目录
1. 摘要
2. 简介
3. I2C架构
4. I2C总线初始化
5. I2C适配器驱动
6. I2C设备驱动
7. 用户空间驱动支持
8. 数据传输框架
9. References
1. 摘要
主要介绍Msm7227平台上I2C驱动原理,多数部分是29内核标准架构。
2. 简介
I2C只有两条线,一条串行数据线:SDA,一条是时钟线SCL。I2C是一种多主机控制总线,同一总线上可允许多个master.
i2c总线适配器(adapter)就是一条i2c总线的控制器,在物理连接上若干i2c设备。在linux驱动中,每种处理器平台有自己的适配器驱动。
3. I2C架构
内核中i2c相关代码可以分为三个层次:
i2c框架层:i2c.h和i2c-core.c为其主体框架代码,提供了核心数据结构的定义、i2c适配器驱动和设备驱动的注册、注销管理等;i2c-dev.c用于创建i2c适配器的/dev/i2c-%d设备节点,提供i2c设备的用户空间访问方法等。
i2c总线适配器驱动:i2c/busses/目录下,如i2c-msm.c。定义描述具体i2c总线适配器的i2c_adapter数据结构、实现在具体i2c适配器上的i2c总线通信的具体实现,并由i2c_algorithm数据结构描述与i2c设备通信的方法。
i2c设备驱动:定义描述具体设备的i2c_client和可能的私有数据结构。

上图展示了内核I2C结构大整体框架,以下根据内核加载顺序介绍I2C总线初始化,I2C总线适配器驱动,I2C设备驱动和用户空间驱动支持及数据传输框架五部分介绍。
4. I2C总线初始化
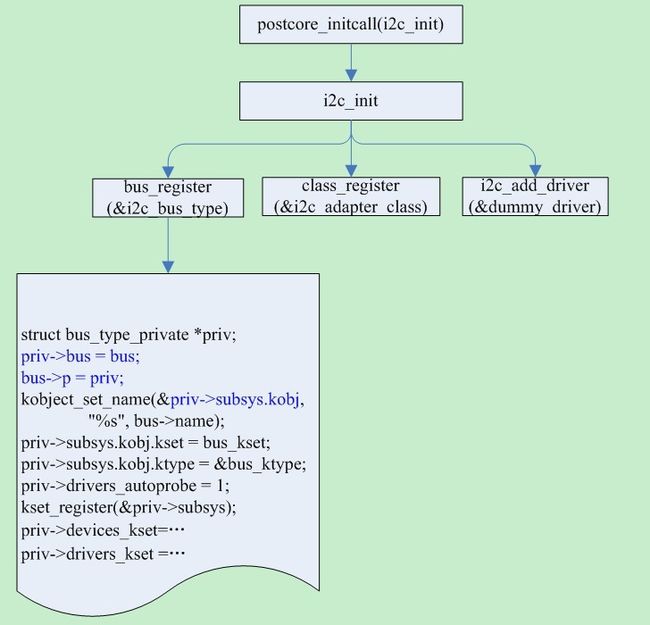
该过程主要完成了sysfs总线结构,最终形成如下结构:
/sys/bus/i2c/
|-- devices
|-- drivers
| |-- dummy
| |-- bind
| |-- uevent
| `-- unbind
|-- drivers_autoprobe
|-- drivers_probe
`-- uevent
和
/sys/class/i2c-adapter/
dummy_driver仅仅是注册了一个空的设备驱动,注册驱动时会遍历加载/sys/class/i2c-adapter/中的所有设备,该过程在初始话总线过程中完成,/sys/class/i2c-adapter/基本为空,所以我认为这里的驱动注册只是验证i2c总线结构的完整性考虑的。
5. I2C适配器驱动

Linux内核的所有适配器驱动程序都在driver/i2c/busses/目录下,当前高通的驱动是i2c-msm.c,适配器驱动的注册过程如下:
在kernel中提供了两个adapter注册接口,分别为i2c_add_adapter()和i2c_add_numbered_adapter().由于在系统中可能存在多个adapter,因为将每一条I2C总线对应一个编号,下文中称为I2C总线号。对于i2c_add_adapter()而言,它使用的是动态总线号,即由系统给其分配一个总线号,而i2c_add_numbered_adapter()则是自己指定总线号,如果这个总线号非法或者是被占用,就会注册失败。高通的adapter驱动使用了i2c_add_numbered_adapter()注册,总线号最初保存在platform_data中。
I2C adapter以platform_device方式注册进系统,在proble函数中初始化了struct i2c_adapter结构:
struct i2c_adapter {
struct module *owner;
unsigned int id;
unsigned int class; /* classes to allow probing for */
const struct i2c_algorithm *algo; /* the algorithm to access the bus */
void *algo_data;
/* --- administration stuff. */
int (*client_register)(struct i2c_client *);
int (*client_unregister)(struct i2c_client *);
/* data fields that are valid for all devices */
u8 level; /* nesting level for lockdep */
struct mutex bus_lock;
struct mutex clist_lock;
int timeout; /* in jiffies */
int retries;
struct device dev; /* the adapter device */
int nr; /*该成员描述了总线号*/
struct list_head clients; /* i2c_client结构链表,该结构包含device,driver和
adapter结构*/
char name[48];
struct completion dev_released;
};
其中nr的值是在arch\arm\mach-msm\devices.c中定义的:
struct platform_device msm_device_i2c = {
.name = "msm_i2c",
.id = 0,
.num_resources = ARRAY_SIZE(resources_i2c),
.resource = resources_i2c,
};
struct platform_device msm_device_i2c_2 = {
.name = "msm_i2c",
.id = 2,
.num_resources = ARRAY_SIZE(resources_i2c_2),
.resource = resources_i2c_2,
};
该结构以参数形式传进i2c_add_numbered_adapter(),下一步将进入
static int i2c_register_adapter(struct i2c_adapter *adap)
{
int res = 0, dummy;
/* Can't register until after driver model init */
if (unlikely(WARN_ON(!i2c_bus_type.p)))
return -EAGAIN;
mutex_init(&adap->bus_lock);
mutex_init(&adap->clist_lock);
INIT_LIST_HEAD(&adap->clients);/*初始化设备链表*/
mutex_lock(&core_lock);
/* Add the adapter to the driver core.
* If the parent pointer is not set up,
* we add this adapter to the host bus.
*/
if (adap->dev.parent == NULL) {
adap->dev.parent = &platform_bus;/*父设备是platform_bus*/
pr_debug("I2C adapter driver [%s] forgot to specify "
"physical device\n", adap->name);
}
dev_set_name(&adap->dev, "i2c-%d", adap->nr);/*设备节点名字*/
adap->dev.release = &i2c_adapter_dev_release;
adap->dev.class = &i2c_adapter_class;
res = device_register(&adap->dev); /*注册adapter这个设备本身*/
if (res)
goto out_list;
dev_dbg(&adap->dev, "adapter [%s] registered\n", adap->name);
/*以下部分完成i2c设备和驱动的注册*/
if (adap->nr < __i2c_first_dynamic_bus_num)/*主板初始化时的动态总线号,该值已导出符号表*/
i2c_scan_static_board_info(adap);/*完成新类型i2c设备的注册,一般只在主板初始化时*/
/* Notify drivers */
dummy = bus_for_each_drv(&i2c_bus_type, NULL, adap,
i2c_do_add_adapter); /*探测总线上的所有i2c设备驱动,同时完成client、driver、device、adapter的绑定,但driver->address_data非空的情况下有用,而这又意味着只对旧的i2c机制有效*/
out_unlock:
mutex_unlock(&core_lock);
return res;
out_list:
idr_remove(&i2c_adapter_idr, adap->nr);
goto out_unlock;
}
static int i2c_register_adapter(struct i2c_adapter *adap)
{
int res = 0, dummy;
/* Can't register until after driver model init */
if (unlikely(WARN_ON(!i2c_bus_type.p)))
return -EAGAIN;
mutex_init(&adap->bus_lock);
mutex_init(&adap->clist_lock);
INIT_LIST_HEAD(&adap->clients);/*初始化设备链表*/
mutex_lock(&core_lock);
/* Add the adapter to the driver core.
* If the parent pointer is not set up,
* we add this adapter to the host bus.
*/
if (adap->dev.parent == NULL) {
adap->dev.parent = &platform_bus;/*父设备是platform_bus*/
pr_debug("I2C adapter driver [%s] forgot to specify "
"physical device\n", adap->name);
}
dev_set_name(&adap->dev, "i2c-%d", adap->nr);/*设备节点名字*/
adap->dev.release = &i2c_adapter_dev_release;
adap->dev.class = &i2c_adapter_class;
res = device_register(&adap->dev); /*注册adapter这个设备本身*/
if (res)
goto out_list;
dev_dbg(&adap->dev, "adapter [%s] registered\n", adap->name);
/*以下部分完成i2c设备和驱动的注册*/
if (adap->nr < __i2c_first_dynamic_bus_num)/*主板初始化时的动态总线号,该值已导出符号表*/
i2c_scan_static_board_info(adap);/*完成新类型i2c设备的注册,一般只在主板初始化时*/
/* Notify drivers */
dummy = bus_for_each_drv(&i2c_bus_type, NULL, adap,
i2c_do_add_adapter); /*探测总线上的所有i2c设备驱动,同时完成client、driver、device、adapter的绑定,但driver->address_data非空的情况下有用,而这又意味着只对旧的i2c机制有效*/
out_unlock:
mutex_unlock(&core_lock);
return res;
out_list:
idr_remove(&i2c_adapter_idr, adap->nr);
goto out_unlock;
}
i2c_scan_static_board_info对应的初始化过程在board-msm7x27.c中完成,
i2c_register_board_info(0,
i2c_devices, ARRAY_SIZE(i2c_devices));
i2c_devices应该是最熟悉不过的了,这个数组中以下面的形式定义了很多I2C设备,一般我们新加一个设备,只需加入type和7bit地址,如下:
#ifdef CONFIG_OV2655
{
I2C_BOARD_INFO("ov2655", 0x60>>1),//modified by yue
},
#endif
#ifdef CONFIG_GC0309
{
I2C_BOARD_INFO("gc0309", 0x42>>1),
},
#endif
#ifdef CONFIG_SENSORS_BMA150
/* G-Sensor driver ( BMA150 ) */
{
I2C_BOARD_INFO("bma150", 0x38),
},
#endif
6. I2C设备驱动
驱动的编写方法已在《msm7227-I2C设备驱动实现要点.doc》中介绍,此节分析驱动和设备的注册过程。

本还想详细分析代码,但发现,这张图已经足够说明i2c驱动的注册过程了,下面对我看代码时碰到的一些问题简要分析。
设备和驱动的关联
大家知道,对于一个驱动程序有两个元素不可或缺,即设备和驱动,一般驱动都是通过设备名和驱动名的匹配建立关系的,我从i2c/chips/里看到的示例代码了只能发现驱动的注册,却不见设备注册的踪影,令人疑惑,跟踪发现,在i2c adapter注册时会遍历i2c_board_info这样一个结构,而这个结构在29以前或更早的内核里是不存在的,该数据结构在board-msm7x27.c中初始化了i2c设备名及设备地址,这便解决了驱动与设备的匹配问题,同时器件地址的提供也有所改变,旧的内核是在驱动中使用一个normal_i2c数组保存地址的。
名字匹配
一个i2c驱动是可以有多个名字的,即一个驱动程序可以支持多个设备,该机制是通过 struct i2c_device_id实现的,驱动中建立这么一个结构体数组,i2c架构层便会扫描该数组,与设备名去匹配,匹配成功的都会进入相应probe函数。
????设备的type, driver的name以及id_table三者的关系如何?必须一致吗?
在做camera的自适应时遇到的问题,gc2015和ov2655的I2C地址相同,只需要在board中注册一个
I2C_BOARD_INFO("ov2655", 0x60>>1),//modified by yue
然后在gc2015中只需要将I2C driver的name也写为ov2655,并且2c_board_info声明为{“ov2655”, 0}
即可实现兼容。
这说明了什么???
进入probe
该过程困惑了我一段时间,其实要进入自己驱动的probe首先需要进入总线的probe,而进入总线probe的前提是与总线的match成功,具体实现大家可以根据上面的图看一下相应代码便知。
设备模型
I2C的架构充分利用的设备模型的原理及sysfs的实现,我认为理解i2C架构前先了解一下设备模型是很有必要的。这里将我的个人理解总结一下:
Kobject是设备模型的最小单位,kset是对kobject的集合,struct driver_private、struct device等结构都内嵌了kobject,kset也内嵌kobject用于表征自己。相同特性的kset的合集又构成了subsys,举个不太恰当的类比:
kobject之于设备或驱动;kset之于某一类设备,如i2c;subsys之于子系统,如输入子系统。其实在29内核中subsys就是一个kset结构,贴两张图理解一下:

7. 用户空间驱动支持
这部分在i2c-dev.c中实现,这部分内容简单的说就是通过内嵌一个具有file_operations的标准字符设备驱动来虚拟i2c设备,这样,就可以在用户空间直接操作i2c设备了。
流程如下图:

余下的就是常规file_operation了,open操作:
static int i2cdev_open(struct inode *inode, struct file *file)
{
unsigned int minor = iminor(inode);
struct i2c_client *client;
struct i2c_adapter *adap;
struct i2c_dev *i2c_dev;
int ret = 0;
lock_kernel();/*内核上锁,一般只在多cpu是有用*/
i2c_dev = i2c_dev_get_by_minor(minor);/*因为有两个adapter,同一个主设备号*/
if (!i2c_dev) {
ret = -ENODEV;
goto out;
}
adap = i2c_get_adapter(i2c_dev->adap->nr);
if (!adap) {
ret = -ENODEV;
goto out;
}
/* This creates an anonymous i2c_client, which may later be
* pointed to some address using I2C_SLAVE or I2C_SLAVE_FORCE.
*
* This client is ** NEVER REGISTERED ** with the driver model
* or I2C core code!! It just holds private copies of addressing
* information and maybe a PEC flag.
*/
client = kzalloc(sizeof(*client), GFP_KERNEL);
if (!client) {
i2c_put_adapter(adap);
ret = -ENOMEM;
goto out;
}
snprintf(client->name, I2C_NAME_SIZE, "i2c-dev %d", adap->nr);
client->driver = &i2cdev_driver;/*绑定字符设备驱动*/
client->adapter = adap;
file->private_data = client;
out:
unlock_kernel();
return ret;
}
注意这里分配并初始化了一个struct i2c_client结构.但是没有注册这个clinet.此外,这个函数中还有一个比较奇怪的操作.不是在前面已经将i2c_dev->adap指向要操作的adapter么?为什么还要以adapter->nr为关键字从i2c_adapter_idr去找这个操作的adapter呢?注意了,调用i2c_get_adapter()从总线号nr找到操作的adapter的时候,还会增加module的引用计数.这样可以防止模块意外被释放掉.也许有人会有这样的疑问,那 i2c_dev->adap->nr操作,如果i2c_dev->adap被释放掉的话,不是一样会引起系统崩溃么?这里因为,在i2cdev_attach_adapter()间接的增加了一次adapter的一次引用计数.如下:
看到了么,i2c_dev内嵌的device是以adap->dev为父结点,在device_create()中会增次adap->dev的一次引用计数.static int i2cdev_attach_adapter(struct i2c_adapter *adap)
{
......
i2c_dev->dev = device_create(i2c_dev_class, &adap->dev,
MKDEV(I2C_MAJOR, adap->nr),
"i2c-%d", adap->nr);
......
}
好了,open()操作到此就完成了.
使用方法:(参考kernel-test/i2c-msm-test.c)
1)通过构造struct i2c_msg
[读] struct i2c_msg msgs[] = {
[0] = {
.addr = slave_address,
.flags = 0,
.buf = (void *)offset_data,
.len = ARRAY_SIZE(offset_data),
},
[1] = {
.addr = slave_address,
.flags = I2C_M_RD,
.buf = (void *)buf,
.len = count,
},
};
[写] struct i2c_msg msgs[] = {
[0] = {
.addr = slave_address,
.flags = 0,
.buf = (void *)data,
.len = (2 + len) * sizeof(*data),
},
}
2)通过ioctl操作设备
static int do_rdwr(int fd, struct i2c_msg *msgs, int nmsgs)
{
struct i2c_rdwr_ioctl_data msgset = {
.msgs = msgs,
.nmsgs = nmsgs, /* msgs 个数*/
};
if (msgs == NULL || nmsgs <= 0)
return -1;
if (ioctl(fd, I2C_RDWR, &msgset) < 0)
return -1;
return 0;
}
3)通过ioctl命令字:
#define I2C_SMBUS_READ 1
#define I2C_SMBUS_WRITE 0
#define I2C_SMBUS_QUICK 0
#define I2C_SMBUS_BYTE 1
#define I2C_SMBUS_BYTE_DATA 2
#define I2C_SMBUS_WORD_DATA 3
#define I2C_SMBUS_PROC_CALL 4
#define I2C_SMBUS_BLOCK_DATA 5
#define I2C_SMBUS_I2C_BLOCK_DATA 6
#define I2C_SMBUS_BLOCK_PROC_CALL 7
#define I2C_RETRIES 0x0701
#define I2C_TIMEOUT 0x0702
#define I2C_SLAVE 0x0703
#define I2C_SLAVE_FORCE 0x0706
#define I2C_TENBIT 0x0704
#define I2C_FUNCS 0x0705
#define I2C_RDWR 0x0707
#define I2C_PEC 0x0708
#define I2C_SMBUS 0x0720
8. 数据传输框架
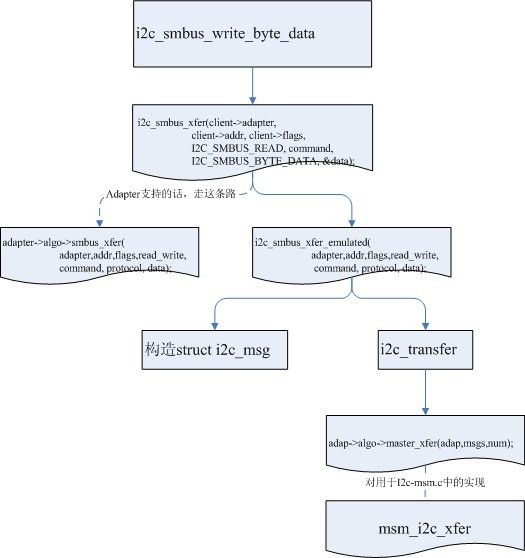
I2C架构的读写支持两种类型,默认实现的操作是smbus协议,该协议与i2c协议类似,如果控制器不支持smbus,框架层可以用i2c_transfer模拟smbus的实现,系统默认的i2c传输函数一般都是基于i2c模拟的smbus方法传输的,如i2c_smbus_write_byte_data,i2c_smbus_read_byte_data等。
下图以i2c_smbus_write_byte_data介绍数据流程:I2C协议的总线实现应该是I2C控制器,而不是SMBUS控制器, I2C协议和SMBUS协议不完成等同,SMBUS是I2C的子集,smbus由I2C衍生而来。smbus总线上传输的数据一定是I2C的格式的,但是SMBUS上传输的数据不一定能满足具体某个I2C从设备的通信要求(数据序列)。
9. References
[1]. http://www.linuxidc.com/Linux/2011-02/32497.htm
[2].《msm7227-I2C设备驱动实现要点.doc》 滕景东
原文地址:
http://www.linuxidc.com/Linux/2011-02/32496.htm