基于MFC和OpenCV的图像处理小软件
1.软件界面:

本程序是基于MFC的单文档(SDI)程序,每次可以打开耽搁图片文件,可以保存,另存为图片文件。支持打开jpg,png,ico,bmp,jpeg等格式的图片。图片打开后的界面如下:

2.图片缩放:
通过滚动鼠标滚轮,可以调节图像的大小。默认是向上滚动鼠标滚轮为放大图片,向下滚动鼠标滚轮为缩小图片。当图片放大或者缩小到一定程度后在滑动鼠标滚轮会没有任何变化,因为图片过大的话会造成内存溢出,也就是不可能无限制的放大。下面是放大和缩小后的图片截图:


3.彩色图片灰度化
点击图像处理菜单按钮,会出现下拉菜单->灰度化,->二值化。其中点击灰度化按钮可以对打开的彩色图像进行灰度化(如果打开的是灰度图像或者二值化后的图像,则不处理) 。下图是点击“灰度化“选项之后的截图:

也可以对灰度化后的图像进行缩放、保存或者另存为。
4.OTSU二值化
本程序利用OTSU算法对图像进行二值化,点击“图像处理”菜单下的“二值化”选项,可以对打开的彩色(或灰度)图像二值化。其中二值化阈值设置对话框如下:
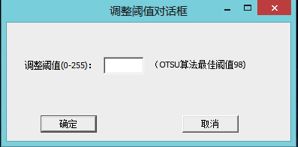
可以手动调整阈值,也可以直接利用OTSU算法计算出的阈值。比如本次打开的图像的OSTU算法计算出的最佳阈值是98,一般阈值在0-255之间。点击“确定”按钮,程序会自动调用手动调整的阈值,点击“取消”按钮,程序会自动用最佳阈值处理图像。
最佳阈值(本次打开的图像时98)处理的结果截图:

手动设置阈值150(也可以是其他值)后的结果:
技术要点部分:
1.打开图像
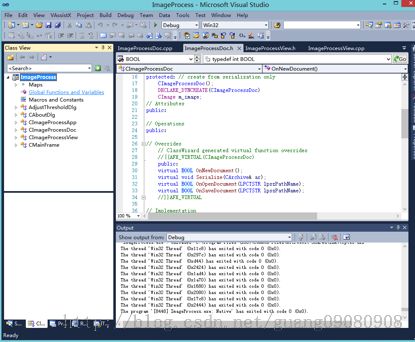
首先,通过MFC向导生成SDI程序模板,如下图:
在CImageProcessDoc.cpp中添加打开图像的部分代码,如下:
BOOLCImageProcessDoc::OnOpenDocument(LPCTSTR lpszPathName)
{
if(!CDocument::OnOpenDocument(lpszPathName))
return FALSE;
// TODO: Add your specialized creation codehere
m_image.Load(lpszPathName);
return TRUE;
}
保存图像的代码如下:
BOOLCImageProcessDoc::OnSaveDocument(LPCTSTR lpszPathName)
{
// TODO: Add your specialized code hereand/or call the base class
m_image.Save(lpszPathName);
return true;
}
2.图像的缩放
图像的缩放其实是吐过控制视图显示的比例来进项缩放的,首先利用应用程序向导添加鼠标滚轮的消息响应事件:
BOOL CImageProcessView::OnMouseWheel(UINTnFlags, short zDelta, CPoint pt)
{
//TODO: Add your message handler code here and/or call default
if(zDelta> 0) //鼠标向上滚轮,放大图像
{
if((scale+ 0.05)<4)
scale+= 0.05;//每次增加0.05倍
}elseif(zDelta<0)//鼠标向下滚轮,缩小图像
{
if((scale- 0.05)>0)
scale -= 0.05;//每次减少0.05倍
}else{
returnCView::OnMouseWheel(nFlags, zDelta, pt);
}
Invalidate();
returnCView::OnMouseWheel(nFlags, zDelta, pt);
}
3.图像的二值化
图像的二值化主要是用到了opencv里面的cvCvtColor函数,可以很方便的对彩色图像进行二值化,需要在CImageProcessDoc类中利用应用程序向导添加如下函数:
voidCImageProcessDoc::OnImageprocessingGray()
{
// TODO: Add your command handler code here
IplImage* img;
img=m_image.GetImage();
IplImage* imgray =cvCreateImage(cvGetSize(img), 8, 1);
cvCvtColor(img, imgray, CV_RGB2GRAY); //彩色图像灰度化
m_image.CopyOf(imgray, 1);
UpdateAllViews(NULL);
}
4.图像的二值化
OTSU算法原理:1. OTSU算法原理简介
对于一幅图像,设当前景与背景的分割阈值为t时,前景点占图像比例为w0,均值为u0,背景点占图像比例为w1,均值为u1。则整个图像的均值为u = w0*u0+w1*u1。建立目标函数g(t)=w0*(u0-u)^2+w1*(u1-u)^2,g(t)就是当分割阈值为t时的类间方差表达式。OTSU算法使得g(t)取得全局最大值,当g(t)为最大时所对应的t称为最佳阈值。OTSU算法又称为最大类间方差法。
实现二值化需要在CImageProcessDoc中添加以下两个功能函数(OtsuThreshold(IplImage *image)
和OnImageprocessingThreshold()):
intCImageProcessDoc::OtsuThreshold(IplImage *image)
{
assert(NULL != image);
int width = image->width;
int height = image->height;
int x=0,y=0;
int pixelCount[256];
float pixelPro[256];
int i, j, pixelSum = width * height,threshold = 0;
uchar* data = (uchar*)image->imageData;
//初始化
for(i = 0; i < 256; i++)
{
pixelCount[i] = 0;
pixelPro[i] = 0;
}
//统计灰度级中每个像素在整幅图像中的个数
for(i = y; i < height; i++)
{
for(j = x;j <width;j++)
{
pixelCount[data[i *image->widthStep + j]]++;
}
}
//计算每个像素在整幅图像中的比例
for(i = 0; i < 256; i++)
{
pixelPro[i] = (float)(pixelCount[i]) /(float)(pixelSum);
}
//经典ostu算法,得到前景和背景的分割
//遍历灰度级[0,255],计算出方差最大的灰度值,为最佳阈值
float w0, w1, u0tmp, u1tmp, u0, u1,u,deltaTmp, deltaMax = 0;
for(i = 0; i < 256; i++)
{
w0 = w1 = u0tmp = u1tmp = u0 = u1 = u =deltaTmp = 0;
for(j = 0; j < 256; j++)
{
if(j <= i) //背景部分
{
//以i为阈值分类,第一类总的概率
w0 += pixelPro[j];
u0tmp += j * pixelPro[j];
}
else //前景部分
{
//以i为阈值分类,第二类总的概率
w1 += pixelPro[j];
u1tmp += j * pixelPro[j];
}
}
u0 = u0tmp / w0; //第一类的平均灰度
u1 = u1tmp / w1; //第二类的平均灰度
u = u0tmp + u1tmp; //整幅图像的平均灰度
//计算类间方差
deltaTmp = w0 * (u0 - u)*(u0 - u) + w1 *(u1 - u)*(u1 - u);
//找出最大类间方差以及对应的阈值
if(deltaTmp > deltaMax)
{
deltaMax = deltaTmp;
threshold = i;
}
}
//返回最佳阈值;
return threshold;
}
//-----------------------------------------------------------------------
voidCImageProcessDoc::OnImageprocessingThreshold()
{
// TODO: Add your command handler code here
IplImage* img;
img=m_image.GetImage();//由CImage类 返回一个IplImage* 指针,因为:IplImage*GetImage() { return m_img; };
IplImage* imgray =cvCreateImage(cvGetSize(img), 8, 1);
cvCvtColor(img, imgray, CV_RGB2GRAY);
IplImage* biImage =cvCreateImage(cvGetSize(imgray),8,1);
//计算最佳阈值
threshold = OtsuThreshold(imgray);
AdjustThresholdDlg at;
at.DoModal();
//对图像二值化
cvThreshold(imgray,biImage,threshold,255,CV_THRESH_BINARY);
m_image.CopyOf(biImage, 1);
UpdateAllViews(NULL);
}
PS:
Opencv1.0在VS2010中的配置:
参考如下网址:http://www.cnblogs.com/etsang/p/3165184.html。