ioctl---字符设备的控制技术
字符设备的控制
1. 字符设备控制理论
1.1 作用
大部分驱动程序除了需要提供读写设备的能力外,还需要具备控制设备的能力。比如:改变波特率
1.2 应用程序接口
在用户空间,使用ioctl系统调用来控制设备,原型如下:
int ioctl(int fd, unsigned long cmd, ...)
fd: 要控制的设备文件描述符
cmd: 发送给设备的控制命令
...: 第三个参数是可选的参数,存在与否依赖于控制命令(第二个参数)
1.3 设备驱动方法

2. 字符设备控制实现
2.1 定义命令
命令其实质而言就是一个整数,但为了让这个整数具备更好的可读性,我们通常会把这个整数分为几个段,类 型(8位),序号, 参数传送方向,参数长度
type(类型/幻数):表明这是属于哪个设备的命令
number(序号):用来区分同一设备的不同命令
direction: 参数传送的方向,可能的值是_IOC_NONE(没有数据传输),_IOC_READ, _IOC_WRITE(向设备读写 参数)
size : 参数长度
Linux系统提供了下面的宏来帮助定义命令:
* _IO(type, nr) : 不带参数的命令
*_IOR(type, nr, datatype) : 从设备中读取参数的命令
*_IOW(type, nr, datatype) : 向设备写入参数的命令
例如:
#define MEM_MAGIC 'm' //定义幻数
#define MEM_SET _IOW(MEM_MAGIC, 0, int)
2.2 实现设备方法
unlocked_ioctl函数的实现通常是根据命令执行的一个switch语句。但是,当命令号不能匹配任何一个设备所支 持的命令时, 返回 -EINVAL
编程模型:
switch cmd:
case 命令A:
//执行A所对应的操作
case 命令B:
//执行B对应的操作
defaule:
return -EINVAL;
实例代码分析来实现ioctl:
这里的memdev.c还是接着上篇的基础上改的
#include <linux/module.h>
#include <linux/types.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/init.h>
#include <linux/cdev.h>
#include <asm/uaccess.h>
#include <linux/slab.h>
#include "memdev.h"
int dev1_registers[5];
int dev2_registers[5];
struct cdev cdev;
dev_t devno;
/*文件打开函数*/
int mem_open(struct inode *inode, struct file *filp)
{
/*获取次设备号*/
int num = MINOR(inode->i_rdev);
if (num==0)
filp->private_data = dev1_registers;
else if(num == 1)
filp->private_data = dev2_registers;
else
return -ENODEV; //无效的次设备号
return 0;
}
/*文件释放函数*/
int mem_release(struct inode *inode, struct file *filp)
{
return 0;
}
/*读函数*/
static ssize_t mem_read(struct file *filp, char __user *buf, size_t size, loff_t *ppos)
{
unsigned long p = *ppos;
unsigned int count = size;
int ret = 0;
int *register_addr = filp->private_data; /*获取设备的寄存器基地址*/
/*判断读位置是否有效*/
if (p >= 5*sizeof(int))
return 0;
if (count > 5*sizeof(int) - p)
count = 5*sizeof(int) - p;
/*读数据到用户空间*/
if (copy_to_user(buf, register_addr+p, count))
{
ret = -EFAULT;
}
else
{
*ppos += count;
ret = count;
}
return ret;
}
/*写函数*/
static ssize_t mem_write(struct file *filp, const char __user *buf, size_t size, loff_t *ppos)
{
unsigned long p = *ppos;
unsigned int count = size;
int ret = 0;
int *register_addr = filp->private_data; /*获取设备的寄存器地址*/
/*分析和获取有效的写长度*/
if (p >= 5*sizeof(int))
return 0;
if (count > 5*sizeof(int) - p)
count = 5*sizeof(int) - p;
/*从用户空间写入数据*/
if (copy_from_user(register_addr + p, buf, count))
ret = -EFAULT;
else
{
*ppos += count;
ret = count;
}
return ret;
}
/* seek文件定位函数 */
static loff_t mem_llseek(struct file *filp, loff_t offset, int whence)
{
loff_t newpos;
switch(whence) {
case SEEK_SET:
newpos = offset;
break;
case SEEK_CUR:
newpos = filp->f_pos + offset;
break;
case SEEK_END:
newpos = 5*sizeof(int)-1 + offset;
break;
default:
return -EINVAL;
}
if ((newpos<0) || (newpos>5*sizeof(int)))
return -EINVAL;
filp->f_pos = newpos;
return newpos;
}
<span style="color:#ff0000;">//设备控制函数
long mem_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
switch(cmd)
{
case MEM_RESTART: //假如这里传入的是重启的命令
printk(KERN_WARNING"restart device!\n");//这里通过虚拟设备来模拟
return 0;
case MEM_SET: //如果传入的是设置参数命令
printk(KERN_WARNING"arg is : %d\n", arg);//打印出传入的参数
return 0;
default:
return -EINVAL;//其他的打印错误
}
return 0;
}</span>
/*文件操作结构体*/
static const struct file_operations mem_fops =
{
.llseek = mem_llseek,
.read = mem_read,
.write = mem_write,
.open = mem_open,
.release = mem_release,
<span style="color:#ff0000;">.unlocked_ioctl = mem_ioctl,</span>
};
/*设备驱动模块加载函数*/
static int memdev_init(void)
{
/*初始化cdev结构*/
cdev_init(&cdev, &mem_fops);
/* 注册字符设备 */
alloc_chrdev_region(&devno, 0, 2, "memdev");
cdev_add(&cdev, devno, 2);
//printk(KERN_WARNING"Hello Memdev!\n");
printk("Hello Memdev!\n");
}
/*模块卸载函数*/
static void memdev_exit(void)
{
cdev_del(&cdev); /*注销设备*/
unregister_chrdev_region(devno, 2); /*释放设备号*/
printk(KERN_WARNING"exit Memdev!\n");
}
MODULE_LICENSE("GPL");
module_init(memdev_init);
module_exit(memdev_exit);
memdev.h
#define MEM_MAGIC 'm' //定义一个幻数,而长度正好和ASC码长度一样为8位,所以这里定义个字符 #define MEM_RESTART _IO(MEM_MAGIC, 0) //第一个命令是重启的命令,重启的命令不带参数 第一命令这里序号定义成0 #define MEM_SET _IOW(MEM_MAGIC, 1, int) //设置参数命令 序号为1, 类型为int
#include<sys/types.h>
#include<sys/stat.h>
#include<fcntl.h>
#include<sys/ioctl.h>
#include "memdev.h"
int main()
{
int fd;
fd = open("/dev/memdev0", O_RDWR);//可读可写打开文件
ioctl(fd, MEM_SET, 115200);//第一个参数fd,第二个是我们要发送的命令,第三个是要传入的参数
ioctl(fd, MEM_RESTART);//重启
close(fd);
}
Makefile
obj-m := memdev.o KDIR := /home/kernel/linux-ok6410 all: make -C $(KDIR) M=$(PWD) modules CROSS_COMPILE=arm-linux- ARCH=arm clean: rm -f *.ko *.o *.mod.o *.mod.c *.symvers *.bak *.order
这里ioctl函数原型可以查看内核源码Fs.h(/include/linux目录下)文件
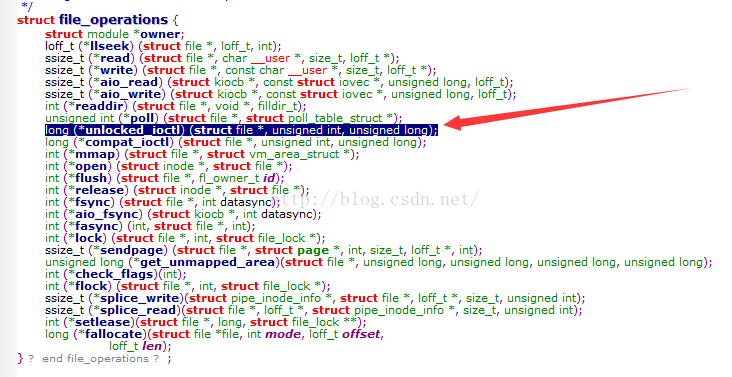

然后这次采用静态编译mem_ctl.c文件 arm-linux-gcc -static -o memctl (这里采用静态编译上面博文有说道)
由于挂载了整个rootfs目录,这里编译产生的文件会同步到我的开发板
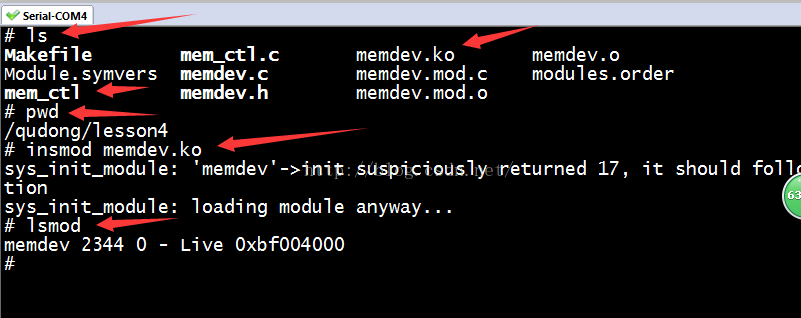
安装设备驱动模块,然后cat /proc/device 查看设备驱动程序的主设备号

然后创建设备文件,这样我们的应用程序就可以通过这个设备文件来访问设备了(当然这里我们的设备是虚拟出来的字符设备,不过麻雀虽小五脏俱全)
mknod memdev0 c 252 0 (执行该命令)
memdevo是我们给字符设备取的名字, 252是该字符设备的设备号,

这里可以看到/dev目录下就会产生memdev0这个设备文件了,运行mem_clt应用程序

至此ioctl字符设备的控制就OVER了!