【图像处理】基于OpenCV底层实现的滤波
image processing 系列
- 【图像处理】直方图匹配
- 【图像处理】图片旋转
高斯滤波
高斯滤波器介绍: wikipedia。高斯滤波器的未知数(或者说函数输入)有两个:(1)滤波器核半径;(2)σ(正态分布的标准偏差)。在连续二维空间中,这个函数长这样:
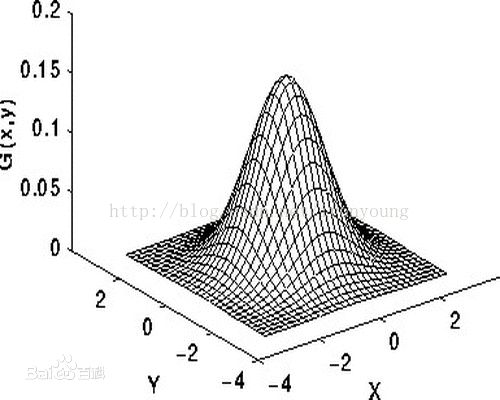
除了函数中心是极大值,周围都是围绕中心对称的。
这样有一个好处,因为滤波器实质上是
卷积(convolution)操作,卷积操作需要将核函数围绕
中心翻转之后,在与对应矩阵中各个数相乘(注意:此时
不是矩阵相乘,只是函数核中每个数字单独的相乘,不涉及整体相乘求和)。而高斯函数的对称的,所以函数核翻不翻转都一样结果。
首先,我们需要根据核半径(代码中slab = 2*r + 1)、σ(sigma)求出高斯核函数矩阵:
// get Gaussian Kernel Function
void ycGaussianKernel(float* kernel, int sigma, int slab)
{
int index;
float dx2, dy2;
float sum = 0;
for(int i=0; i<slab; i++)
{
dx2 = pow(i - (slab - 1)/2.0, 2);
for(int j=0; j<slab; j++)
{
dy2 = pow(j - (slab - 1)/2.0, 2);
index = i*slab + j;
kernel[index] = exp(-(dx2 + dy2)/2/pow(sigma, 2)) / (2*PI*pow(sigma, 2));
//printf("%f\n", kernel[index]);
sum += kernel[index];
}
}
for(int k=0; k< slab*slab; k++)
{
kernel[k] = kernel[k] / sum;
//printf("%f\n", kernel[k]);
}
}这样可以得到高斯滤波函数为:
// Gaussian filter
Mat filterGaussian(cv::Mat img, const float sigma, const int slab)
{
cvtColor(img, img, CV_BGR2GRAY);
Mat retMat = Mat::zeros(img.rows, img.cols, CV_8UC1);
for(int i=0; i<img.rows; i++)
for(int j=0; j<img.cols; j++)
retMat.at<uchar>(i, j) = img.at<uchar>(i, j);
// 一维数组模拟二维数组
float* kernel = new float[slab * slab];
int* xLocation = new int[slab];
int* yLocation = new int[slab];
ycGaussianKernel(kernel, sigma, slab);
float sum;
int index;
// 对于边缘,这里采取直接舍弃不计算的方法。因此,循环起点是 slab/2
for(int i= slab/2; i<img.rows - slab/2; i++)
{
xLocation[slab/2] = i;
for(int delta = 0; delta <= slab/2; delta++)
{
xLocation[slab/2 - delta] = i - delta;
xLocation[slab/2 + delta] = i + delta;
}
for(int j= slab/2; j<img.cols - slab/2; j++)
{
yLocation[slab/2] = j;
for(int delta = 0; delta <= slab/2; delta++)
{
yLocation[slab/2 - delta] = j - delta;
yLocation[slab/2 + delta] = j + delta;
}
sum = 0;
for(int fi=0; fi < slab; fi++)
{
for(int fj=0; fj < slab; fj++)
{
index = fi*slab + fj;
sum += kernel[index] * img.at<uchar>(xLocation[fi], yLocation[fj]);
}
}
retMat.at<uchar>(i ,j) = sum;
}
}
return retMat;
}
均值滤波
这个没啥好说的,就是函数核内所有像素点求和之后平均,平均值即为核中心上的像素值。需要输入滤波核半径。
// Mean filter: 均值滤波器
Mat filterMean(cv::Mat img, const int slab)
{
cvtColor(img, img, CV_BGR2GRAY);
Mat retMat = Mat::zeros(img.rows, img.cols, CV_8UC1);
for(int i=0; i<img.rows; i++)
for(int j=0; j<img.cols; j++)
retMat.at<uchar>(i, j) = img.at<uchar>(i, j);
int* xLocation = new int[slab];
int* yLocation = new int[slab];
float sum;
int index;
for(int i= slab/2; i<img.rows - slab/2; i++)
{
xLocation[slab/2] = i;
for(int delta = 0; delta <= slab/2; delta++)
{
xLocation[slab/2 - delta] = i - delta;
xLocation[slab/2 + delta] = i + delta;
}
for(int j= slab/2; j<img.cols - slab/2; j++)
{
yLocation[slab/2] = j;
for(int delta = 0; delta <= slab/2; delta++)
{
yLocation[slab/2 - delta] = j - delta;
yLocation[slab/2 + delta] = j + delta;
}
sum = 0;
for(int fi=0; fi < slab; fi++)
{
for(int fj=0; fj < slab; fj++)
{
index = fi*slab + fj;
sum += img.at<uchar>(xLocation[fi], yLocation[fj]);
}
}
retMat.at<uchar>(i ,j) = sum/(slab * slab);
}
}
return retMat;
}
中值滤波
中值滤波跟均值滤波听起来很像,但不是一回事。中值滤波是将滤波核内各个像素由从小到大顺序排列,然后取序列中值作为核中心像素的值。需要输入滤波核半径,并且对于现有的像素序列排序。排序函数我是用快排(quickSort)写的,见 这里。滤波器代码:// Median filter: 中值滤波器
Mat filterMedian(cv::Mat img, const int slab)
{
cvtColor(img, img, CV_BGR2GRAY);
Mat retMat = Mat::zeros(img.rows, img.cols, CV_8UC1);
for(int i=0; i<img.rows; i++)
for(int j=0; j<img.cols; j++)
retMat.at<uchar>(i, j) = img.at<uchar>(i, j);
int* xLocation = new int[slab];
int* yLocation = new int[slab];
int* tmpArr = new int[slab * slab];
float sum;
int index;
for(int i= slab/2; i<img.rows - slab/2; i++)
{
xLocation[slab/2] = i;
for(int delta = 0; delta <= slab/2; delta++)
{
xLocation[slab/2 - delta] = i - delta;
xLocation[slab/2 + delta] = i + delta;
}
for(int j= slab/2; j<img.cols - slab/2; j++)
{
yLocation[slab/2] = j;
for(int delta = 0; delta <= slab/2; delta++)
{
yLocation[slab/2 - delta] = j - delta;
yLocation[slab/2 + delta] = j + delta;
}
for(int fi = 0; fi<slab; fi++)
for(int fj =0; fj<slab; fj++)
{
index = fi*slab + fj;
tmpArr[index] = img.at<uchar>(xLocation[fi], yLocation[fj]);
}
quickSort(tmpArr, 0, slab*slab - 1);
retMat.at<uchar>(i ,j) = tmpArr[slab * slab / 2];
}
}
return retMat;
}
滤波效果
原图为lena图,即:

对于高斯滤波,当sigma = 3,核函数为 3*3(slab = 3,核半径为 1)时,结果为:

对于均值滤波,当核函数为 5*5(slab = 5,核半径为 2)时,结果为:

对于中值滤波,当核函数为 7*7(slab = 7,核半径为 3)时,结果为:
