linux uboot 启动顺序
U-Boot启动过程
(国嵌)
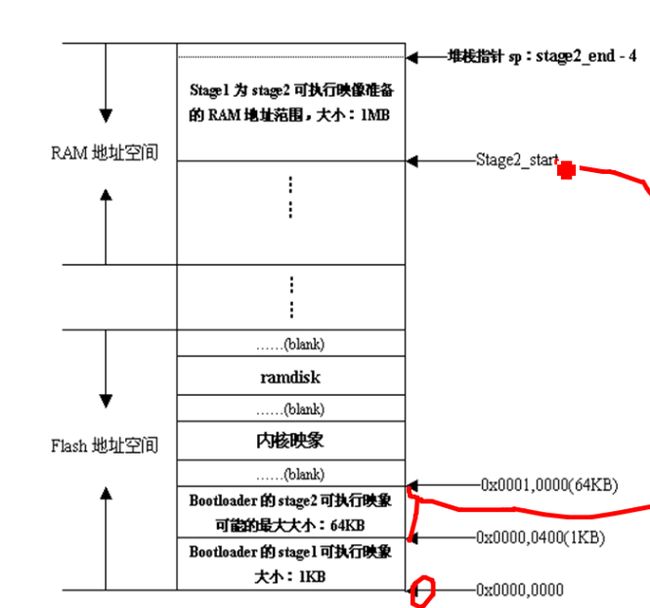
bootloader 除了依赖CPU,还依赖板级设备的配置,例如板卡的硬件地址分配,外设硬件芯片的类型。不同的板子需修改
bootloader。阶段1:硬件初始化,为加载bootloader的二阶段准备RAM空间,拷贝2阶段代码到内存,设置好堆栈,跳到2阶
段,初始化本阶段要的设备,将内核和根文件从flash中拷贝到RAM中,最后调用内核。
开发板上电后,执行U-Boot的第一条指令,然后顺序执行U-Boot启动函数。看一下board/smdk2410/u-boot.lds这个链接脚本,可以知道目标程序的各部分链接顺序。第一个要链接的是cpu/arm920t/start.o,那么U-Boot的入口指令一定位于这个程序中。下面分两阶段介绍启动流程:
第一阶段
1.cpu/arm920t/start.S
这个汇编程序是U-Boot的入口程序,开头就是复位向量的代码。
_start:b reset //复位向量
ldr pc, _undefined_instruction
ldr pc, _software_interrupt
ldr pc, _prefetch_abort
ldr pc, _data_abort
ldr pc, _not_used
ldr pc, _irq //中断向量
ldr pc, _fiq //中断向量
…
/* the actual reset code */
reset: //复位启动子程序
/* 设置CPU为SVC32模式 */
mrs r0,cpsr
bic r0,r0,#0x1f
orr r0,r0,#0xd3
msr cpsr,r0
/* 关闭看门狗 */
…… ……
relocate: /* 把U-Boot重新定位到RAM*/
adr r0, _start /* r0是代码的当前位置 */
ldr r1, _TEXT_BASE /*_TEXT_BASE是RAM中的地址 */
cmp r0, r1 /* 比较r0和r1,判断当前是从Flash启动,还是RAM */
beq stack_setup /* 如果r0等于r1,跳过重定位代码 */
/* 准备重新定位代码 */
ldr r2, _armboot_start
ldr r3, _bss_start
sub r2, r3, r2 /* r2 得到armboot的大小 */
add r2, r0, r2 /* r2 得到要复制代码的末尾地址 */
copy_loop:/* 重新定位代码 */
ldmiar0!, {r3-r10} /*从源地址[r0]复制 */
stmiar1!, {r3-r10} /* 复制到目的地址[r1] */
cmp r0, r2 /* 复制数据块直到源数据末尾地址[r2] */
ble copy_loop
/* 初始化堆栈等 */
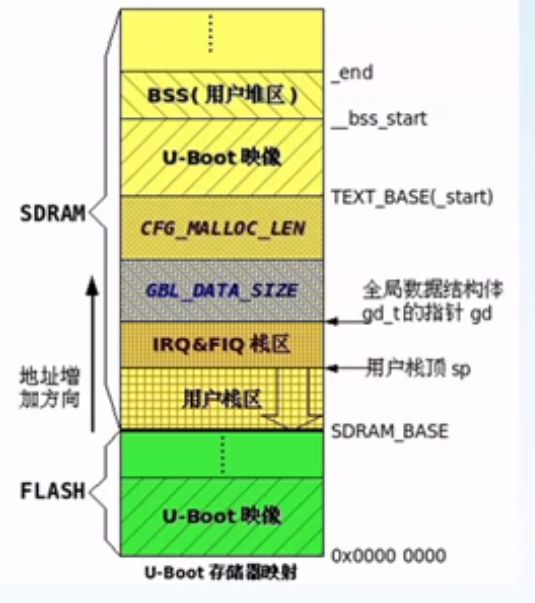
stack_setup:
ldr r0, _TEXT_BASE /* 上面是128 KiB重定位的u-boot */
sub r0, r0, #CFG_MALLOC_LEN /* 向下是内存分配空间 */
sub r0, r0, #CFG_GBL_DATA_SIZE /* 然后是bdinfo结构体地址空间 */
#ifdefCONFIG_USE_IRQ
subr0, r0, #(CONFIG_STACKSIZE_IRQ+CONFIG_STACKSIZE_FIQ)
#endif
sub sp, r0, #12 /* 为abort-stack预留3个字 */
clear_bss:
ldr r0, _bss_start /* 找到bss段起始地址 */
ldr r1, _bss_end /* bss段末尾地址 */
mov r2, #0x00000000 /* 清零 */
clbss_l:strr2, [r0]
/*bss段地址空间清零循环... */
add r0, r0, #4
cmp r0, r1
bne clbss_l
/* 跳转到start_armboot函数入口,_start_armboot字保存函数入口指针 */
ldr pc, _start_armboot
_start_armboot:.word start_armboot //start_armboot函数在lib_arm/board.c中实现
第二阶段
2.lib_arm/board.c
start_armboot是U-Boot执行的第一个C语言函数,完成系统初始化工作,进入主循环,处理用户输入的命令。
3.init_sequence[]
init_sequence[]数组保存着基本的初始化函数指针。
init_fnc_t *init_sequence[] = {
cpu_init, /* 基本的处理器相关配置 -- cpu/arm920t/cpu.c */
board_init,/* 基本的板级相关配置 -- board/smdk2410/smdk2410.c */
interrupt_init, /* 初始化中断处理 -- cpu/arm920t/s3c24x0/interrupt.c */
env_init, /* 初始化环境变量 -- common/cmd_flash.c */
init_baudrate, /* 初始化波特率设置 -- lib_arm/board.c */
serial_init, /* 串口通讯设置 -- cpu/arm920t/s3c24x0/serial.c */
console_init_f, /* 控制台初始化阶段1 -- common/console.c */
display_banner, /* 打印u-boot信息 -- lib_arm/board.c */
dram_init, /* 配置可用的RAM -- board/smdk2410/smdk2410.c */
display_dram_config, /* 显示RAM的配置大小 -- lib_arm/board.c */
NULL,
};
voidstart_armboot (void)
{
/* 顺序执行init_sequence数组中的初始化函数 */
for (init_fnc_ptr = init_sequence;*init_fnc_ptr; ++init_fnc_ptr) {
if ((*init_fnc_ptr)() != 0) {
hang ();
}
}
/*配置可用的Flash*/
size = flash_init ();
display_flash_config (size);
/* _armboot_start 在u-boot.lds链接脚本中定义 */
mem_malloc_init (_armboot_start -CFG_MALLOC_LEN);
/* 配置环境变量*/
env_relocate();
/* 从环境变量中获取IP地址 */
gd->bd->bi_ip_addr= getenv_IPaddr ("ipaddr");
/* 以太网接口MAC 地址 */
……
devices_init (); /* 获取列表中的设备 */
jumptable_init ();
console_init_r (); /* 完整地初始化控制台设备 */
enable_interrupts (); /* 使能中断处理 */
/* 通过环境变量初始化 */
if ((s = getenv ("loadaddr"))!= NULL) {
load_addr = simple_strtoul (s,NULL, 16);
}
/*main_loop()循环不断执行 */
for(;;)
{
main_loop (); /* 主循环函数处理执行用户命令 -- common/main.c */
}
命令实现
U-Boot作为Bootloader,具备多种引导内核启动的方式。常用的go和bootm命令可以直接引导内核映像启动。U-Boot与内核的关系主要是内核启动过程中参数的传递。
1.go命令的实现
/*common/cmd_boot.c */
intdo_go (cmd_tbl_t *cmdtp, int flag, int argc, char *argv[])
{
ulong addr, rc;
int rcode = 0;
if (argc < 2) {
printf ("Usage:\n%s\n",cmdtp->usage);
return 1;
}
addr = simple_strtoul(argv[1], NULL,16);
printf ("## Starting application at0x%08lX ...\n", addr);
rc = ((ulong(*)(int, char []))addr) (--argc, &argv[1]); /*运行程序 */
if (rc != 0) rcode = 1;
printf ("## Application terminated,rc = 0x%lX\n", rc); /*如果是运行linux,这条指令是否能运行?*/
return rcode;
}
go命令调用do_go()函数,跳转到某个地址执行的。如果在这个地址准备好了自引导的内核映像,就可以启动了。尽管go命令可以带变参,实际使用时不用来传递参数。
2.bootm命令的实现
/*common/cmd_bootm.c */
intdo_bootm (cmd_tbl_t *cmdtp, int flag, int argc, char *argv[])
{
…… ……
/* 检查头部 */
if (crc32 (0, (uchar *)data, len) !=checksum) {
puts("Bad Header Checksum\n");
SHOW_BOOT_PROGRESS(-2);
return1;
}
…… ……
/*解压缩*/
switch(hdr->ih_comp) {
case IH_COMP_NONE:
if(ntohl(hdr->ih_load)== addr) {
printf(" XIP %s ... ", name);
}else {
#if defined(CONFIG_HW_WATCHDOG) ||defined(CONFIG_WATCHDOG)
size_tl = len;
void*to = (void *)ntohl(hdr->ih_load);
void*from = (void *)data;
printf(" Loading %s ... ", name);
while(l > 0) {
size_ttail = (l > CHUNKSZ) ? CHUNKSZ : l;
WATCHDOG_RESET();
memmove(to, from, tail);
to+= tail;
from+= tail;
l-= tail;
}
#else /*!(CONFIG_HW_WATCHDOG || CONFIG_WATCHDOG) */
memmove((void *) ntohl(hdr->ih_load), (uchar *)data, len);
#endif /*CONFIG_HW_WATCHDOG || CONFIG_WATCHDOG */
}
break;
case IH_COMP_GZIP:
printf(" Uncompressing %s ... ",name);
if(gunzip ((void *)ntohl(hdr->ih_load), unc_len,
(uchar *)data, &len) != 0) {
puts("GUNZIP ERROR - must RESET board to recover\n");
SHOW_BOOT_PROGRESS(-6);
do_reset(cmdtp, flag, argc, argv);
}
break;
#ifdef CONFIG_BZIP2
caseIH_COMP_BZIP2:
printf(" Uncompressing %s ... ",name);
/*
* If we've got less than 4 MB of malloc()space,
* use slower decompression algorithm whichrequires
* at most 2300 KB of memory.
*/
i= BZ2_bzBuffToBuffDecompress ((char*)ntohl(hdr->ih_load),
&unc_len,(char *)data, len,
CFG_MALLOC_LEN< (4096 * 1024), 0);
if(i != BZ_OK) {
printf("BUNZIP2 ERROR %d - must RESET board to recover\n", i);
SHOW_BOOT_PROGRESS(-6);
udelay(100000);
do_reset(cmdtp, flag, argc, argv);
}
break;
#endif /* CONFIG_BZIP2 */
default:
if(iflag)
enable_interrupts();
printf("Unimplemented compression type %d\n", hdr->ih_comp);
SHOW_BOOT_PROGRESS(-7);
return1;
}
}
…… …… ……
switch(hdr->ih_os) {
default: /*handled by (original) Linux case */
case IH_OS_LINUX:
do_bootm_linux (cmdtp, flag,argc, argv,
addr, len_ptr, verify);
break;
case IH_OS_NETBSD:
do_bootm_netbsd (cmdtp, flag, argc, argv,
addr, len_ptr, verify);
break;
case IH_OS_RTEMS:
do_bootm_rtems (cmdtp, flag, argc, argv,
addr, len_ptr, verify);
break;
case IH_OS_VXWORKS:
do_bootm_vxworks (cmdtp, flag, argc, argv,
addr, len_ptr, verify);
break;
case IH_OS_QNX:
do_bootm_qnxelf (cmdtp, flag, argc, argv,
addr, len_ptr, verify);
break;
}
bootm命令调用do_bootm函数。这个函数专门用来引导各种操作系统映像,可以支持引导Linux、vxWorks、QNX等操作系统。引导Linux的时候,调用do_bootm_linux()函数。
3.do_bootm_linux函数的实现
/*lib_arm/armlinux.c */
voiddo_bootm_linux (cmd_tbl_t *cmdtp, int flag, int argc, char *argv[],
ulong addr, ulong *len_ptr,int verify)
{
theKernel = (void (*)(int, int,uint))ntohl(hdr->ih_ep);
… … … …
/* we assume that the kernel is in place*/
printf ("\nStarting kernel ...\n\n");
… … … …
theKernel (0, bd->bi_arch_number,bd->bi_boot_params); /*启动内核,传递启动参数*/
}
do_bootm_linux()函数是专门引导Linux映像的函数,它还可以处理ramdisk文件系统的映像。这里引导的内核映像和ramdisk映像,必须是U-Boot格式的。U-Boot格式的映像可以通过mkimage工具来转换,其中包含了U-Boot可以识别的符号。