Android init进程——源码分析
概述
Android本质上是一个基于Linux内核的开源操作系统,与我现在用的Ubuntu系统类似,但是所有的Android设备都是运行在ARM处理器(ARM源自进阶精简指令集机器,源自ARM架构)上,而像Ubuntu操作系统是x86(x86是一系列的基于intel 8086 CPU计算机微处理器指令集架构)系统。不过既然Android也是基于Linux内核的系统,那么基本的启动过程也应该符合Linux的规则。下图基本描述了当你按下电源开关后Android设备的执行步骤:
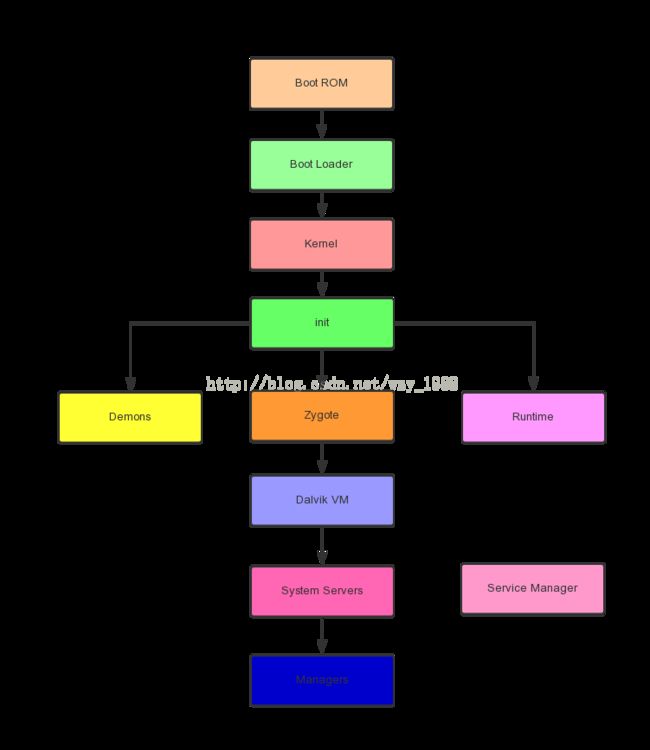
一个完整的Linux系统首先会将一个Linux内核装载到内存,也就是编译Linux内核源代码生产的bzImage文件,对于为Android优化的LInux内核源代码会生成zImage文件。该文件就是Linux内核的二进制版本。由于zImage在内核空间运行,而我们平常使用的软件都是在应用空间运行,内核空间和应用空间是不能直接通过内存地址级别访问的,所以就需要建立某种通讯机制。目前Linux有很多通讯机制可以在用户空间和内核空间之间交互,例如设备驱动文件(位于/dev目录中)、内存文件(/proc、/sys目录等)。Linux的重要特征之一就是一切都是以文件的形式存在,例如,一个设备通常与一个或多个设备文件对应。这些与内核空间交互的文件都在用户空间,所以在Linux内核装载完,需要首先建立这些文件所在的目录,而完成这些工作的程序就是init进程。在分析init的核心代码之前,可以初步了解init的主要做了如下工作:
- Android系统有很多属性,init提供了一个property_service(属性服务)来管理它们。
- 处理配置文件的命令(主要是init.rc文件),包括处理各种Action。
init进程源码
源码位于:system/core/init/目录,本文将基于Android4.4.4_r1版本进行分析。其中init.c是init的主文件,由于init是命令行程序,所以分析init.c需要从main函数入手,我对main函数做了注释,代码如下:
int main(int argc, char **argv)
{
int fd_count = 0;
struct pollfd ufds[4];
char *tmpdev;
char* debuggable;
char tmp[32];
int property_set_fd_init = 0;
int signal_fd_init = 0;
int keychord_fd_init = 0;
bool is_charger = false;
if (!strcmp(basename(argv[0]), "ueventd"))
return ueventd_main(argc, argv);
if (!strcmp(basename(argv[0]), "watchdogd"))
return watchdogd_main(argc, argv);
/* clear the umask */
umask(0);
// 创建用户空间的目录,例如/dev,/proc,/sys等。
mkdir("/dev", 0755);
mkdir("/proc", 0755);
mkdir("/sys", 0755);
mount("tmpfs", "/dev", "tmpfs", MS_NOSUID, "mode=0755");
mkdir("/dev/pts", 0755);
mkdir("/dev/socket", 0755);
mount("devpts", "/dev/pts", "devpts", 0, NULL);
mount("proc", "/proc", "proc", 0, NULL);
mount("sysfs", "/sys", "sysfs", 0, NULL);
// 检测/dev/.booting文件是否可读写和可创建。
close(open("/dev/.booting", O_WRONLY | O_CREAT, 0000));
// 将标准输入、输出、错误输出重定向到/dev/__null__。
open_devnull_stdio();
// 将init的日志输出设备设置为/dev/__kmsg__。
klog_init();
// 初始化和属性相关的资源
property_init();
get_hardware_name(hardware, &revision);
// 处理内核命令行
process_kernel_cmdline();
union selinux_callback cb;
cb.func_log = klog_write;
selinux_set_callback(SELINUX_CB_LOG, cb);
cb.func_audit = audit_callback;
selinux_set_callback(SELINUX_CB_AUDIT, cb);
selinux_initialize();
/* These directories were necessarily created before initial policy load
* and therefore need their security context restored to the proper value.
* This must happen before /dev is populated by ueventd.
*/
restorecon("/dev");
restorecon("/dev/socket");
restorecon("/dev/__properties__");
restorecon_recursive("/sys");
is_charger = !strcmp(bootmode, "charger");
INFO("property init\n");
if (!is_charger)
property_load_boot_defaults();
INFO("reading config file\n");
// 分析/init.rc文件的内容
init_parse_config_file("/init.rc");
// 解析完init.rc配置文件后,会得到一系列的Action动作。
// init将动作的执行时间划分为四个阶段:early-init,init,early-boot,boot
action_for_each_trigger("early-init", action_add_queue_tail);
queue_builtin_action(wait_for_coldboot_done_action, "wait_for_coldboot_done");
queue_builtin_action(mix_hwrng_into_linux_rng_action, "mix_hwrng_into_linux_rng");
queue_builtin_action(keychord_init_action, "keychord_init");
queue_builtin_action(console_init_action, "console_init");
/* execute all the boot actions to get us started */
action_for_each_trigger("init", action_add_queue_tail);
/* skip mounting filesystems in charger mode */
if (!is_charger) {
action_for_each_trigger("early-fs", action_add_queue_tail);
action_for_each_trigger("fs", action_add_queue_tail);
action_for_each_trigger("post-fs", action_add_queue_tail);
action_for_each_trigger("post-fs-data", action_add_queue_tail);
}
/* Repeat mix_hwrng_into_linux_rng in case /dev/hw_random or /dev/random
* wasn't ready immediately after wait_for_coldboot_done
*/
queue_builtin_action(mix_hwrng_into_linux_rng_action, "mix_hwrng_into_linux_rng");
queue_builtin_action(property_service_init_action, "property_service_init");
queue_builtin_action(signal_init_action, "signal_init");
queue_builtin_action(check_startup_action, "check_startup");
if (is_charger) {
action_for_each_trigger("charger", action_add_queue_tail);
} else {
action_for_each_trigger("early-boot", action_add_queue_tail);
action_for_each_trigger("boot", action_add_queue_tail);
}
/* run all property triggers based on current state of the properties */
queue_builtin_action(queue_property_triggers_action, "queue_property_triggers");
#if BOOTCHART
queue_builtin_action(bootchart_init_action, "bootchart_init");
#endif
// 进入无限循环,建立init的子进程(init是所有进程的父进程)
for(;;) {
int nr, i, timeout = -1;
execute_one_command();
restart_processes();
if (!property_set_fd_init && get_property_set_fd() > 0) {
ufds[fd_count].fd = get_property_set_fd();
ufds[fd_count].events = POLLIN;
ufds[fd_count].revents = 0;
fd_count++;
property_set_fd_init = 1;
}
if (!signal_fd_init && get_signal_fd() > 0) {
ufds[fd_count].fd = get_signal_fd();
ufds[fd_count].events = POLLIN;
ufds[fd_count].revents = 0;
fd_count++;
signal_fd_init = 1;
}
if (!keychord_fd_init && get_keychord_fd() > 0) {
ufds[fd_count].fd = get_keychord_fd();
ufds[fd_count].events = POLLIN;
ufds[fd_count].revents = 0;
fd_count++;
keychord_fd_init = 1;
}
if (process_needs_restart) {
timeout = (process_needs_restart - gettime()) * 1000;
if (timeout < 0)
timeout = 0;
}
if (!action_queue_empty() || cur_action)
timeout = 0;
#if BOOTCHART
if (bootchart_count > 0) {
if (timeout < 0 || timeout > BOOTCHART_POLLING_MS)
timeout = BOOTCHART_POLLING_MS;
if (bootchart_step() < 0 || --bootchart_count == 0) {
bootchart_finish();
bootchart_count = 0;
}
}
#endif
nr = poll(ufds, fd_count, timeout);
if (nr <= 0)
continue;
for (i = 0; i < fd_count; i++) {
if (ufds[i].revents == POLLIN) {
if (ufds[i].fd == get_property_set_fd())
handle_property_set_fd();
else if (ufds[i].fd == get_keychord_fd())
handle_keychord();
else if (ufds[i].fd == get_signal_fd())
handle_signal();
}
}
}
return 0;
}
推荐阅读链接
经过了一段时间对Android系统的学习,我发现init进程主要完成了两大块任务:
- 解析init.rc配置文件。
- 属性服务。
针对这两大块任务,我花费精力用Markdown语法重写了两篇文章,建议阅读:
1. Android init进程——属性服务
2. Android init进程——解析配置文件