wince6.0 NBoot和EBoot概要
nboot相关网址
http://www.cnblogs.com/we-hjb/archive/2008/09/27/1299901.html
S3C2410处理器支持将启动代码存储在NAND Flash中。为了实现这一功能,2410配备了一个名为“Steppingstone”的内部SRAM。在启动时,NAND Flash中第一个4K字节的内容将被加载到Steppingstone中并执行。这个工作由MCU主动完成,而我们只需将NAND Flash配置为Auto Boot模式即可。
一般来说,启动代码会拷贝存储在NAND Flash中的内容至SDRAM中。在使用ECC校验时,NAND Flash中数据的有效性将被确认。在完成拷贝的工作后,启动代码将跳转到已加载到SDRAM中的主程序中,这时启动代码的使命完成,MCU由主程序来控制。
WinCE操作系统从文件的组成来看一般分为两部分:BOOTLOADER和NK.bin。在WinCE中,BOOTLOADER一般为EBOOT。它的主要功能是初始化硬件设备,主要包括CPU内部的相关控制器、内存、网络、串口甚至USB口和LCD。在初始化完成后,它将通过网络或USB从外部下载NK.bin,或从本地Flash中加载NK.bin并执行,从而启动WinCE操作系统。可以看到Eboot虽然是启动代码,但它得完成相当多的工作,最终的映像文件也将超过4K。所以,我们不能直接将Eboot存放在NAND Flash的第一个4K字节中。我们需要一个更小的启动代码,这就是通常所说的NBOOT(NAND BOOT)。
通过上面的介绍,我们知道了NBOOT在整个系统中扮演的角色,它负责将EBOOT加载到内存并运行。在EBOOT开始执行后,NBOOT就退出了历史的舞台,事实上也不再有上场的机会。
在NBOOT的代码实现中,我们必须完成以下几个部分。
1. 初始化CPU内部相关控制器,如设置GPIO,关闭Watch Dog,关闭中断,设置系统时钟。
2. 初始化内存。
3. 初始化串口,主要用来输出调试信息。
4. 初始化NAND Flash,因为在MCU启动时默认是Auto Boot模式,为了从NAND Flash中读取EBOOT,需要将其配置成 NAND Flash Mode。
5. 读取NAND Flash中的EBOOT映像文件,并放在内存指定的位置,这个地址是跟EBOOT有关,介绍EBOOT时再详细说明。
6. 完成读取之后,跳转到EBOOT的起始位置,执行EBOOT代码。
一般来说,前面两个功能在startup.s中实现,WinCE6.0下可以参考文件C:"WINCE600"PLATFORM"DEVICEEMULATOR"SRC"BOOTLOADER"EBOOT"startup.s的相关代码。后面四个功能可在main.c中实现。总之,在实现必备功能的情况下,尽可能减少代码量,以将最后的NBOOT映像文件控制在4K以内。
NBOOT的编译环境一般有两种,ADS1.2(或RVDS)、Platform Builder。用ADS1.2编译NBOOT是比较方便的,需要注意的就是RO Base和RW Base的设置,RO Base必须设置为0x0。否则,系统启动时NBOOT将不被运行。在Post-Linker中选择ARM from ELF,在Linker——ARM fromELF——Output Format中选择Plain Binary,这样,编译完成后最终生成NBoot.bin。该文件就可以固化在NAND Flash的第0个BLOCK中。Platform Builder 6.0是作为VS2005的插件来用的,所以,我们现在也可以用VS2005来编译NBOOT,这样就免得再安装ADS或RVDS等软件。用VS2005来编译NBOOT也有两种方法,第一种跟编译EBOOT映像文件类似,第二种是自己写makefile文件,然后用命令行的方式调用ARM编译器来编译。两种方法各有优点,第一种方法在编译OS时,会自动编译生成映像,而第二种方法可由ADS下的程序直接移植过来,不过,要写好makefile文件是相当困难的事情。一般还是少用为好。
EBoot相关网址 http://www.cnblogs.com/we-hjb/archive/2008/10/07/1305926.html
为一个新的硬件设备定制WinCE6.0操作系统,一般需要完成以下几个主要步骤:
1. 针对特定的硬件设备创建板级支持包(Board Support Package缩写为BSP),BSP必须包括BOOTLOADER、OEM适配层(OEM Adaptation Layer缩写为OAL)和一些必要的驱动。
2. 利用创建的BSP,定制一个系统设计(OS Design)。即通过VS2005创建一个Platform Builder的工程。该工程可编译产生最终的运行时映像文件(Rum-time Image)。
3. 针对板上的外围设备创建相关驱动,并添加到BSP中。
4. 通过创建子工程和Catalog Items的方式,修改OS Design。
5. 编译OS Design,下载编译得到的运行时映像文件到目标设备。此时,可通过远程调试工具进行调试。
6. 在完成所有的调试工作之后,导出该运行时映像对应的SDK(Software Development Kit),应用程序的开发人员可基于此SDK编写该设备的应用程序。
可以看出,在整个WinCE操作系统的移植过程中,BSP的移植是最基础也是最关键的一步。而创建BSP的过程主要包括以下几个内容:
1. 创建BOOTLOADER。BOOTLOADER在开发的过程中用于下载操作系统映像文件。
2. 创建OAL。OAL最终被链接到内核映像文件,它主要完成硬件的初始化和管理。
3. 创建设备驱动。设备驱动是板上外围设备的软件支持。
4. 修改运行时映像的配置文件。配置文件主要包括BIB、REG等文件。
BOOTLOADER的主要作用是将操作系统运行时映像加载到内存,并跳转到OS的启动程序处。它的这一作用跟前一篇介绍的NBOOT的作用完全一致。BOOTLOADER获取运行时映像(一般对应的文件名为NK)一般有两种方法。它可以通过有线连接的方式象网络(Ethernet)、USB或串口从外部下载NK。它也可以从本地的存储器(Flash、Hard Disk)中加载NK。通常,BOOTLOADER通过Ethernet下载操作系统映像故将其称为EBOOT。在开发的过程中使用EBOOT,可以提高开发效率。通过使用EBOOT,你可以很快速的下载NK到目标设备中。而利用Flash编程工具或者是通过JTAG下载则很慢。在一些产品最终发布时,EBOOT是可以去掉的,但也有一些则必须包括BOOTLOADER,像X86的平台就是如此。
至此,我们已经了解了EBOOT的主要功能,为了实现这些功能,EBOOT必须完成以下工作:
1. 初始化MCU。包括初始化MCU的相关寄存器、中断、看门狗、系统时钟、内存和MMU。前面几项跟NBOOT基本一致,但这里增加了对MMU的初始化。
2. 在完成所有的初始化工作之后,调用BootloaderMain()。这个函数的定义在WinCE6.0中对应的文件是C:"WINCE600"PLATFORM"COMMON"SRC"COMMON"BOOT"BLCOMMON"blcommon.c
3. BootloaderMain()主要依次调用以下几个函数,OEMDebugInit()、OEMPlatformInit()、OEMPreDownload()、OEMLaunch(),而这些函数必须由EBOOT的代码来实现。
4. 最终跳转到OAL.exe的StartUp处,进而启动WinCE操作系统。
整个流程如下图所示:

EBOOT的代码可参考C:"WINCE600"PLATFORM"DEVICEEMULATOR"SRC"BOOTLOADER"EBOOT目录。这里针对S3C2410的EBOOT做几点说明。前一篇介绍NBOOT加载EBOOT的方法时提到,NBOOT必须将EBOOT放在内存中指定的位置,这个位置是由EBOOT的来决定的。具体的,在EBOOT中的体现是boot.bib里的内存配置,如下图所示。
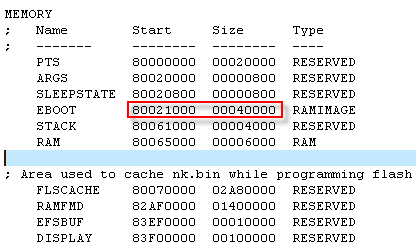
NBOOT加载EBOOT到内存的地址必须与此地址对应。由于在NBOOT中没有使用MMU,所以NBOOT使用的实际地址应该为0x30021000,否则系统将不能正常启动。第二点,如果没有采用NBOOT加载EBOOT的方法,而是将EBOOT直接存储在NOR Flash中,此时必须在EBOOT的代码中实现自加载的过程,即将NOR Flash中的EBOOT全部加载到RAM中,并执行,实现代码如下: