STM32单片机学习(12) 红外信号接收解码(外部中断)
【转载请注明出处:http://blog.csdn.net/leytton/article/details/38687537】
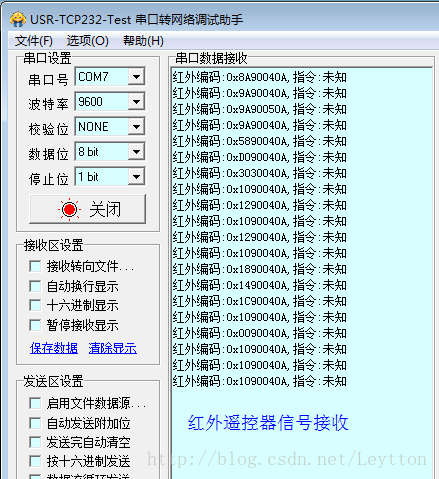
本程序主要利用外部中断,实现红外遥控器信号接收解码,并利用串口通信把编码传至计算机显示
注:![]() 请用质量好点的遥控器实验
请用质量好点的遥控器实验![]() 用了劣质遥控器浪费了一天时间,数据位接收总是不完整,后来用宿舍空调遥控器就解码成功了
用了劣质遥控器浪费了一天时间,数据位接收总是不完整,后来用宿舍空调遥控器就解码成功了![]()
相关资料
STM32单片机学习(2) 外部中断 http://blog.csdn.net/leytton/article/details/38063335
STM32单片机学习(3) 串口中断通信 http://blog.csdn.net/leytton/article/details/38393553
STM32单片机学习(7) 串口通信printf重定向 http://blog.csdn.net/leytton/article/details/38393967
STM32-外设篇 视频教程(Cortex-M3)-主讲人:刘洋 http://yun.baidu.com/pcloud/album/info?uk=2853967793&album_id=5492137931588632574
贴代码:
/*******************************************************************************
*
* 软件功能: 红外线接收
*
*******************************************************************************/
#include "stm32f10x.h"
#include <stdio.h>
#include "delay.h"
void RCC_Configuration(void);
void GPIO_Configuration(void);
void USART1_Configuration(void);
void Uart1_PutChar(u8 ch);
void Uart1_PutString(u8* buf , u8 len);
int fputc(int ch, FILE *f);
void NVIC_Configuration(void);
void EXTI_Configuration(void);
u8 HW_ReceiveTime(void);
/*************************************************
函数: int main(void)
功能: main主函数
参数: 无
返回: 无
**************************************************/
int main(void)
{
RCC_Configuration();
GPIO_Configuration();
delay_init(72);
USART1_Configuration();
NVIC_Configuration();
EXTI_Configuration();
printf("start\n");
GPIO_ResetBits(GPIOA,GPIO_Pin_0);//灭
while(1);
}
/*************************************************
函数: void RCC_Configuration(void)
功能: 复位和时钟控制 配置
参数: 无
返回: 无
**************************************************/
void RCC_Configuration(void)
{
ErrorStatus HSEStartUpStatus; //定义外部高速晶体启动状态枚举变量
RCC_DeInit(); //复位RCC外部设备寄存器到默认值
RCC_HSEConfig(RCC_HSE_ON); //打开外部高速晶振
HSEStartUpStatus = RCC_WaitForHSEStartUp(); //等待外部高速时钟准备好
if(HSEStartUpStatus == SUCCESS) //外部高速时钟已经准别好
{
FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable); //开启FLASH预读缓冲功能,加速FLASH的读取。所有程序中必须的用法.位置:RCC初始化子函数里面,时钟起振之后
FLASH_SetLatency(FLASH_Latency_2); //flash操作的延时
RCC_HCLKConfig(RCC_SYSCLK_Div1); //配置AHB(HCLK)时钟等于==SYSCLK
RCC_PCLK2Config(RCC_HCLK_Div1); //配置APB2(PCLK2)钟==AHB时钟
RCC_PCLK1Config(RCC_HCLK_Div2); //配置APB1(PCLK1)钟==AHB1/2时钟
RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9); //配置PLL时钟 == 外部高速晶体时钟 * 9 = 72MHz
RCC_PLLCmd(ENABLE); //使能PLL时钟
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET) //等待PLL时钟就绪
{
}
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK); //配置系统时钟 = PLL时钟
while(RCC_GetSYSCLKSource() != 0x08) //检查PLL时钟是否作为系统时钟
{
}
}
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1 | RCC_APB2Periph_AFIO, ENABLE); //允许 GPIOA、USART1、AFIO时钟
}
/*************************************************
函数: void GPIO_Configuration(void)
功能: GPIO配置
参数: 无
返回: 无
**************************************************/
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure; //定义GPIO初始化结构体
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复合推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure); //PA9串口输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //红外接收
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //配置成上拉输入;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
/*******************************************************************************
函数名:USART1_Configuration
输 入:
输 出:
功能说明:
初始化串口硬件设备,启用中断
配置步骤:
(1)打开GPIO和USART1的时钟
(2)设置USART1两个管脚GPIO模式
(3)配置USART1数据格式、波特率等参数
(4)使能USART1接收中断功能
(5)最后使能USART1功能
*/
void USART1_Configuration(void) //串口配置 详见《STM32的函数说明(中文).pdf》P346
{
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate=9600; //波特率为9600
USART_InitStructure.USART_WordLength=USART_WordLength_8b; //数据位为8
USART_InitStructure.USART_StopBits=USART_StopBits_1; //在帧结尾传输 1 个停止位
USART_InitStructure.USART_Parity=USART_Parity_No; //校验模式:奇偶失能
USART_InitStructure.USART_HardwareFlowControl=USART_HardwareFlowControl_None; //硬件流控制失能
USART_InitStructure.USART_Mode=USART_Mode_Tx | USART_Mode_Rx; //USART_Mode 指定了使能或者失能发送和接收模式:发送使能|接收失能
USART_Init(USART1, &USART_InitStructure); //初始化配置
USART_Cmd(USART1,ENABLE); //使能或者失能 USART 外设
USART_ClearFlag(USART1, USART_FLAG_TC);//清除传输完成标志位,否则可能会丢失第1个字节的数据.USART_FLAG_TC为发送完成标志位
}
//发送一个字符
void Uart1_PutChar(u8 ch)
{
USART_SendData(USART1, (u8) ch);
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);//等待发送完成
}
//发送一个字符串 Input : buf为发送数据的地址 , len为发送字符的个数
void Uart1_PutString(u8* buf , u8 len)
{
u8 i;
for(i=0;i<len;i++)
{
Uart1_PutChar(*(buf++));
}
}
int fputc(int ch, FILE *f)
{
Uart1_PutChar((u8)ch); //此处为自定义函数,参见串口中断通信,请勿盲目复制
return (ch);
}
void NVIC_Configuration(void) //中断分组和优先级配置 详见《STM32的函数说明(中文).pdf》P165
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0); //0组,先占优先级0位,从优先级4位
NVIC_InitStructure.NVIC_IRQChannel = EXTI9_5_IRQn; //外部中断线 9_5 中断(5-9号引脚是统一使用中断线EXTI9_5_IRQn)
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //0组无抢占优先级,所以只配置从优先级,即响应式优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//使能
NVIC_Init(& NVIC_InitStructure); //初始化配置
}
void EXTI_Configuration(void) //中断配置 //详见《STM32的函数说明(中文).pdf》 P99
{
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_ClearITPendingBit(EXTI_Line8);//清除 EXTI 线路挂起位
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; //设置 EXTI 线路为中断请求
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; //设置输入线路下降沿为中断请求
EXTI_InitStructure.EXTI_Line = EXTI_Line8; //外部中断线 8
EXTI_InitStructure.EXTI_LineCmd = ENABLE;//使能
EXTI_Init(& EXTI_InitStructure); //初始化配置
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource8); ///*将EXTI线8连接到PA8*/
}
u8 HW_ReceiveTime(void)
{
u8 t=0;
while(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_8)==1)//高电平
{
t++;
delay_us(20);
if(t>=250) return t;//超时溢出
}
return t;
}
/*********************************************************
中断服务程序
********************************************************/
void EXTI9_5_IRQHandler()
{
u8 time=0,startSignal=0,Data=0,Count=0;
u32 HW_ReceivedData=0;
//printf("1\n");
if(EXTI_GetITStatus(EXTI_Line8) == SET)//检查指定的EXTI线路触发请求发生与否,返回一个EXTI_Line新状态
{
//printf("5\n");
//if(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0)) GPIO_SetBits(GPIOA,GPIO_Pin_0);//点亮LED
//else GPIO_ResetBits(GPIOA,GPIO_Pin_0);//灭
while(1)
{
if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_8)==1)
{
time = HW_ReceiveTime();
if(time>=250)
{
//printf("VoverTime:%x\n",time);
startSignal=0;
HW_ReceivedData=0;
Count=0;
break;
}
else if(time>=200 && time<250)
{
startSignal=1;//收到起始信号
HW_ReceivedData=0;
Count=0;
continue;
}
else if(time>=60 && time<90) Data=1;//收到数据 1
else if(time>=10 && time<50) Data=0;//收到数据 0
//printf("%x ",Data);
if(startSignal==1)
{
HW_ReceivedData<<=1;
HW_ReceivedData+=Data;
Count++;
if(Count>=32)
{
//printf("received:%x\n",HW_ReceivedData);
if(HW_ReceivedData==0x1090000a) printf("红外编码:0x%8X,指令:打开空调\n",HW_ReceivedData);
else if(HW_ReceivedData==0x90000a) printf("红外编码:0x%08X,指令:关闭空调\n",HW_ReceivedData);
else printf("红外编码:0x%08X,指令:未知\n",HW_ReceivedData);
HW_ReceivedData=0;
Count=0;
startSignal=0;
break;
}
}
}
}
EXTI_ClearITPendingBit(EXTI_Line8);//清除线路挂起位
EXTI_ClearFlag(EXTI_Line8);//清除中断挂起位
}
}