ROS 学习系列 -- 执行turtlebot navigation的方法
我们讲一下如何使用现有的turtlebot launch文件来启动navigation,并在PC上使用rviz指挥。
1. 网络环境布置
turtlebot单片机我们使用的是firefly,rviz运行在PC上,它们使用wifi通讯。master ros运行在firefly上,PC需要指向firefly。在PC修改IP到firefly主机的映射,修改/etc/hosts 文件,如:
在PC上 执行下面的脚本安装:
1. 网络环境布置
turtlebot单片机我们使用的是firefly,rviz运行在PC上,它们使用wifi通讯。master ros运行在firefly上,PC需要指向firefly。在PC修改IP到firefly主机的映射,修改/etc/hosts 文件,如:
sudo nano /etc/hosts
打开hosts后,我们从前面几行开始插入firefly单片机的ip地址和hostname,形式如下:
127.0.0.1 localhost 127.0.1.1 pc_hostname 192.168.1.16 firefly # The following lines are desirable for IPv6 capable hosts ::1 ip6-localhost ip6-loopback fe00::0 ip6-localnet ff00::0 ip6-mcastprefix ff02::1 ip6-allnodes ff02::2 ip6-allrouters完毕后保存并确认可以在PC上ping通firefly名字本身。
在firefly单片机上source下面的脚本内容,设定turtlebot为master ROS节点:
export TURTLEBOT_BASE=roomba export TURTLEBOT_STACKS=circles export TURTLEBOT_3D_SENSOR=asus_xtion_pro export TURTLEBOT_SIMULATION=false export TURTLEBOT_SERIAL_PORT=/dev/ttyUSB0 export ROS_IP=192.168.1.16 export TURTLEBOT_MAP_FILE=/home/firefly/room323.yaml
在PC上source下面的脚本内容,指向turtlebot为master ROS节点:
export ROS_MASTER_URI=http://firefly:11311 export ROS_HOSTNAME=<span style="font-family:SimSun;">pc_hostname</span>
2. 安装必要软件包
在firefly单片机上执行下面的脚本安装:
sudo apt-get install ros-indigo-turtlebot ros-indigo-rocon-app-platform ros-indigo-rocon-multimaster ros-indigo-rocon-msgs ros-indigo-rocon-qt-gui ros-indigo-rocon-tools ros-indigo-std-capabilities ros-indigo-rqt-capabilities ros-indigo-rocon-remocon ros-indigo-rocon-apps ros-indigo-turtlebot-rapps
在PC上 执行下面的脚本安装:
sudo apt-get install ros-indigo-turtlebot-rviz-launchers当然RVIZ 是必须已经安装完了
3. 启动turtlebot和rviz
在firefly单片机上打开一个终端执行下面脚本:
roslaunch turtlebot_bringup minimal.launch
在firefly单片机上打开第二个终端执行下面脚本:
roslaunch turtlebot_app nav_map.launch
注意这里一定要设置环境变量 TURTLEBOT_MAP_FILE 注明地图yaml文件的位置。这个时候,turtlebot已经可以使用了,准备接受命令移动。
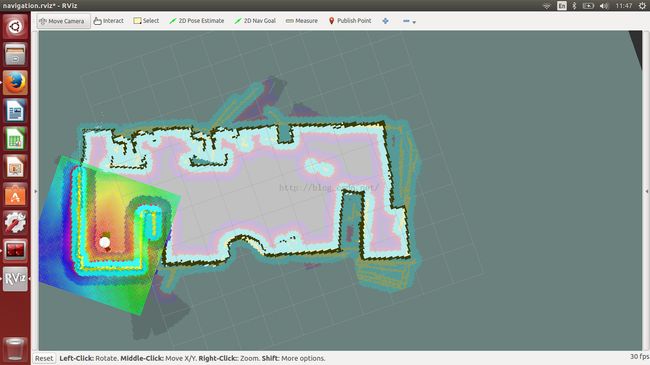
执行下面脚本在PC上执行脚本:
roslaunch turtlebot_rviz_launchers view_navigation.launch --screen这时候就可以看到rviz上显示如下画面,点击按钮'2D Pose Estimate' '2D Nav Goal'就可以导航了:
4. 简化后的turtlebot启动脚本
在firefly单片机上只执行一个简化后的launch脚本也可以,脚本内容如下:
<!--
Right now, the android app is hard coded to look for /cmd_vel as the input
topic.
-->
<launch>
<!-- Turtlebot -->
<arg name="base" default="$(env TURTLEBOT_BASE)" doc="mobile base type [create, roomba]"/>
<arg name="battery" default="$(env TURTLEBOT_BATTERY)" doc="kernel provided locatio for battery info, use /proc/acpi/battery/BAT0 in 2.6 or earlier kernels." />
<arg name="stacks" default="$(env TURTLEBOT_STACKS)" doc="stack type displayed in visualisation/simulation [circles, hexagons]"/>
<arg name="3d_sensor" default="$(env TURTLEBOT_3D_SENSOR)" doc="3d sensor types [kinect, asux_xtion_pro]"/>
<arg name="simulation" default="$(env TURTLEBOT_SIMULATION)" doc="set flags to indicate this turtle is run in simulation mode."/>
<arg name="serialport" default="$(env TURTLEBOT_SERIAL_PORT)" doc="used by create to configure the port it is connected on [/dev/ttyUSB0, /dev/ttyS0]"/>
<arg name="robot_name" default="$(env TURTLEBOT_NAME)" doc="used as a unique identifier and occasionally to preconfigure root namespaces, gateway/zeroconf ids etc."/>
<arg name="robot_type" default="$(env TURTLEBOT_TYPE)" doc="just in case you are considering a 'variant' and want to make use of this."/>
<param name="/use_sim_time" value="$(arg simulation)"/>
<include file="$(find turtlebot_bringup)/launch/includes/robot.launch.xml">
<arg name="base" value="$(arg base)" />
<arg name="stacks" value="$(arg stacks)" />
<arg name="3d_sensor" value="$(arg 3d_sensor)" />
</include>
<include file="$(find turtlebot_bringup)/launch/includes/mobile_base.launch.xml">
<arg name="base" value="$(arg base)" />
<arg name="serialport" value="$(arg serialport)" />
</include>
<arg name="scan_topic" default="scan"/>
<arg name="cmd_vel_topic" default="/teleop/cmd_vel"/>
<arg name="compressed_image_topic" default="/teleop/compressed_image"/>
<include file="$(find turtlebot_bringup)/launch/3dsensor.launch">
<arg name="rgb_processing" value="false" />
<arg name="depth_registration" value="false" />
<arg name="depth_processing" value="false" />
</include>
<!-- Make a slower camera feed available. -->
<!-- *********************** Teleoperation ********************** -->
<param name="camera/rgb/image_color/compressed/jpeg_quality" value="22"/>
<!--
<node pkg="topic_tools" type="throttle" name="camera_throttle" args="messages camera/rgb/image_rect_color/compressed 5"/>
-->
<node pkg="nodelet" type="nodelet" name="teleop_velocity_smoother"
args="load yocs_velocity_smoother/VelocitySmootherNodelet /mobile_base_nodelet_manager">
<rosparam file="$(find turtlebot_bringup)/param/defaults/smoother.yaml" command="load"/>
<remap from="teleop_velocity_smoother/raw_cmd_vel" to="$(arg cmd_vel_topic)"/>
<remap from="teleop_velocity_smoother/smooth_cmd_vel" to="/cmd_vel_mux/input/teleop"/>
<!-- Robot velocity feedbacks; use the one configured as base default -->
<remap from="teleop_velocity_smoother/odometry" to="/odom"/>
<remap from="teleop_velocity_smoother/robot_cmd_vel" to="/mobile_base/commands/velocity"/>
</node>
<!-- *********************** Optimisation *********************** -->
<node pkg="tf" type="tf_change_notifier" name="tf_throttle_for_android_gui">
<param name="polling_frequency" value="5"/>
<param name="translational_update_distance" value="-1"/>
<param name="angular_update_distance" value="-1"/>
<rosparam param="frame_pairs">
- {source_frame: base_footprint, target_frame: map}
- {source_frame: camera_depth_frame, target_frame: map}
</rosparam>
</node>
<!-- *************************** Navi *************************** -->
<include file="$(find turtlebot_navigation)/launch/includes/move_base.launch.xml">
<arg name="odom_topic" value ="/odom" />
</include>
<include file="$(find turtlebot_navigation)/launch/includes/amcl.launch.xml">
<arg name="use_map_topic" value ="true"/>
</include>
<!--
<node pkg="topic_tools" type="throttle" name="relay_compressed_throttle_image" args="messages camera/rgb/image_rect_color/compressed_throttle 5 $(arg compressed_image_topic)" required="true">
<param name="lazy" value="false"/>
</node>
-->
<node pkg="topic_tools" type="throttle" name="relay_scan" args="messages scan 5 $(arg scan_topic)" required="true">
<param name="lazy" value="false"/>
</node>
<!-- Maps -->
<arg name="map_file" default=" $(env TURTLEBOT_MAP_FILE)" />
<node name="map_server" pkg="map_server" type="map_server" args="$(arg map_file)" />
<!-- <node pkg="map_store" type="map_manager" name="map_manager" output="screen"/>-->
<!-- World Canvas -->
<arg name="debug" default="false"/>
<node pkg="world_canvas_server" type="world_canvas_server" name="world_canvas_server" args="$(arg debug)" output="screen">
<param name="start_map_manager" value="true"/>
<param name="auto_save_map" value="false"/>
</node>
</launch>