I
- Mat mat_Ip, mat_I2;
- multiply(guided_32f, source_32f, mat_Ip);
- multiply(guided_32f, guided_32f, mat_I2);
- //计算各种均值
- Mat mean_p, mean_I, mean_Ip, mean_I2;
- Size win_size(2*radius + 1, 2*radius + 1);
- boxFilter(source_32f, mean_p, CV_32F, win_size);
- boxFilter(guided_32f, mean_I, CV_32F, win_size);
- boxFilter(mat_Ip, mean_Ip, CV_32F, win_size);
- boxFilter(mat_I2, mean_I2, CV_32F, win_size);
- //计算Ip的协方差和I的方差
- Mat cov_Ip = mean_Ip - mean_I.mul(mean_p);
- Mat var_I = mean_I2 - mean_I.mul(mean_I);
- var_I += epsilon;
- //求a和b
- Mat a, b;
- divide(cov_Ip, var_I, a);
- b = mean_p - a.mul(mean_I);
- //对包含像素i的所有a、b做平均
- Mat mean_a, mean_b;
- boxFilter(a, mean_a, CV_32F, win_size);
- boxFilter(b, mean_b, CV_32F, win_size);
- //计算输出 (depth == CV_32F)
- output = mean_a.mul(guided_32f) + mean_b;
- }
- void guidedFilter(Mat& source, Mat& guided_image, Mat& output, int radius, float epsilon)
- {
- CV_Assert(radius >= 2 && epsilon > 0);
- CV_Assert(source.data != NULL && source.channels() == 1);
- CV_Assert(guided_image.channels() == 1);
- CV_Assert(source.rows == guided_image.rows && source.cols == guided_image.cols);
- Mat guided;
- if (guided_image.data == source.data)
- {
- //make a copy
- guided_image.copyTo(guided);
- }
- else
- {
- guided = guided_image;
- }
- //将输入扩展为32位浮点型,以便以后做乘法
- Mat source_32f, guided_32f;
- makeDepth32f(source, source_32f);
- makeDepth32f(guided, guided_32f);
- //计算I*p和I*I
- Mat mat_Ip, mat_I2;
- multiply(guided_32f, source_32f, mat_Ip);
- multiply(guided_32f, guided_32f, mat_I2);
- //计算各种均值
- Mat mean_p, mean_I, mean_Ip, mean_I2;
- Size win_size(2*radius + 1, 2*radius + 1);
- boxFilter(source_32f, mean_p, CV_32F, win_size);
- boxFilter(guided_32f, mean_I, CV_32F, win_size);
- boxFilter(mat_Ip, mean_Ip, CV_32F, win_size);
- boxFilter(mat_I2, mean_I2, CV_32F, win_size);
- //计算Ip的协方差和I的方差
- Mat cov_Ip = mean_Ip - mean_I.mul(mean_p);
- Mat var_I = mean_I2 - mean_I.mul(mean_I);
- var_I += epsilon;
- //求a和b
- Mat a, b;
- divide(cov_Ip, var_I, a);
- b = mean_p - a.mul(mean_I);
- //对包含像素i的所有a、b做平均
- Mat mean_a, mean_b;
- boxFilter(a, mean_a, CV_32F, win_size);
- boxFilter(b, mean_b, CV_32F, win_size);
- //计算输出 (depth == CV_32F)
- output = mean_a.mul(guided_32f) + mean_b;
- }
- void makeDepth32f(Mat& source, Mat& output)
- {
- if (source.depth() != CV_32F ) > FLT_EPSILON)
- source.convertTo(output, CV_32F);
- else
- output = source;
- }
- void makeDepth32f(Mat& source, Mat& output)
- {
- if (source.depth() != CV_32F ) > FLT_EPSILON)
- source.convertTo(output, CV_32F);
- else
- output = source;
- }