PX4飞控中利用EKF估计姿态角代码详解
PX4飞控中利用EKF估计姿态角代码详解
PX4飞控中主要用EKF算法来估计飞行器三轴姿态角,具体c文件在px4\Firmware\src\modules\attitude_estimator_ekf\codegen\目录下
- 具体原理
- 程序详解
- 下一步
1.具体原理
EKF算法原理不再多讲,具体可参见上一篇blog http://blog.csdn.net/lizilpl/article/details/45289541.
这篇讲EKF算法执行过程,需要以下几个关键式子:
飞行器状态矩阵:

这里
 表示三轴角速度,
表示三轴角速度, 表示三轴角加速度,
表示三轴角加速度, 表示加速度在机体坐标系三轴分量,
表示加速度在机体坐标系三轴分量, ,表示磁力计在机体坐标系三轴分量。
,表示磁力计在机体坐标系三轴分量。测量矩阵
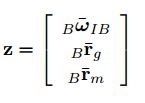 分别由三轴陀螺仪,加速度计,磁力计测得。
分别由三轴陀螺仪,加速度计,磁力计测得。状态转移矩阵:
飞行器下一时刻状态预测矩阵如下:
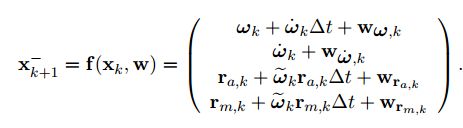
其中W项均为高斯噪声,
 为飞行器在姿态发生变化后,坐标系余旋变换矩阵,对该函数在
为飞行器在姿态发生变化后,坐标系余旋变换矩阵,对该函数在 处求一阶偏导,可得到状态转移矩阵:
处求一阶偏导,可得到状态转移矩阵: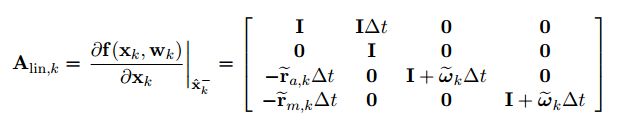
此时可得到飞行器状态的先验估计:

利用测量值修正先验估计:

这里测量矩阵H与状态矩阵X为线性关系,故无需求偏导。
卡尔曼增益:

状态后验估计:

方差后验估计:

2.程序详解
整个EKF的代码挺长的,大部分是矩阵运算,而且使用嵌套for循环来执行的,所以读起来比较费劲,但是要是移植到自己工程上的话必然离不开这一步,所以花了一个下午把各个细节理清楚,顺便记录分享。
/* Include files */
#include "rt_nonfinite.h"
#include "attitudeKalmanfilter.h"
#include "rdivide.h"
#include "norm.h"
#include "cross.h"
#include "eye.h"
#include "mrdivide.h"
/* '输入参数:updateVect[3]:用来记录陀螺仪,加速度计,磁力计传感器数值是否有效 z[9] :测量矩阵 x_aposteriori_k[12]:上一时刻状态后验估计矩阵,用来预测当前状态 P_aposteriori_k[144]:上一时刻后验估计方差 eulerAngles[3] :输出欧拉角 Rot_matrix[9] :输出余弦矩阵 x_aposteriori[12] :输出状态后验估计矩阵 P_aposteriori[144] :输出方差后验估计矩阵' */
void attitudeKalmanfilter(
const uint8_T updateVect[3],
real32_T dt,
const real32_T z[9],
const real32_T x_aposteriori_k[12],
const real32_T P_aposteriori_k[144],
const real32_T q[12],
real32_T r[9],
real32_T eulerAngles[3],
real32_T Rot_matrix[9],
real32_T x_aposteriori[12],
real32_T P_aposteriori[144])
{
/*以下这一堆变量用到的时候再解释*/
real32_T wak[3];
real32_T O[9];
real_T dv0[9];
real32_T a[9];
int32_T i;
real32_T b_a[9];
real32_T x_n_b[3];
real32_T b_x_aposteriori_k[3];
real32_T z_n_b[3];
real32_T c_a[3];
real32_T d_a[3];
int32_T i0;
real32_T x_apriori[12];
real_T dv1[144];
real32_T A_lin[144];
static const int8_T iv0[36] = { 0, 0, 0,
0, 0, 0,
0, 0, 0,
1, 0, 0,
0, 1, 0,
0, 0, 1,
0, 0, 0,
0, 0, 0,
0, 0, 0,
0, 0, 0,
0, 0, 0,
0, 0, 0 };
real32_T b_A_lin[144];
real32_T b_q[144];
real32_T c_A_lin[144];
real32_T d_A_lin[144];
real32_T e_A_lin[144];
int32_T i1;
real32_T P_apriori[144];
real32_T b_P_apriori[108];
static const int8_T iv1[108] = { 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1 };
real32_T K_k[108];
real32_T fv0[81];
static const int8_T iv2[108] = { 1, 0, 0, 0, 0, 0, 0, 0, 0,
0, 1, 0, 0, 0, 0, 0, 0, 0,
0, 0, 1, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 1, 0, 0, 0, 0, 0,
0, 0, 0, 0, 1, 0, 0, 0, 0,
0, 0, 0, 0, 0, 1, 0, 0, 0,
0, 0, 0, 0, 0, 0, 1, 0, 0,
0, 0, 0, 0, 0, 0, 0, 1, 0,
0, 0, 0, 0, 0, 0, 0, 0, 1 };
real32_T b_r[81];
real32_T fv1[81];
real32_T f0;
real32_T c_P_apriori[36]=
{ 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 1, 0, 0,0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0 };
real32_T fv2[36];
static const int8_T iv4[36] = { 1, 0, 0,
0, 1, 0,
0, 0, 1,
0, 0, 0,
0, 0, 0,
0, 0, 0,
0, 0, 0,
0, 0, 0,
0, 0, 0 };
real32_T c_r[9];
real32_T b_K_k[36];
real32_T d_P_apriori[72];
static const int8_T iv5[72]
= { 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0 };
real32_T c_K_k[72];
static const int8_T iv6[72] = { 1, 0, 0, 0, 0, 0,
0, 1, 0, 0, 0, 0,
0, 0, 1, 0, 0, 0,
0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0,
0, 0, 0, 1, 0, 0,
0, 0, 0, 0, 1, 0,
0, 0, 0, 0, 0, 1,
0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0 };
real32_T b_z[6];
static const int8_T iv7[72]
= { 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1 };
static const int8_T iv8[72]
= { 1, 0, 0, 0, 0, 0,
0, 1, 0, 0, 0, 0,
0, 0, 1, 0, 0, 0,
0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0,
0, 0, 0, 1, 0, 0,
0, 0, 0, 0, 0, 1 };
real32_T fv3[6];
real32_T c_z[6];
/*开始计算*/
/*'wak[]为当前状态三轴角加速度'*/
wak[0] = x_aposteriori_k[3];
wak[1] = x_aposteriori_k[4];
wak[2] = x_aposteriori_k[5];/* ‘欧拉角旋转矩阵’
这里的O矩阵相当于A矩阵中的
*/
O[0] = 0.0F;
O[1] = -x_aposteriori_k[2];
O[2] = x_aposteriori_k[1];
O[3] = x_aposteriori_k[2];
O[4] = 0.0F;
O[5] = -x_aposteriori_k[0];
O[6] = -x_aposteriori_k[1];
O[7] = x_aposteriori_k[0];
O[8] = 0.0F;
/* 预测转过一个小角度之后的重力向量三轴投影 */
/* a = [1, -delta_z, delta_y; * delta_z, 1 , -delta_x; * -delta_y, delta_x, 1 ]'; */
eye(dv0); //dv0矩阵单位化
for (i = 0; i < 9; i++) {
a[i] = (real32_T)dv0[i] + O[i] * dt;
}
/* 预测转过一个小角度之后的磁力向量三轴投影 */
eye(dv0);
for (i = 0; i < 9; i++) {
b_a[i] = (real32_T)dv0[i] + O[i] * dt;
}
/*
其实就是这个大家都很眼熟的的余弦矩阵的转置, 用来更新机体转过一个角度之后的重力和磁力三轴投影,只不过两次计算间隔时间很短,变化角度很小,因此忽略高阶小量之后就变成了这个样子。这里还少一个时间系数dt,下面会补上。
*/
x_n_b[0] = x_aposteriori_k[0]; //角速度
x_n_b[1] = x_aposteriori_k[1];
x_n_b[2] = x_aposteriori_k[2];
b_x_aposteriori_k[0] = x_aposteriori_k[6]; // 加速度
b_x_aposteriori_k[1] = x_aposteriori_k[7];
b_x_aposteriori_k[2] = x_aposteriori_k[8];
z_n_b[0] = x_aposteriori_k[9]; //磁力计
z_n_b[1] = x_aposteriori_k[10];
z_n_b[2] = x_aposteriori_k[11];
for (i = 0; i < 3; i++) {
c_a[i] = 0.0F;
for (i0 = 0; i0 < 3; i0++) {
c_a[i] += a[i + 3 * i0] * b_x_aposteriori_k[i0];
}
d_a[i] = 0.0F;
for (i0 = 0; i0 < 3; i0++) {
d_a[i] += b_a[i + 3 * i0] * z_n_b[i0];
}
x_apriori[i] = x_n_b[i] + dt * wak[i];
}
for (i = 0; i < 3; i++) {
x_apriori[i + 3] = wak[i];
}
for (i = 0; i < 3; i++) {
x_apriori[i + 6] = c_a[i];
}
for (i = 0; i < 3; i++) {
x_apriori[i + 9] = d_a[i];
} //得到状态先验估计 /*
根据上述矩阵运算,可以得到:
从而:
从而:
其中
得到状态先验估计:
Xk+1[12∗1]=x_apriori[1∗12]T=[x_n_b+wak∗dtwakc_ad_a]T
*/
/* '开始计算A矩阵'*/
b_eye(dv1);
for (i = 0; i < 12; i++) {
for (i0 = 0; i0 < 3; i0++) {
A_lin[i0 + 12 * i] = (real32_T)iv0[i0 + 3 * i];
} /*1 2 3列*/
for (i0 = 0; i0 < 3; i0++) {
A_lin[(i0 + 12 * i) + 3] = 0.0F;
} /*3 4 5列*/
}
/*6 7 8 列*/
A_lin[6] = 0.0F;
A_lin[7] = x_aposteriori_k[8];
A_lin[8] = -x_aposteriori_k[7];
A_lin[18] = -x_aposteriori_k[8];
A_lin[19] = 0.0F;
A_lin[20] = x_aposteriori_k[6];
A_lin[30] = x_aposteriori_k[7];
A_lin[31] = -x_aposteriori_k[6];
A_lin[32] = 0.0F;
for (i = 0; i < 3; i++) {
for (i0 = 0; i0 < 3; i0++) {
A_lin[(i0 + 12 * (i + 3)) + 6] = 0.0F;
}
}
for (i = 0; i < 3; i++) {
for (i0 = 0; i0 < 3; i0++) {
A_lin[(i0 + 12 * (i + 6)) + 6] = O[i0 + 3 * i];
}
}
for (i = 0; i < 3; i++) {
for (i0 = 0; i0 < 3; i0++) {
A_lin[(i0 + 12 * (i + 9)) + 6] = 0.0F;
}
}
/*6 7 8 列*/
/*9 10 11 列*/
A_lin[9] = 0.0F;
A_lin[10] = x_aposteriori_k[11];
A_lin[11] = -x_aposteriori_k[10];
A_lin[21] = -x_aposteriori_k[11];
A_lin[22] = 0.0F;
A_lin[23] = x_aposteriori_k[9];
A_lin[33] = x_aposteriori_k[7];
A_lin[34] = -x_aposteriori_k[9];
A_lin[35] = 0.0F;
for (i = 0; i < 3; i++) {
for (i0 = 0; i0 < 3; i0++) {
A_lin[(i0 + 12 * (i + 3)) + 9] = 0.0F;
}
}
for (i = 0; i < 3; i++) {
for (i0 = 0; i0 < 3; i0++) {
A_lin[(i0 + 12 * (i + 6)) + 9] = 0.0F;
}
}
for (i = 0; i < 3; i++) {
for (i0 = 0; i0 < 3; i0++) {
A_lin[(i0 + 12 * (i + 9)) + 9] = O[i0 + 3 * i];
}
}
/*9 10 11 列*//*
根据上述矩阵运算,可以得到A_lin矩阵:
同样
*/
for (i = 0; i < 12; i++) {
for (i0 = 0; i0 < 12; i0++) {
b_A_lin[i0 + 12 * i] = (real32_T)dv1[i0 + 12 * i] + A_lin[i0 + 12 * i] *dt;
}
} //最终A_link,k的逆矩阵得到:
/*
开始根据![]() 计算过程方差
计算过程方差
*/
b_q[0] = q[0];
b_q[12] = 0.0F;
b_q[24] = 0.0F;
b_q[36] = 0.0F;
b_q[48] = 0.0F;
b_q[60] = 0.0F;
b_q[72] = 0.0F;
b_q[84] = 0.0F;
b_q[96] = 0.0F;
b_q[108] = 0.0F;
b_q[120] = 0.0F;
b_q[132] = 0.0F;
b_q[1] = 0.0F;
b_q[13] = q[0];
b_q[25] = 0.0F;
b_q[37] = 0.0F;
b_q[49] = 0.0F;
b_q[61] = 0.0F;
b_q[73] = 0.0F;
b_q[85] = 0.0F;
b_q[97] = 0.0F;
b_q[109] = 0.0F;
b_q[121] = 0.0F;
b_q[133] = 0.0F;
b_q[2] = 0.0F;
b_q[14] = 0.0F;
b_q[26] = q[0];
b_q[38] = 0.0F;
b_q[50] = 0.0F;
b_q[62] = 0.0F;
b_q[74] = 0.0F;
b_q[86] = 0.0F;
b_q[98] = 0.0F;
b_q[110] = 0.0F;
b_q[122] = 0.0F;
b_q[134] = 0.0F;
b_q[3] = 0.0F;
b_q[15] = 0.0F;
b_q[27] = 0.0F;
b_q[39] = q[1];
b_q[51] = 0.0F;
b_q[63] = 0.0F;
b_q[75] = 0.0F;
b_q[87] = 0.0F;
b_q[99] = 0.0F;
b_q[111] = 0.0F;
b_q[123] = 0.0F;
b_q[135] = 0.0F;
b_q[4] = 0.0F;
b_q[16] = 0.0F;
b_q[28] = 0.0F;
b_q[40] = 0.0F;
b_q[52] = q[1];
b_q[64] = 0.0F;
b_q[76] = 0.0F;
b_q[88] = 0.0F;
b_q[100] = 0.0F;
b_q[112] = 0.0F;
b_q[124] = 0.0F;
b_q[136] = 0.0F;
b_q[5] = 0.0F;
b_q[17] = 0.0F;
b_q[29] = 0.0F;
b_q[41] = 0.0F;
b_q[53] = 0.0F;
b_q[65] = q[1];
b_q[77] = 0.0F;
b_q[89] = 0.0F;
b_q[101] = 0.0F;
b_q[113] = 0.0F;
b_q[125] = 0.0F;
b_q[137] = 0.0F;
b_q[6] = 0.0F;
b_q[18] = 0.0F;
b_q[30] = 0.0F;
b_q[42] = 0.0F;
b_q[54] = 0.0F;
b_q[66] = 0.0F;
b_q[78] = q[2];
b_q[90] = 0.0F;
b_q[102] = 0.0F;
b_q[114] = 0.0F;
b_q[126] = 0.0F;
b_q[138] = 0.0F;
b_q[7] = 0.0F;
b_q[19] = 0.0F;
b_q[31] = 0.0F;
b_q[43] = 0.0F;
b_q[55] = 0.0F;
b_q[67] = 0.0F;
b_q[79] = 0.0F;
b_q[91] = q[2];
b_q[103] = 0.0F;
b_q[115] = 0.0F;
b_q[127] = 0.0F;
b_q[139] = 0.0F;
b_q[8] = 0.0F;
b_q[20] = 0.0F;
b_q[32] = 0.0F;
b_q[44] = 0.0F;
b_q[56] = 0.0F;
b_q[68] = 0.0F;
b_q[80] = 0.0F;
b_q[92] = 0.0F;
b_q[104] = q[2];
b_q[116] = 0.0F;
b_q[128] = 0.0F;
b_q[140] = 0.0F;
b_q[9] = 0.0F;
b_q[21] = 0.0F;
b_q[33] = 0.0F;
b_q[45] = 0.0F;
b_q[57] = 0.0F;
b_q[69] = 0.0F;
b_q[81] = 0.0F;
b_q[93] = 0.0F;
b_q[105] = 0.0F;
b_q[117] = q[3];
b_q[129] = 0.0F;
b_q[141] = 0.0F;
b_q[10] = 0.0F;
b_q[22] = 0.0F;
b_q[34] = 0.0F;
b_q[46] = 0.0F;
b_q[58] = 0.0F;
b_q[70] = 0.0F;
b_q[82] = 0.0F;
b_q[94] = 0.0F;
b_q[106] = 0.0F;
b_q[118] = 0.0F;
b_q[130] = q[3];
b_q[142] = 0.0F;
b_q[11] = 0.0F;
b_q[23] = 0.0F;
b_q[35] = 0.0F;
b_q[47] = 0.0F;
b_q[59] = 0.0F;
b_q[71] = 0.0F;
b_q[83] = 0.0F;
b_q[95] = 0.0F;
b_q[107] = 0.0F;
b_q[119] = 0.0F;
b_q[131] = 0.0F;
b_q[143] = q[3];
for (i = 0; i < 12; i++) {
for (i0 = 0; i0 < 12; i0++) {
A_lin[i + 12 * i0] = 0.0F;
for (i1 = 0; i1 < 12; i1++) {
A_lin[i + 12 * i0] += b_A_lin[i + 12 * i1] * P_aposteriori_k[i1 + 12 *i0];
}
c_A_lin[i + 12 * i0] = 0.0F;
for (i1 = 0; i1 < 12; i1++) {
c_A_lin[i + 12 * i0] += b_A_lin[i + 12 * i1] * b_q[i1 + 12 * i0];
}
}
for (i0 = 0; i0 < 12; i0++) {
d_A_lin[i + 12 * i0] = 0.0F;
for (i1 = 0; i1 < 12; i1++) {
d_A_lin[i + 12 * i0] += A_lin[i + 12 * i1] * b_A_lin[i0 + 12 * i1];
}
e_A_lin[i + 12 * i0] = 0.0F;
for (i1 = 0; i1 < 12; i1++) {
e_A_lin[i + 12 * i0] += c_A_lin[i + 12 * i1] * b_A_lin[i0 + 12 * i1];
}
}
}根据上面的矩阵运算,可以得到:
for (i = 0; i < 12; i++) {
for (i0 = 0; i0 < 12; i0++) {
P_apriori[i0 + 12 * i] = d_A_lin[i0 + 12 * i] + e_A_lin[i0 + 12 * i];
}
} //最终过程方差最终得到过程方差::
P_apriori[12∗12]=d_A_lin[12∗12]+e_A_lin[12∗12];
/*
下面开始利用测量值修正先验估计:用到的公式为:
![]()
![]()
![]()
*/
if ((updateVect[0] == 1) && (updateVect[1] == 1) && (updateVect[2] == 1)) {
/*都为1表示三个传感器测量值均有效*/
if ((z[5] < 4.0F) || (z[4] > 15.0F)) {
r[1] = 10000.0F;
}
for (i = 0; i < 12; i++) {
for (i0 = 0; i0 < 9; i0++) {
b_P_apriori[i + 12 * i0] = 0.0F;
for (i1 = 0; i1 < 12; i1++) {
b_P_apriori[i + 12 * i0] += P_apriori[i + 12 * i1] * (real32_T)iv1[i1 + 12 * i0];
}
}
}
for (i = 0; i < 9; i++) {
for (i0 = 0; i0 < 12; i0++) {
K_k[i + 9 * i0] = 0.0F;
for (i1 = 0; i1 < 12; i1++) {
K_k[i + 9 * i0] += (real32_T)iv2[i + 9 * i1] * P_apriori[i1 + 12 * i0];
}
}
for (i0 = 0; i0 < 9; i0++) {
fv0[i + 9 * i0] = 0.0F;
for (i1 = 0; i1 < 12; i1++) {
fv0[i + 9 * i0] += K_k[i + 9 * i1] * (real32_T)iv1[i1 + 12 * i0];
}
}
}同样是计算了一堆中间矩阵:
b_r[0] = r[0];
b_r[9] = 0.0F;
b_r[18] = 0.0F;
b_r[27] = 0.0F;
b_r[36] = 0.0F;
b_r[45] = 0.0F;
b_r[54] = 0.0F;
b_r[63] = 0.0F;
b_r[72] = 0.0F;
b_r[1] = 0.0F;
b_r[10] = r[0];
b_r[19] = 0.0F;
b_r[28] = 0.0F;
b_r[37] = 0.0F;
b_r[46] = 0.0F;
b_r[55] = 0.0F;
b_r[64] = 0.0F;
b_r[73] = 0.0F;
b_r[2] = 0.0F;
b_r[11] = 0.0F;
b_r[20] = r[0];
b_r[29] = 0.0F;
b_r[38] = 0.0F;
b_r[47] = 0.0F;
b_r[56] = 0.0F;
b_r[65] = 0.0F;
b_r[74] = 0.0F;
b_r[3] = 0.0F;
b_r[12] = 0.0F;
b_r[21] = 0.0F;
b_r[30] = r[1];
b_r[39] = 0.0F;
b_r[48] = 0.0F;
b_r[57] = 0.0F;
b_r[66] = 0.0F;
b_r[75] = 0.0F;
b_r[4] = 0.0F;
b_r[13] = 0.0F;
b_r[22] = 0.0F;
b_r[31] = 0.0F;
b_r[40] = r[1];
b_r[49] = 0.0F;
b_r[58] = 0.0F;
b_r[67] = 0.0F;
b_r[76] = 0.0F;
b_r[5] = 0.0F;
b_r[14] = 0.0F;
b_r[23] = 0.0F;
b_r[32] = 0.0F;
b_r[41] = 0.0F;
b_r[50] = r[1];
b_r[59] = 0.0F;
b_r[68] = 0.0F;
b_r[77] = 0.0F;
b_r[6] = 0.0F;
b_r[15] = 0.0F;
b_r[24] = 0.0F;
b_r[33] = 0.0F;
b_r[42] = 0.0F;
b_r[51] = 0.0F;
b_r[60] = r[2];
b_r[69] = 0.0F;
b_r[78] = 0.0F;
b_r[7] = 0.0F;
b_r[16] = 0.0F;
b_r[25] = 0.0F;
b_r[34] = 0.0F;
b_r[43] = 0.0F;
b_r[52] = 0.0F;
b_r[61] = 0.0F;
b_r[70] = r[2];
b_r[79] = 0.0F;
b_r[8] = 0.0F;
b_r[17] = 0.0F;
b_r[26] = 0.0F;
b_r[35] = 0.0F;
b_r[44] = 0.0F;
b_r[53] = 0.0F;
b_r[62] = 0.0F;
b_r[71] = 0.0F;
b_r[80] = r[2];
for (i = 0; i < 9; i++) {
for (i0 = 0; i0 < 9; i0++) {
fv1[i0 + 9 * i] = fv0[i0 + 9 * i] + b_r[i0 + 9 * i];
}
}
/*矩 阵 除 法 ,计算出卡尔曼增益*/
mrdivide(b_P_apriori, fv1, K_k);
/* x_aposteriori=x_apriori+K_k*y_k; */
for (i = 0; i < 9; i++) {
f0 = 0.0F;
for (i0 = 0; i0 < 12; i0++) {
f0 += (real32_T)iv2[i + 9 * i0] * x_apriori[i0];
}
O[i] = z[i] - f0;
}
for (i = 0; i < 12; i++) {
f0 = 0.0F;
for (i0 = 0; i0 < 9; i0++) {
f0 += K_k[i + 12 * i0] * O[i0];
}
x_aposteriori[i] = x_apriori[i] + f0;
}计算状态后验估计:
/* 'attitudeKalmanfilter:137' P_aposteriori=(eye(12)-K_k*H_k)*P_apriori; */
b_eye(dv1);
for (i = 0; i < 12; i++) {
for (i0 = 0; i0 < 12; i0++) {
f0 = 0.0F;
for (i1 = 0; i1 < 9; i1++) {
f0 += K_k[i + 12 * i1] * (real32_T)iv2[i1 + 9 * i0];
}
b_A_lin[i + 12 * i0] = (real32_T)dv1[i + 12 * i0] - f0;
}
}
for (i = 0; i < 12; i++) {
for (i0 = 0; i0 < 12; i0++) {
P_aposteriori[i + 12 * i0] = 0.0F;
for (i1 = 0; i1 < 12; i1++) {
P_aposteriori[i + 12 * i0] += b_A_lin[i + 12 * i1] * P_apriori[i1 + 12
* i0];
}
}
}
}计算方差后验估计:
到此就把所有的量都计算出来了!
下面几种情形为某个传感器未更新的情况,只需改变H矩阵和测量噪声方差矩阵即可,其余运算均类似!
else {
/* 'attitudeKalmanfilter:138' else */
/* 'attitudeKalmanfilter:139' if updateVect(1)==1&&updateVect(2)==0&&updateVect(3)==0 */
if ((updateVect[0] == 1) && (updateVect[1] == 0) && (updateVect[2] == 0)) {
/* 'attitudeKalmanfilter:141' R=[r(1),0,0; */
/* 'attitudeKalmanfilter:142' 0,r(1),0; */
/* 'attitudeKalmanfilter:143' 0,0,r(1)]; */
/* observation matrix */
/* 'attitudeKalmanfilter:146' H_k=[ E, Z, Z, Z]; */
/* 'attitudeKalmanfilter:148' y_k=z(1:3)-H_k(1:3,1:12)*x_apriori; */
/* 'attitudeKalmanfilter:150' S_k=H_k(1:3,1:12)*P_apriori*H_k(1:3,1:12)'+R(1:3,1:3); */ /* 'attitudeKalmanfilter:151' K_k=(P_apriori*H_k(1:3,1:12)'/(S_k)); */
for (i = 0; i < 12; i++) {
for (i0 = 0; i0 < 3; i0++) {
c_P_apriori[i + 12 * i0] = 0.0F;
for (i1 = 0; i1 < 12; i1++) {
c_P_apriori[i + 12 * i0] += P_apriori[i + 12 * i1] * (real32_T)
iv3[i1 + 12 * i0];
}
}
}
for (i = 0; i < 3; i++) {
for (i0 = 0; i0 < 12; i0++) {
fv2[i + 3 * i0] = 0.0F;
for (i1 = 0; i1 < 12; i1++) {
fv2[i + 3 * i0] += (real32_T)iv4[i + 3 * i1] * P_apriori[i1 + 12 *
i0];
}
}
for (i0 = 0; i0 < 3; i0++) {
O[i + 3 * i0] = 0.0F;
for (i1 = 0; i1 < 12; i1++) {
O[i + 3 * i0] += fv2[i + 3 * i1] * (real32_T)iv3[i1 + 12 * i0];
}
}
}
c_r[0] = r[0];
c_r[3] = 0.0F;
c_r[6] = 0.0F;
c_r[1] = 0.0F;
c_r[4] = r[0];
c_r[7] = 0.0F;
c_r[2] = 0.0F;
c_r[5] = 0.0F;
c_r[8] = r[0];
for (i = 0; i < 3; i++) {
for (i0 = 0; i0 < 3; i0++) {
a[i0 + 3 * i] = O[i0 + 3 * i] + c_r[i0 + 3 * i];
}
}
b_mrdivide(c_P_apriori, a, b_K_k);
/* 'attitudeKalmanfilter:154' x_aposteriori=x_apriori+K_k*y_k; */
for (i = 0; i < 3; i++) {
f0 = 0.0F;
for (i0 = 0; i0 < 12; i0++) {
f0 += (real32_T)iv4[i + 3 * i0] * x_apriori[i0];
}
x_n_b[i] = z[i] - f0;
}
for (i = 0; i < 12; i++) {
f0 = 0.0F;
for (i0 = 0; i0 < 3; i0++) {
f0 += b_K_k[i + 12 * i0] * x_n_b[i0];
}
x_aposteriori[i] = x_apriori[i] + f0;
}
/* 'attitudeKalmanfilter:155' P_aposteriori=(eye(12)-K_k*H_k(1:3,1:12))*P_apriori; */
b_eye(dv1);
for (i = 0; i < 12; i++) {
for (i0 = 0; i0 < 12; i0++) {
f0 = 0.0F;
for (i1 = 0; i1 < 3; i1++) {
f0 += b_K_k[i + 12 * i1] * (real32_T)iv4[i1 + 3 * i0];
}
b_A_lin[i + 12 * i0] = (real32_T)dv1[i + 12 * i0] - f0;
}
}
for (i = 0; i < 12; i++) {
for (i0 = 0; i0 < 12; i0++) {
P_aposteriori[i + 12 * i0] = 0.0F;
for (i1 = 0; i1 < 12; i1++) {
P_aposteriori[i + 12 * i0] += b_A_lin[i + 12 * i1] * P_apriori[i1 +
12 * i0];
}
}
}
} else {
/* 'attitudeKalmanfilter:156' else */
/* 'attitudeKalmanfilter:157' if updateVect(1)==1&&updateVect(2)==1&&updateVect(3)==0 */
if ((updateVect[0] == 1) && (updateVect[1] == 1) && (updateVect[2] == 0))
{
/* 'attitudeKalmanfilter:158' if z(6)<4 || z(5)>15 */
if ((z[5] < 4.0F) || (z[4] > 15.0F)) {
/* 'attitudeKalmanfilter:159' r(2)=10000; */
r[1] = 10000.0F;
}
/* 'attitudeKalmanfilter:162' R=[r(1),0,0,0,0,0; */
/* 'attitudeKalmanfilter:163' 0,r(1),0,0,0,0; */
/* 'attitudeKalmanfilter:164' 0,0,r(1),0,0,0; */
/* 'attitudeKalmanfilter:165' 0,0,0,r(2),0,0; */
/* 'attitudeKalmanfilter:166' 0,0,0,0,r(2),0; */
/* 'attitudeKalmanfilter:167' 0,0,0,0,0,r(2)]; */
/* observation matrix */
/* 'attitudeKalmanfilter:170' H_k=[ E, Z, Z, Z; */
/* 'attitudeKalmanfilter:171' Z, Z, E, Z]; */
/* 'attitudeKalmanfilter:173' y_k=z(1:6)-H_k(1:6,1:12)*x_apriori; */
/* 'attitudeKalmanfilter:175' S_k=H_k(1:6,1:12)*P_apriori*H_k(1:6,1:12)'+R(1:6,1:6); */ /* 'attitudeKalmanfilter:176' K_k=(P_apriori*H_k(1:6,1:12)'/(S_k)); */
for (i = 0; i < 12; i++) {
for (i0 = 0; i0 < 6; i0++) {
d_P_apriori[i + 12 * i0] = 0.0F;
for (i1 = 0; i1 < 12; i1++) {
d_P_apriori[i + 12 * i0] += P_apriori[i + 12 * i1] * (real32_T)
iv5[i1 + 12 * i0];
}
}
}
for (i = 0; i < 6; i++) {
for (i0 = 0; i0 < 12; i0++) {
c_K_k[i + 6 * i0] = 0.0F;
for (i1 = 0; i1 < 12; i1++) {
c_K_k[i + 6 * i0] += (real32_T)iv6[i + 6 * i1] * P_apriori[i1 + 12
* i0];
}
}
for (i0 = 0; i0 < 6; i0++) {
fv2[i + 6 * i0] = 0.0F;
for (i1 = 0; i1 < 12; i1++) {
fv2[i + 6 * i0] += c_K_k[i + 6 * i1] * (real32_T)iv5[i1 + 12 * i0];
}
}
}
b_K_k[0] = r[0];
b_K_k[6] = 0.0F;
b_K_k[12] = 0.0F;
b_K_k[18] = 0.0F;
b_K_k[24] = 0.0F;
b_K_k[30] = 0.0F;
b_K_k[1] = 0.0F;
b_K_k[7] = r[0];
b_K_k[13] = 0.0F;
b_K_k[19] = 0.0F;
b_K_k[25] = 0.0F;
b_K_k[31] = 0.0F;
b_K_k[2] = 0.0F;
b_K_k[8] = 0.0F;
b_K_k[14] = r[0];
b_K_k[20] = 0.0F;
b_K_k[26] = 0.0F;
b_K_k[32] = 0.0F;
b_K_k[3] = 0.0F;
b_K_k[9] = 0.0F;
b_K_k[15] = 0.0F;
b_K_k[21] = r[1];
b_K_k[27] = 0.0F;
b_K_k[33] = 0.0F;
b_K_k[4] = 0.0F;
b_K_k[10] = 0.0F;
b_K_k[16] = 0.0F;
b_K_k[22] = 0.0F;
b_K_k[28] = r[1];
b_K_k[34] = 0.0F;
b_K_k[5] = 0.0F;
b_K_k[11] = 0.0F;
b_K_k[17] = 0.0F;
b_K_k[23] = 0.0F;
b_K_k[29] = 0.0F;
b_K_k[35] = r[1];
for (i = 0; i < 6; i++) {
for (i0 = 0; i0 < 6; i0++) {
c_P_apriori[i0 + 6 * i] = fv2[i0 + 6 * i] + b_K_k[i0 + 6 * i];
}
}
c_mrdivide(d_P_apriori, c_P_apriori, c_K_k);
/* 'attitudeKalmanfilter:179' x_aposteriori=x_apriori+K_k*y_k; */
for (i = 0; i < 6; i++) {
f0 = 0.0F;
for (i0 = 0; i0 < 12; i0++) {
f0 += (real32_T)iv6[i + 6 * i0] * x_apriori[i0];
}
b_z[i] = z[i] - f0;
}
for (i = 0; i < 12; i++) {
f0 = 0.0F;
for (i0 = 0; i0 < 6; i0++) {
f0 += c_K_k[i + 12 * i0] * b_z[i0];
}
x_aposteriori[i] = x_apriori[i] + f0;
}
/* 'attitudeKalmanfilter:180' P_aposteriori=(eye(12)-K_k*H_k(1:6,1:12))*P_apriori; */
b_eye(dv1);
for (i = 0; i < 12; i++) {
for (i0 = 0; i0 < 12; i0++) {
f0 = 0.0F;
for (i1 = 0; i1 < 6; i1++) {
f0 += c_K_k[i + 12 * i1] * (real32_T)iv6[i1 + 6 * i0];
}
b_A_lin[i + 12 * i0] = (real32_T)dv1[i + 12 * i0] - f0;
}
}
for (i = 0; i < 12; i++) {
for (i0 = 0; i0 < 12; i0++) {
P_aposteriori[i + 12 * i0] = 0.0F;
for (i1 = 0; i1 < 12; i1++) {
P_aposteriori[i + 12 * i0] += b_A_lin[i + 12 * i1] * P_apriori[i1
+ 12 * i0];
}
}
}
} else {
/* 'attitudeKalmanfilter:181' else */
/* 'attitudeKalmanfilter:182' if updateVect(1)==1&&updateVect(2)==0&&updateVect(3)==1 */
if ((updateVect[0] == 1) && (updateVect[1] == 0) && (updateVect[2] == 1))
{
/* 'attitudeKalmanfilter:183' R=[r(1),0,0,0,0,0; */
/* 'attitudeKalmanfilter:184' 0,r(1),0,0,0,0; */
/* 'attitudeKalmanfilter:185' 0,0,r(1),0,0,0; */
/* 'attitudeKalmanfilter:186' 0,0,0,r(3),0,0; */
/* 'attitudeKalmanfilter:187' 0,0,0,0,r(3),0; */
/* 'attitudeKalmanfilter:188' 0,0,0,0,0,r(3)]; */
/* observation matrix */
/* 'attitudeKalmanfilter:191' H_k=[ E, Z, Z, Z; */
/* 'attitudeKalmanfilter:192' Z, Z, Z, E]; */
/* 'attitudeKalmanfilter:194' y_k=[z(1:3);z(7:9)]-H_k(1:6,1:12)*x_apriori; */
/* 'attitudeKalmanfilter:196' S_k=H_k(1:6,1:12)*P_apriori*H_k(1:6,1:12)'+R(1:6,1:6); */ /* 'attitudeKalmanfilter:197' K_k=(P_apriori*H_k(1:6,1:12)'/(S_k)); */
for (i = 0; i < 12; i++) {
for (i0 = 0; i0 < 6; i0++) {
d_P_apriori[i + 12 * i0] = 0.0F;
for (i1 = 0; i1 < 12; i1++) {
d_P_apriori[i + 12 * i0] += P_apriori[i + 12 * i1] * (real32_T)
iv7[i1 + 12 * i0];
}
}
}
for (i = 0; i < 6; i++) {
for (i0 = 0; i0 < 12; i0++) {
c_K_k[i + 6 * i0] = 0.0F;
for (i1 = 0; i1 < 12; i1++) {
c_K_k[i + 6 * i0] += (real32_T)iv8[i + 6 * i1] * P_apriori[i1 +
12 * i0];
}
}
for (i0 = 0; i0 < 6; i0++) {
fv2[i + 6 * i0] = 0.0F;
for (i1 = 0; i1 < 12; i1++) {
fv2[i + 6 * i0] += c_K_k[i + 6 * i1] * (real32_T)iv7[i1 + 12 *
i0];
}
}
}
b_K_k[0] = r[0];
b_K_k[6] = 0.0F;
b_K_k[12] = 0.0F;
b_K_k[18] = 0.0F;
b_K_k[24] = 0.0F;
b_K_k[30] = 0.0F;
b_K_k[1] = 0.0F;
b_K_k[7] = r[0];
b_K_k[13] = 0.0F;
b_K_k[19] = 0.0F;
b_K_k[25] = 0.0F;
b_K_k[31] = 0.0F;
b_K_k[2] = 0.0F;
b_K_k[8] = 0.0F;
b_K_k[14] = r[0];
b_K_k[20] = 0.0F;
b_K_k[26] = 0.0F;
b_K_k[32] = 0.0F;
b_K_k[3] = 0.0F;
b_K_k[9] = 0.0F;
b_K_k[15] = 0.0F;
b_K_k[21] = r[2];
b_K_k[27] = 0.0F;
b_K_k[33] = 0.0F;
b_K_k[4] = 0.0F;
b_K_k[10] = 0.0F;
b_K_k[16] = 0.0F;
b_K_k[22] = 0.0F;
b_K_k[28] = r[2];
b_K_k[34] = 0.0F;
b_K_k[5] = 0.0F;
b_K_k[11] = 0.0F;
b_K_k[17] = 0.0F;
b_K_k[23] = 0.0F;
b_K_k[29] = 0.0F;
b_K_k[35] = r[2];
for (i = 0; i < 6; i++) {
for (i0 = 0; i0 < 6; i0++) {
c_P_apriori[i0 + 6 * i] = fv2[i0 + 6 * i] + b_K_k[i0 + 6 * i];
}
}
c_mrdivide(d_P_apriori, c_P_apriori, c_K_k);
/* 'attitudeKalmanfilter:200' x_aposteriori=x_apriori+K_k*y_k; */
for (i = 0; i < 3; i++) {
b_z[i] = z[i];
}
for (i = 0; i < 3; i++) {
b_z[i + 3] = z[i + 6];
}
for (i = 0; i < 6; i++) {
fv3[i] = 0.0F;
for (i0 = 0; i0 < 12; i0++) {
fv3[i] += (real32_T)iv8[i + 6 * i0] * x_apriori[i0];
}
c_z[i] = b_z[i] - fv3[i];
}
for (i = 0; i < 12; i++) {
f0 = 0.0F;
for (i0 = 0; i0 < 6; i0++) {
f0 += c_K_k[i + 12 * i0] * c_z[i0];
}
x_aposteriori[i] = x_apriori[i] + f0;
}
/* 'attitudeKalmanfilter:201' P_aposteriori=(eye(12)-K_k*H_k(1:6,1:12))*P_apriori; */
b_eye(dv1);
for (i = 0; i < 12; i++) {
for (i0 = 0; i0 < 12; i0++) {
f0 = 0.0F;
for (i1 = 0; i1 < 6; i1++) {
f0 += c_K_k[i + 12 * i1] * (real32_T)iv8[i1 + 6 * i0];
}
b_A_lin[i + 12 * i0] = (real32_T)dv1[i + 12 * i0] - f0;
}
}
for (i = 0; i < 12; i++) {
for (i0 = 0; i0 < 12; i0++) {
P_aposteriori[i + 12 * i0] = 0.0F;
for (i1 = 0; i1 < 12; i1++) {
P_aposteriori[i + 12 * i0] += b_A_lin[i + 12 * i1] *
P_apriori[i1 + 12 * i0];
}
}
}
} else {
/* 'attitudeKalmanfilter:202' else */
/* 'attitudeKalmanfilter:203' x_aposteriori=x_apriori; */
for (i = 0; i < 12; i++) {
x_aposteriori[i] = x_apriori[i];
}
/* 'attitudeKalmanfilter:204' P_aposteriori=P_apriori; */
memcpy(&P_aposteriori[0], &P_apriori[0], 144U * sizeof(real32_T));
}
}
}
}至此,EKF解算姿态过程全部结束,下面从姿态矩阵中提取欧拉角。其实本质就是计算新的余弦矩阵,然后根据下面的公式计算欧拉角
/* % euler anglels extraction */
/* 'attitudeKalmanfilter:213' z_n_b = -x_aposteriori(7:9)./norm(x_aposteriori(7:9)); */
for (i = 0; i < 3; i++) {
x_n_b[i] = -x_aposteriori[i + 6];
}
rdivide(x_n_b, norm(*(real32_T (*)[3])&x_aposteriori[6]), z_n_b);
/* 'attitudeKalmanfilter:214' m_n_b = x_aposteriori(10:12)./norm(x_aposteriori(10:12)); */
rdivide(*(real32_T (*)[3])&x_aposteriori[9], norm(*(real32_T (*)[3])&
x_aposteriori[9]), wak);
/* 'attitudeKalmanfilter:216' y_n_b=cross(z_n_b,m_n_b); */
for (i = 0; i < 3; i++) {
x_n_b[i] = wak[i];
}
cross(z_n_b, x_n_b, wak);
/* 'attitudeKalmanfilter:217' y_n_b=y_n_b./norm(y_n_b); */
for (i = 0; i < 3; i++) {
x_n_b[i] = wak[i];
}
rdivide(x_n_b, norm(wak), wak);
/* 'attitudeKalmanfilter:219' x_n_b=(cross(y_n_b,z_n_b)); */
cross(wak, z_n_b, x_n_b);
/* 'attitudeKalmanfilter:220' x_n_b=x_n_b./norm(x_n_b); */
for (i = 0; i < 3; i++) {
b_x_aposteriori_k[i] = x_n_b[i];
}
rdivide(b_x_aposteriori_k, norm(x_n_b), x_n_b);
/* 'attitudeKalmanfilter:226' Rot_matrix=[x_n_b,y_n_b,z_n_b]; */
for (i = 0; i < 3; i++) {
Rot_matrix[i] = x_n_b[i];
Rot_matrix[3 + i] = wak[i];
Rot_matrix[6 + i] = z_n_b[i];
}
/* 'attitudeKalmanfilter:230' phi=atan2(Rot_matrix(2,3),Rot_matrix(3,3)); */
/* 'attitudeKalmanfilter:231' theta=-asin(Rot_matrix(1,3)); */
/* 'attitudeKalmanfilter:232' psi=atan2(Rot_matrix(1,2),Rot_matrix(1,1)); */
/* 'attitudeKalmanfilter:233' eulerAngles=[phi;theta;psi]; */
eulerAngles[0] = rt_atan2f_snf(Rot_matrix[7], Rot_matrix[8]);
eulerAngles[1] = -(real32_T)asin(Rot_matrix[6]);
eulerAngles[2] = rt_atan2f_snf(Rot_matrix[3], Rot_matrix[0]);
}
/* End of code generation (attitudeKalmanfilter.c) */
3.下一步
把EKF估计姿态原理和具体算法细节搞清楚之后就可以移植到自己的工程上了,完成后把代码放上来。