Android+OpenCV实现轨迹识别
最近在帮朋友搞一个APP,实现:在屏幕上画一条轨迹,然后将各个坐标通过蓝牙发送到下位机。当然,这个坐标是有顺序的,难点也在这里。
方法一:抓取屏幕点,并实时发送到下位机(已实现)。
public boolean onTouchEvent(MotionEvent event)
{
// 获取触点位置
float x = event.getX();
float y = event.getY();
<span style="white-space:pre"> </span>point[0]=x;
<span style="white-space:pre"> </span>point[1]=y;
...
...
}
当然了,在这个类里面得定义为public static 变量:
<pre name="code" class="java">public static float[] point=new float[2];在Client里面,我们开启一个发送数据线程:
DeliveryThread = new Thread(this);// 连接上了就开始传输吧 DeliveryThread.start();重写Runnable接口:
@Override
public void run() {
// TODO Auto-generated method stub
while (true) {
try {
float[] p = DrawView.point;
byte[] buf0 = intToByteArray((int) p[0]);
byte[] buf1 = intToByteArray((int) p[1]);
byte[] buf = new byte[8];
for (int i = 0; i < 3; i++) {
buf[i] = buf0[i];
}
for (int i = 0; i < 3; i++) {
buf[i + 4] = buf1[i];
}
Log.i("tag", ".." + buf.length + " " + buf[0] + " " + buf[1]
+ " " + buf[2] + " " + buf[3] + " " + buf[4] + " "
+ buf[5] + " " + buf[6] + " " + buf[7]);
mOutStream.write(buf, 0, 8);
} catch (IOException e) {
Log.e("tag", "传输错误!");
break;
}
try {
Thread.sleep(100);//100ms一次
} catch (InterruptedException e1) {
break;
}
}
}这里我们要注意:point数组是float型,首先,我们需强制转换为int型(应该问题不大吧),之后,将int转byte,一个int对应四个byte。一次发一个坐标,两个int,对应8个byte。
public byte[] intToByteArray(int i) {
byte[] result = new byte[4];
// 由高位到低位
result[0] = (byte) ((i >> 24) & 0xFF);
result[1] = (byte) ((i >> 16) & 0xFF);
result[2] = (byte) ((i >> 8) & 0xFF);
result[3] = (byte) (i & 0xFF);
return result;
}
方法二:等画完轨迹之后,对轨迹进行解析,找到关键点并向下位机发送多项式系数(发现不太靠谱!!!)。
这个方法的思想是:1.找轮廓;2.提取关键点;3.曲线拟合;4,将各项系数发送至下位机
关键代码:
处理完图片并开启发送数据的线程:
if (true == ImageProcess()) {
DeliveryThread = new Thread(this);// 连接上了就开始传输吧
DeliveryThread.start();
}图片处理:
public boolean ImageProcess() {
Log.e("tag", "go into the picture analysis");
Log.i("tag", "init the matrix");
mRgba = new Mat();
mGray = new Mat();
Utils.bitmapToMat(mImage, mRgba);
Imgproc.cvtColor(mRgba, mGray, Imgproc.COLOR_RGB2GRAY);
// 图像二值化
Mat thresholdImg = mGray;
Imgproc.adaptiveThreshold(mGray, thresholdImg, 255,
Imgproc.ADAPTIVE_THRESH_GAUSSIAN_C, Imgproc.THRESH_BINARY_INV,
7, 7);
// 找轮廓
List<MatOfPoint> contours = new ArrayList<MatOfPoint>();
Mat hierarchy = new Mat();
Imgproc.findContours(thresholdImg, contours, hierarchy,
Imgproc.RETR_LIST, Imgproc.CHAIN_APPROX_NONE);
List<Point> selectPoints = new ArrayList<Point>();// 存储精简后的关键点
// 将点存入数组当中
int SampleTime = 20;// 精简倍数
if (contours != null && contours.size() > 0) {
Log.i("tag", "轮廓个数=" + contours.size());
Log.i("tag", "点个数=" + contours.get(0).size().height);
// Log.i("tag","..="+contours.get(1).size().height);
keyPoints = new byte[((int) (contours.get(0).size().height))
/ SampleTime][8];// 两个int,相当于8个byte
int num = 0;
int count = 0;
org.opencv.core.Point[] points = contours.get(0).toArray();//选择最大的轮廓
try {
// 在SD卡目录下创建.txt文件,true表示当文件存在时,信息追加在文件尾
writeFile = new FileOutputStream(
"/sdcard/Pic.txt", true);
writer = new OutputStreamWriter(writeFile, "gb2312");
} catch (Exception e) {
try {
writeFile.close();
writer.close();
} catch (IOException e1) {
}
}
for (org.opencv.core.Point point : points) {// 遍历每一个point
// Log.i("tag", "x=" + point.x + ",y=" + point.y);
count++;
if (count == SampleTime) {// SampleTime个点采样一个点
count = 0;
Point selectPoint = new Point(point.x, point.y);
selectPoints.add(selectPoint);
byte[] temp_byte = new byte[4];
temp_byte = intToByteArray((int) point.x);
keyPoints[num][0] = temp_byte[0];
keyPoints[num][1] = temp_byte[1];
keyPoints[num][2] = temp_byte[2];
keyPoints[num][3] = temp_byte[3];
temp_byte = intToByteArray((int) point.y);
keyPoints[num][4] = temp_byte[0];
keyPoints[num][5] = temp_byte[1];
keyPoints[num][6] = temp_byte[2];
keyPoints[num][7] = temp_byte[3];
num++;
// 写入txt文档中
try {
writer.write(String.valueOf((int) point.x));
writer.write(" ");//空格
writer.write(String.valueOf((int) point.y));
writer.write("\r\n");//回车换行
writer.flush();
} catch (IOException e) {
try {
writeFile.close();
writer.close();
} catch (IOException e1) {
}
}
}
}
try {
writer.close();
writeFile.close();
} catch (Exception e) {
}
Log.i("tag", "存储完毕!");
}
// 在原来的彩图中画出所有轮廓
Imgproc.drawContours(mRgba, contours, -1, new Scalar(255, 0, 255));
// 将关键点画出在原来的彩图中
for (int i = 0; i < selectPoints.size(); i++) {
Point center = new Point(selectPoints.get(i).x,
selectPoints.get(i).y);
Core.circle(mRgba, center, 4, new Scalar(0, 0, 255), 2);
Core.putText(mRgba, String.valueOf(i+1), new Point(center.x,
center.y), Core.FONT_HERSHEY_SIMPLEX, 0.5, new Scalar(
0, 255, 0));
}
Core.putText(mRgba, "Key Points Number:"+selectPoints.size(), new Point(0,
100), Core.FONT_HERSHEY_SIMPLEX, 1, new Scalar(
255, 0, 255));
Mat showMat = mRgba;// 要在MainActivity中显示的图像矩阵
BmpDis = Bitmap.createBitmap(showMat.width(), showMat.height(),
Config.RGB_565);
Utils.matToBitmap(showMat, BmpDis);
MainActivity.mImage = BmpDis;// 在MainActivity中显示
mAnalysisState = ANALYSIS_OK;
return true;
}发送线程和方法一差不多,这里就不说了。



上图为拟合曲线图与关键点图,红线为拟合后的曲线图。可以看出,效果不太好。换一个试试:
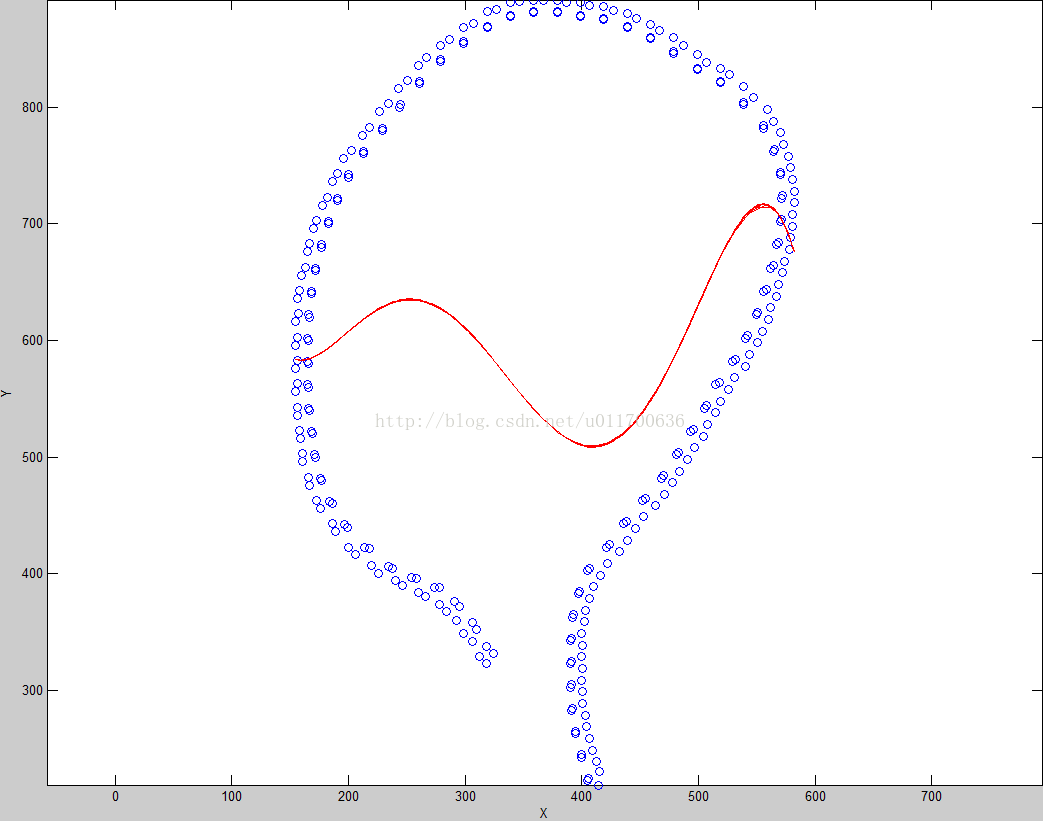
效果也不太好!!!图形太复杂,拟合不出。之后有待研究~