OpenCV学习笔记-反向投影直方图检测特定图像内容
反向投影直方图检测特定图像内容
Opencv计算机视觉编程攻略(第二版)在第4.5节介绍了反向投影直方图检测图像中的特定内容。本文为学习笔记、示例程序的实现方法以及自己的一些体会。本例的工程共包含3个头文件和一个源文件。3个头文件分别定义了1维直方图Histogram1D和3维直方图ColorHistogram操作方法,以及直方图检测方法ContentFinder的类。源文件为主程序。
#include "histogram.h" //定义1维灰度直方图的获取与绘制方法类:class Histogram1D #include "colorhistogram.h" //定义3维彩色直方图的获取与绘制方法类:class ColorHistogram #include "contentFinder.h" //定义反向投影直方图检测方法的类:class ContentFinder
本例中使用的图像如下:
1.直方图操作方法
(1)1维灰度直方图操作方法
头文件histogram.h中定义了操作1维灰度直方图的方法类class Histogram1D。histogram.h代码如下:
#if !defined HISTOGRAM
#define HISTOGRAM
#include <opencv2\core\core.hpp>
#include <opencv2\imgproc\imgproc.hpp>
// To create histograms of gray-level images
class Histogram1D { //将算法封装进类
private:
int histSize[1]; // number of bins in histogram直方图中箱子(bin)个数,[1]表示只有1维
float hranges[2]; // range of values值范围,min和max共2个值,因此定义2维浮点数组
const float* ranges[1]; // pointer to the different value ranges值范围的指针
int channels[1]; // channel number to be examined要检查的通道数量
public:
Histogram1D() {
// Prepare default arguments for 1D histogram
histSize[0]= 256; // 256 bins,只有1维,因此通过[0]来设置该维的箱子数
hranges[0]= 0.0; // from 0 (inclusive)直方图取值范围的min
hranges[1]= 256.0; // to 256 (exclusive)直方图取值范围的max
ranges[0]= hranges;
channels[0]= 0; // we look at channel 0,1维直方图暂时只看0通道
}
// Sets the channel on which histogram will be calculated.
// By default it is channel 0.设置通道的方法
void setChannel(int c) {
channels[0]= c;
}
// Gets the channel used.获取通道的方法
int getChannel() {
return channels[0];
}
// Sets the range for the pixel values.设置直方图值的范围
// By default it is [0,256]
void setRange(float minValue, float maxValue) {
hranges[0]= minValue;
hranges[1]= maxValue;
}
// Gets the min pixel value.
float getMinValue() {
return hranges[0];
}
// Gets the max pixel value.
float getMaxValue() {
return hranges[1];
}
// Sets the number of bins in histogram.设置直方图箱子数(统计多少个灰度级)
// By default it is 256.构造函数中默认设置为256
void setNBins(int nbins) {
histSize[0]= nbins;
}
// Gets the number of bins in histogram.
int getNBins() {
return histSize[0];
}
// Computes the 1D histogram.自编函数计算1维直方图
cv::Mat getHistogram(const cv::Mat &image) {//输入图像image
cv::Mat hist;
// Compute histogram
cv::calcHist(&image,
1, // histogram of 1 image only
channels, // the channel used
cv::Mat(), // no mask is used,不使用掩码
hist, // the resulting histogram
1, // it is a 1D histogram
histSize, // number of bins
ranges // pixel value range
);
return hist;
}
// Computes the 1D histogram and returns an image of it.直方图图像
cv::Mat getHistogramImage(const cv::Mat &image, int zoom = 1){
// Compute histogram first
cv::Mat hist = getHistogram(image);
// Creates image
return Histogram1D::getImageOfHistogram(hist, zoom);
}
// Stretches the source image using min number of count in bins.
cv::Mat stretch(const cv::Mat &image, int minValue = 0) {
// Compute histogram first
cv::Mat hist = getHistogram(image);
// find left extremity of the histogram
int imin = 0;
for (; imin < histSize[0]; imin++) {
// ignore bins with less than minValue entries
if (hist.at<float>(imin) > minValue)
break;
}
// find right extremity of the histogram
int imax = histSize[0] - 1;
for (; imax >= 0; imax--) {
// ignore bins with less than minValue entries
if (hist.at<float>(imax) > minValue)
break;
}
// Create lookup table
int dims[1] = { 256 };
cv::Mat lookup(1, dims, CV_8U);
for (int i = 0; i<256; i++) {
if (i < imin) lookup.at<uchar>(i) = 0;
else if (i > imax) lookup.at<uchar>(i) = 255;
else lookup.at<uchar>(i) = cvRound(255.0*(i - imin) / (imax - imin));
}
// Apply lookup table
cv::Mat result;
result = applyLookUp(image, lookup);
return result;
}
// Stretches the source image using percentile.
cv::Mat stretch(const cv::Mat &image, float percentile) {
// number of pixels in percentile
float number= image.total()*percentile;
// Compute histogram first
cv::Mat hist = getHistogram(image);
// find left extremity of the histogram
int imin = 0;
for (float count=0.0; imin < histSize[0]; imin++) {
// number of pixel at imin and below must be > number
if ((count+=hist.at<float>(imin)) >= number)
break;
}
// find right extremity of the histogram
int imax = histSize[0] - 1;
for (float count=0.0; imax >= 0; imax--) {
// number of pixel at imax and below must be > number
if ((count += hist.at<float>(imax)) >= number)
break;
}
// Create lookup table
int dims[1] = { 256 };
cv::Mat lookup(1, dims, CV_8U);
for (int i = 0; i<256; i++) {
if (i < imin) lookup.at<uchar>(i) = 0;
else if (i > imax) lookup.at<uchar>(i) = 255;
else lookup.at<uchar>(i) = cvRound(255.0*(i - imin) / (imax - imin));
}
// Apply lookup table
cv::Mat result;
result = applyLookUp(image, lookup);
return result;
}
// static methods
// Create an image representing a histogram
static cv::Mat getImageOfHistogram(const cv::Mat &hist, int zoom) {
// Get min and max bin values
double maxVal = 0;
double minVal = 0;
cv::minMaxLoc(hist, &minVal, &maxVal, 0, 0);
// get histogram size
int histSize = hist.rows;
// Square image on which to display histogram
cv::Mat histImg(histSize*zoom, histSize*zoom, CV_8U, cv::Scalar(255));
// set highest point at 90% of nbins (i.e. image height)
int hpt = static_cast<int>(0.9*histSize);
// Draw vertical line for each bin
for (int h = 0; h < histSize; h++) {
float binVal = hist.at<float>(h);
if (binVal>0) {
int intensity = static_cast<int>(binVal*hpt / maxVal);
cv::line(histImg, cv::Point(h*zoom, histSize*zoom),
cv::Point(h*zoom, (histSize - intensity)*zoom), cv::Scalar(0), zoom);
}
}
return histImg;
}
// Equalizes the source image.
static cv::Mat equalize(const cv::Mat &image) {
cv::Mat result;
cv::equalizeHist(image,result);
return result;
}
// Applies a lookup table transforming an input image into a 1-channel image
static cv::Mat applyLookUp(const cv::Mat& image, // input image
const cv::Mat& lookup) { // 1x256 uchar matrix
// the output image
cv::Mat result;
// apply lookup table
cv::LUT(image,lookup,result);
return result;
}
};
#endif
(2)3维彩色直方图操作方法
头文件ColorHistogram.h中定义了操作彩色直方图的方法类class ColorHistogram。colorhistogram.h代码如下:
#if !defined COLHISTOGRAM
#define COLHISTOGRAM
#include <opencv2\core\core.hpp>
#include <opencv2\imgproc\imgproc.hpp>
class ColorHistogram {
private:
int histSize[3]; // size of each dimension
float hranges[2]; // range of values
const float* ranges[3]; // array of ranges for each dimension
int channels[3]; // channel to be considered
public:
ColorHistogram() {
// Prepare default arguments for a color histogram
// each dimension has equal size and range
histSize[0]= histSize[1]= histSize[2]= 256;
hranges[0]= 0.0; // BRG range from 0 to 256
hranges[1]= 256.0;
ranges[0]= hranges; // in this class,
ranges[1]= hranges; // all channels have the same range
ranges[2]= hranges;
channels[0]= 0; // the three channels
channels[1]= 1;
channels[2]= 2;
}
// set histogram size for each dimension
void setSize(int size) {
// each dimension has equal size
histSize[0]= histSize[1]= histSize[2]= size;
}
// Computes the histogram.
cv::Mat getHistogram(const cv::Mat &image) {
cv::Mat hist;
// BGR color histogram
hranges[0]= 0.0; // BRG range
hranges[1]= 256.0;
channels[0]= 0; // the three channels
channels[1]= 1;
channels[2]= 2;
// Compute histogram
cv::calcHist(&image,
1, // histogram of 1 image only
channels, // the channel used
cv::Mat(), // no mask is used
hist, // the resulting histogram
3, // it is a 3D histogram
histSize, // number of bins
ranges // pixel value range
);
return hist;
}
// Computes the histogram.
cv::SparseMat getSparseHistogram(const cv::Mat &image) {
cv::SparseMat hist(3, // number of dimensions
histSize, // size of each dimension
CV_32F);
// BGR color histogram
hranges[0]= 0.0; // BRG range
hranges[1]= 256.0;
channels[0]= 0; // the three channels
channels[1]= 1;
channels[2]= 2;
// Compute histogram
cv::calcHist(&image,
1, // histogram of 1 image only
channels, // the channel used
cv::Mat(), // no mask is used
hist, // the resulting histogram
3, // it is a 3D histogram
histSize, // number of bins
ranges // pixel value range
);
return hist;
}
// Computes the 1D Hue histogram with a mask.
// BGR source image is converted to HSV
// Pixels with low saturation are ignored
cv::Mat getHueHistogram(const cv::Mat &image,
int minSaturation=0) {
cv::Mat hist;
// Convert to HSV colour space
cv::Mat hsv;
cv::cvtColor(image, hsv, CV_BGR2HSV);
// Mask to be used (or not)
cv::Mat mask;
if (minSaturation>0) {
// Spliting the 3 channels into 3 images
std::vector<cv::Mat> v;
cv::split(hsv,v);
// Mask out the low saturated pixels
cv::threshold(v[1],mask,minSaturation,255,
cv::THRESH_BINARY);
}
// Prepare arguments for a 1D hue histogram
hranges[0]= 0.0; // range is from 0 to 180
hranges[1]= 180.0;
channels[0]= 0; // the hue channel
// Compute histogram
cv::calcHist(&hsv,
1, // histogram of 1 image only
channels, // the channel used
mask, // binary mask
hist, // the resulting histogram
1, // it is a 1D histogram
histSize, // number of bins
ranges // pixel value range
);
return hist;
}
// Computes the 2D ab histogram.
// BGR source image is converted to Lab
cv::Mat getabHistogram(const cv::Mat &image) {
cv::Mat hist;
// Convert to Lab color space
cv::Mat lab;
cv::cvtColor(image, lab, CV_BGR2Lab);
// Prepare arguments for a 2D color histogram
hranges[0]= 0;
hranges[1]= 256.0;
channels[0]= 1; // the two channels used are ab
channels[1]= 2;
// Compute histogram
cv::calcHist(&lab,
1, // histogram of 1 image only
channels, // the channel used
cv::Mat(), // no mask is used
hist, // the resulting histogram
2, // it is a 2D histogram
histSize, // number of bins
ranges // pixel value range
);
return hist;
}
};
#endif
2.计算反向投影直方图的方法
计算反向投影直方图的过程:
- 从ROI区域的归一化的直方图中读取概率值
- 把输入图像(代检测图)中的每一个像素替换成与之对应的归一化中方图中的概率值
- 把替换成概率值(0~1)的像素值再从0~1映射到0~255
- 灰度值越大的像素越有可能是ROI的成分。
本例中,将反向投影直方图封装成一个类ContentFinder,contentfinder.h代码如下:
#if !defined OFINDER
#define OFINDER
#include <opencv2\core\core.hpp>
#include <opencv2\imgproc\imgproc.hpp>
class ContentFinder {
private:
// histogram parameters
float hranges[2];
const float* ranges[3];
int channels[3];
float threshold; // decision threshold
cv::Mat histogram; // histogram can be sparse 输入直方图
cv::SparseMat shistogram; // or not
bool isSparse;
public:
ContentFinder() : threshold(0.1f), isSparse(false) {
// in this class,
// all channels have the same range
ranges[0]= hranges;
ranges[1]= hranges;
ranges[2]= hranges;
}
// Sets the threshold on histogram values [0,1]
void setThreshold(float t) {
threshold= t;
}
// Gets the threshold
float getThreshold() {
return threshold;
}
// Sets the reference histogram
void setHistogram(const cv::Mat& h) {
isSparse= false;
cv::normalize(h,histogram,1.0);
}
// Sets the reference histogram
void setHistogram(const cv::SparseMat& h) {
isSparse= true;
cv::normalize(h,shistogram,1.0,cv::NORM_L2);
}
// All channels used, with range [0,256]
cv::Mat find(const cv::Mat& image) {
cv::Mat result;
hranges[0]= 0.0; // default range [0,256]
hranges[1]= 256.0;
channels[0]= 0; // the three channels
channels[1]= 1;
channels[2]= 2;
return find(image, hranges[0], hranges[1], channels);
}
// Finds the pixels belonging to the histogram
cv::Mat find(const cv::Mat& image, float minValue, float maxValue, int *channels) {
cv::Mat result;
hranges[0]= minValue;
hranges[1]= maxValue;
if (isSparse) { // call the right function based on histogram type
for (int i=0; i<shistogram.dims(); i++)
this->channels[i]= channels[i];
cv::calcBackProject(&image,
1, // we only use one image at a time
channels, // vector specifying what histogram dimensions belong to what image channels
shistogram, // the histogram we are using
result, // the resulting back projection image
ranges, // the range of values, for each dimension
255.0 // the scaling factor is chosen such that a histogram value of 1 maps to 255
);
} else {
for (int i=0; i<histogram.dims; i++)
this->channels[i]= channels[i];
//某对象的this指针,指向被调用函数所在的对象,此处对象为ContentFinder类
//this->channels[i]即ContentFinder类的私有成员channels[3]
//对ContentFinder类各成员的访问均通过this进行
cv::calcBackProject(&image,
1, // we only use one image at a time
channels, // 向量表示哪个直方图维度属于哪个图像通道
histogram, // 用到的直方图
result, // 反向投影的图像
ranges, // 每个维度值的范围
255.0 // 选用的换算系数
);
}
// Threshold back projection to obtain a binary image阈值分割反向投影图像得到二值图
if (threshold>0.0)// 设置的阈值>0时,才进行阈值分割
cv::threshold(result, result, 255.0*threshold, 255.0, cv::THRESH_BINARY);
return result;
}
};
#endif
3.提取感兴趣区域ROI的直方图
以上定义了直方图操作方法和反向投影直方图检测方法。下面将在main函数中调用上述方法来做反向投影直方图检测的实验。
要查找图像中特定的内容(例如在下图中检测出天空中的云彩),首先要选择一个包括所需样本的兴趣区域,即画一个矩形框选出ROI。
(1)读取图像
补充:imread(const string& filename, int flags=1)函数读取图像色彩空间参数flags:
enum
{
// 8bit, color or not
IMREAD_UNCHANGED =-1,
// 8bit, gray
IMREAD_GRAYSCALE =0,
// color
IMREAD_COLOR =1,
// any depth,
IMREAD_ANYDEPTH =2,
// any color
IMREAD_ANYCOLOR =4
};
在main函数中运行程序主干。以灰度图的形式读取图像。
// Read input image
cv::Mat image= cv::imread("f:\\images\\waves.jpg",0);// /灰度图方式读取图像
if (!image.data)
return 0;
(2)设置ROI
设置读取图像中的云层区域为ROI。
// define image ROI cv::Mat imageROI; imageROI= image(cv::Rect(406,146,30,24)); // Cloud region

(3)获取ROI的直方图
调用Histogram1D类中的.getHistogram( )方法获取ROI的1维直方图
// Find histogram of reference
Histogram1D h;
cv::Mat hist= h.getHistogram(imageROI);
cv::namedWindow("Reference Hist");
cv::imshow("Reference Hist",h.getHistogramImage(imageROI));
waitKey(0);
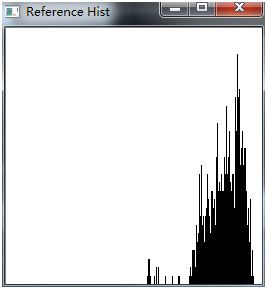
ROI区域直方图
(5)归一化ROI区域直方图
通过归一化直方图得到一个函数,该函数为特定强度的像素属于这个区域的概率:
cv::normalize(histogram,histogram,1.0);
实际上,归一化在反向计算投影类ContentFinder中进行,此处单独说明一下。归一化直方图后,直方图每个bin位置的值之和为1。因此,可以将直方图在灰度级n位置的值视为灰度级为n的像素属于此ROI区域的概率。例如,假设下图为某一区域的归一化的直方图,当进行直方图反向投影时,如果图像中有一个像素灰度值为31,那么这个像素是该感兴趣区域的概率为0.1;如果图像中有一个像素灰度值为33,那么这个像素是该感兴趣区域的概率为0.5;如果图像中有像素灰度值为31~34以外的值,那么这些像素是该感兴趣区域的概率为0,因为该ROI区域的归一化直方图只在31~34位置有不为0的值。
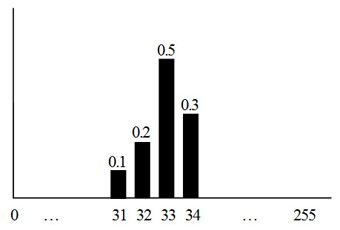
归一化直方图示例
4.调用反向投影直方图检测灰度图像
前文定义了1维直方图的操作方法Histogram1D类,定义了计算反向投影直方图的方法ContentFinder类,在main函数中读取了图像、设置好ROI,获取了ROI直方图后,就可以调用ContentFinder类来计算反向投影了。
注意为了能将处理过程的中间结果显示出来,设置阈值为-0.1<0,用ContentFinder类在find()方法中当设置的阈值<0时不进行阈值分割,因此输出的结果为灰度图像,便于显示观察。下面的代码先使用find()获取反向投影结果result1,然后使用result1.convertTo(tmp,CV_8U,-1.0,255.0);将result1转换为反向投影图像tmp。
// Create the content finder
ContentFinder finder;
// set histogram to be back-projected
finder.setHistogram(hist);//将ROI直方图hist传入反向投影计算类ContentFinder finder
finder.setThreshold(-1.0f);// /设置阈值为-0.1,float型。阈值<0,不使用find方法中的阈值分割,输出result为灰度图
// Get back-projection
cv::Mat result1;
result1= finder.find(image);
// Create negative image and display result
cv::Mat tmp;
result1.convertTo(tmp,CV_8U,-1.0,255.0);
cv::namedWindow("Backprojection result");
cv::imshow("Backprojection result",tmp);
为了搞清楚convertTo()的操作,我们用如下代码扫描图像像素的方法读取result1中一个15×15矩形区域的值在屏幕上输出:
if(1)//for debug
{
cv::namedWindow("Backprojection result1");
cv::imshow("Backprojection result1",result1);
cout<<"pixel vaule of result1(421,141)~(436,156),15x15 region"<<endl<<endl;
for ( int j = 140;j<155;j++)//从第j=101行开始
{
uchar* data= result1.ptr<uchar>(j);
for (int i=420;i<435;i++)
{
cout<<(int)data[i]<<" ";//打印输出第j行的所有数据
}
cout<<endl;//输出1行后换行
}
}result1图像该区域的像素值输出结果如下图所示
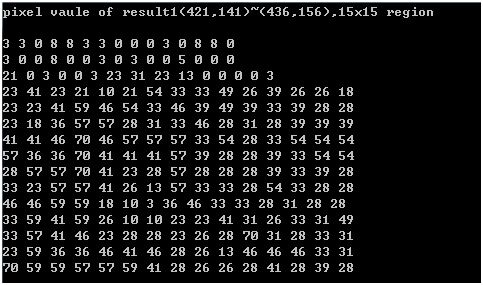
图像result1从点(421,141)到点(436,156)的矩形区域的像素值
使用使用上述方法输出tmp图像同样位置的15×15矩形区域的像素值如下图所示。比较转换前后的图像,发现对源图中的像素逐点I(x,y)做了反向操作I(x,y)=255-I(x,y).
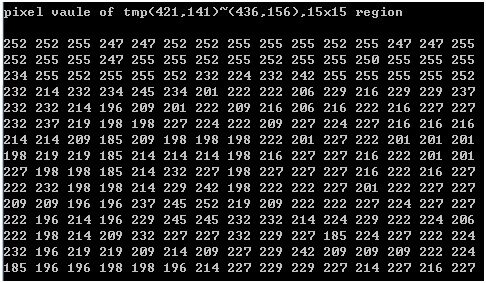
图像tmp从点(421,141)到点(436,156)的矩形区域的像素值
显示出反向前后的全图如下2图所示。
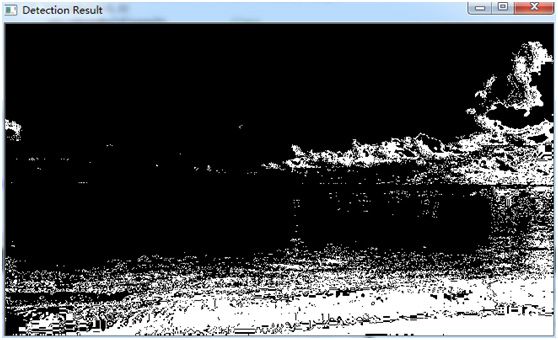
阈值分割后的反向投影检测结果
5.调用反向投影直方图检测彩色图像
从上图检测结果中可以看到,本来是检测云彩区域,但得到的检测结果还包括了底部许多沙滩区域和部分海水区域。一个改进的方法就是使用彩色图像的直方图来进行反向投影检测。使用彩色信息检测需要用到前面提到的3维彩色直方图操作ColorHistogram类。在main函数中通过如下代码来进行彩色图像的反向投影直方图检测。
// Load color image
ColorHistogram hc; //声明一个彩色直方图类hc用于下面获取ROI直方图的操作
cv::Mat color= cv::imread("f:\\images\\waves.jpg");//这里要使用本机的图像路径
// extract region of interest
imageROI= color(cv::Rect(406,154,30,24)); //设置检测云彩区域
// Get 3D colour histogram (8 bins per channel)
hc.setSize(8); // 8x8x8 降低bin的数量使用8,16,64分别计算,结果如下图所示。
cv::Mat shist= hc.getHistogram(imageROI);
// set histogram to be back-projected
finder.setHistogram(shist);
finder.setThreshold(0.05f);
// Get back-projection of color histogram
result1= finder.find(color);
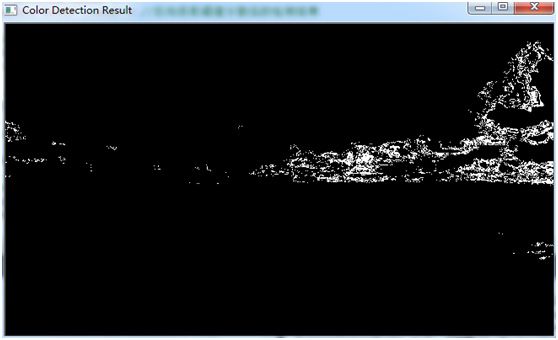
cv::namedWindow("Color Detection Result");
cv::imshow("Color Detection Result",result1);
下图是输入的彩色图像与ROI检测区域
彩色图像与选择的ROI区域
在程序中,可以通过hc.setSize()来设置直方图中每个通道bin个数,本实验中,选择了8/16/64三个参数,检测结果如下图所示。从检测结果可以看出来,使用彩色直方图后,检测效果大大优于灰度直方图,并且连水中云的倒影都能检测出来。而设置的bin个数越多,检测精度越高。并且本例中使用16个bin得到的检测结果优于8和64个bin,因为精度过高将排除掉部分与ROI区域类似的云彩区域,所以bin不是越多越好,合适的bin的个数需要根据实际情况而定。

彩色图检测结果(8个bin,出现了少部分沙滩)
彩色图检测结果(16个bin,基本检测出了全部的云彩)
彩色图检测结果(64个bin,有部分云彩漏检)
计算稀疏直方图可以减少内存使用量。可以使用cv::SparseMat重做本实验。
如果将RGB色彩空间转换为Lab色彩空间或HSV色彩空间。如果寻找色彩鲜艳的物体,使用HSV色彩空间的色调通道可能会更有效。在其他情况下,最好使用感知上均匀的Lab色彩空间的色度组件。色彩空间转换代码如下:
// Convert to Lab space cv::Mat lab; cv::cvtColor(color, lab, CV_BGR2Lab); // Convert to HSV space cv::Mat hsv; cv::cvtColor(color, hsv, CV_BGR2HSV);
检测结果如下图所示。
LAB彩色模式检测结果(8个bin)
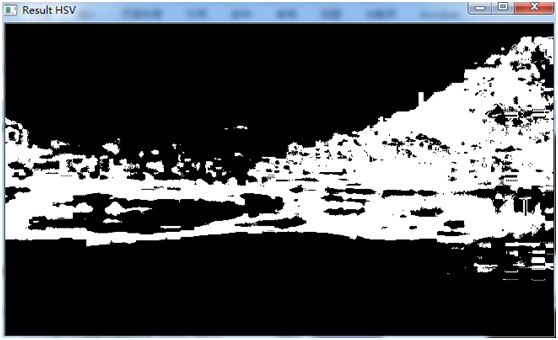
HSV彩色模式检测结果(8个bin)